目录
- 1.flag
- 2.资料准备
- 3.环境搭建
-
- ① 系统准备
- ② 安装ide
- ③ ros2安装
-
- Ⅰ设置语言环境
- Ⅱ 安装源
- Ⅲ 安装ros2 软件包
- Ⅳ 环境设置
-
- 1.source 安装脚本
- 2.安装自动补全工具
- 3.安装编译工具
- ④ ros2 初体验
1.flag
因为之前使用的ros1还是ros2,自己学习的都比较片面,只是简单的实用主义,用到什么就去查什么,导致在真正的项目中,选用的方案太过单一和复杂,其实可以有更多实现方式,只是自己不太了解,所以决定快速的学习ros2,并记录在本专栏里:
ros2 学习
2.资料准备
- 官方gitub https://github.com/ros2
- 官方文档 https://index.ros.org/doc/ros2/
- colcon 使用文档 https://colcon.readthedocs.io/en/released/
- 官方demo https://github.com/ros2/demos
- 官方api接口 c++ http://docs.ros2.org/dashing/api/rclcpp/index.html
- 官方api接口 python http://docs.ros2.org/dashing/api/rclpy/index.html
- Core Stack Developer Overview http://docs.ros2.org/dashing/developer_overview.html#core