
引言
参加过智能车竞赛的同学应该深有体会,电机驱动设计水很深,不能马虎,一但出问题,可能就是“火光四射”了。并且驱动的好坏也影响了电机性能的发挥,下面我们来设计一个BTN电机驱动电路。
正文
H桥电路是经典的电机驱动电路,我们本次就采用BTN芯片来搭电机驱动电路。当然,电机驱动的布线也是很有讲究的,因为我们使用的是120W的电机,额定电流10A,所以对散热,耐压等因素的考虑一定不能疏忽。
首先我们找到BTN芯片的datasheet获得芯片的相关参数,这肯定是有助于我们电路设计的,不过小白就不在这里陪大家读啦。
我们来了解一下H桥电路,H桥是一个典型的控制直流电机的电路,这个H桥电路能够让负载两端的电压反相,电流反向,这样也就可以实现电机转向的调节了。其中我们的通常使用PWM脉宽调制波形来进行电机的控制,通过占空比的调节来实现电机控速。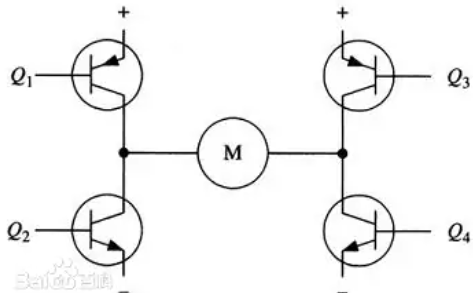
大致了解了之后,我们就开始动手设计吧,首先我们需要一个MCU主控芯片,来生成脉宽调制波形,也就是PWM波。我们就采用最常用的STM32单片机来实现。第一步先画出单片机的最小系统板。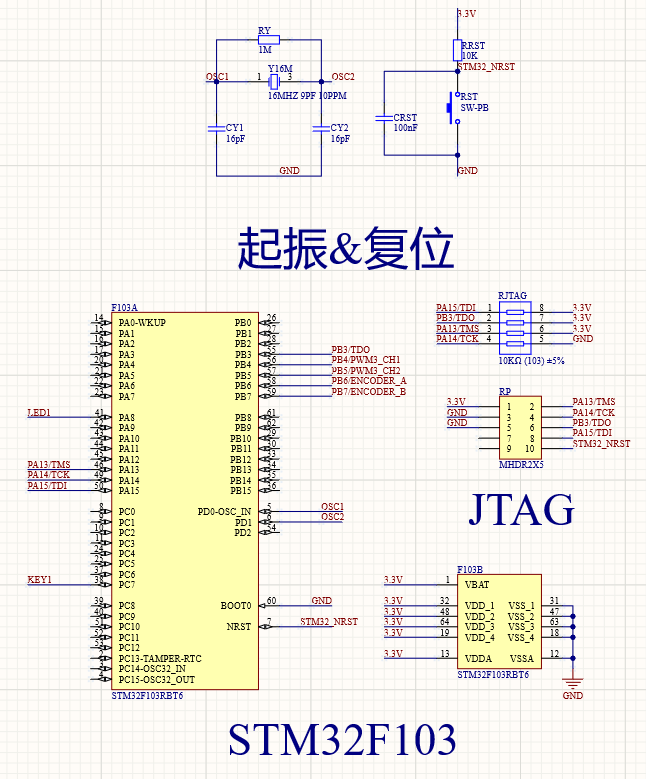
然后我们再在cubemx上将PWM引脚进行配置并生成对应的软件工程,分频系数和周期时间等都需要进行设置,当然这个参数也是需要匹配电机的参数的。
到此我们有了软件工程,那我们就继续进行电路设计吧,有了PWM的输出引脚后,我们首先要在BTN芯片跟单片机引脚之间加上单向隔离作为MCU的保护。用的是74LVC245芯片。
之后就到了我们最重要的H桥电路部分了,由于BTN耐压值以及额定电流等参数都相当大,至少用于智能车竞赛那是绰绰有余了,所以完全不需要担心堵转烧坏板子的问题。下面我就直接放上H桥的电路。
到这一步,你以为就结束了嘛。当然没有,光是原理图的教学,完全不够干货,毕竟百度上也有一大堆嘛。
那我这次就针对驱动板的布线给大家讲讲需要注意的点叭
首先我们的两个BTN芯片要尽量的放置在靠近的位置,由于电机线的布线考虑其承载的电流大小,并不能采用信号线的粗细来布置,尤其是在驱动功率较大的电机时,线太细发热严重甚至会烧坏板子。我项目里使用的线宽为90mil。
但是并不是所有连接到BTN芯片的线都需要加粗的,我们只需要关注电源到BTN芯片到地线的回路即可。如下图: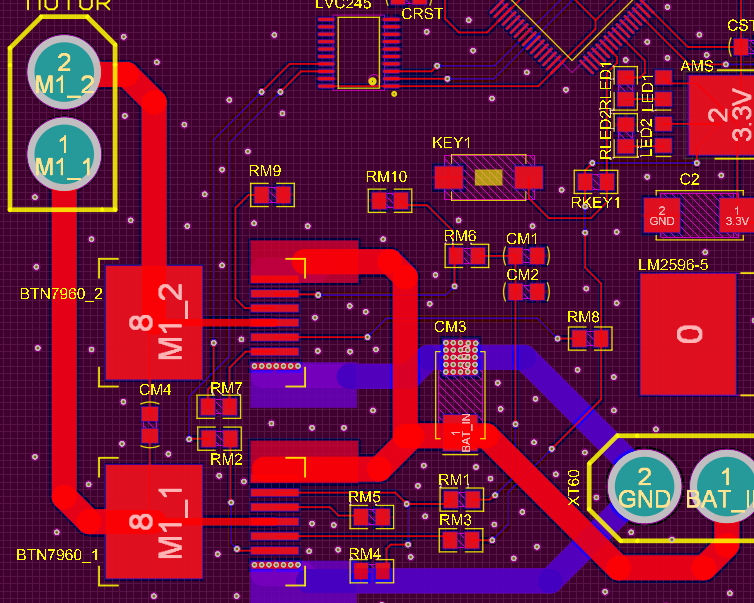
由于我驱动的是120W的电机,电压为12V,所以电流就会达到接近10A,但是电机堵转时的电流甚至有可能达到额定电流的十倍,这样的话就超出了BTN芯片所能承受的范围了。因此我们不仅要在算法上做好保护,电路上也必须做到一定程度的保护。
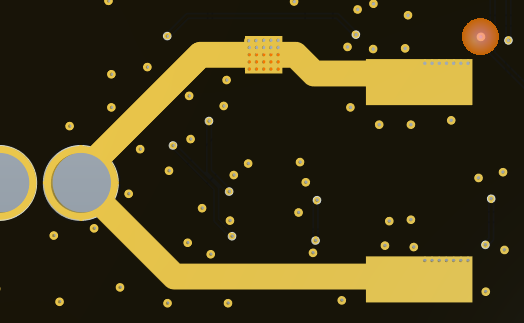
所以我对电源到BTN到地的回路不仅加粗了线宽,而且对这些线进行开窗。
开窗是什么意思呢,其实就是把线上的阻焊层油漆都去掉,直接暴露出铜皮。在我们拿到板子的时候,对开窗的线路进行覆锡,这样就能通过增加线的厚度,来提高过电流的能力。效果如下图: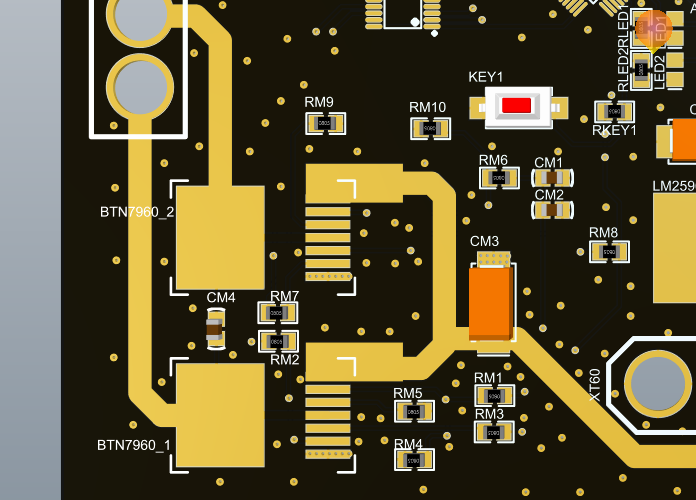
到这基本上就完成了驱动需要注意的点。仔细的小伙伴可能会发现我的板子上覆铜的地方打了许多的过孔。这些过孔又有什么作用呢?
其实,在印刷电路板的布线分布上,不同的分布也会影响电路的工作。当布线长度大于噪声频率相应波长的1/20时,就会产生天线效应,噪声就会通过布线向外发射,如果PCB中存在不良接地的覆铜,此时覆铜就会成为传播噪声的工具。因此,在高频电路中,多层板的地线分布都甚有讲究。并且打过孔还能降低板子的输出阻抗,分散同向电流,减少过孔电感,当然主要也是为了降低阻抗。
虽然这个操作对我们这个工程的影响并不大,所以可打也可不打,这不过是小白的一个习惯罢了。
总结
这期也是干货满满呀,给做智能车的小白们提供了驱动的方案,并且经过小白测试是相当稳定的哟,不仅如此,布线时需要注意的点,也会减少以后走的弯路。
最后需要电路原理图和PCB布线图的可以下方留言哟~~
喜欢的话可以点个赞鼓励鼓励小白!



评论(0)
您还未登录,请登录后发表或查看评论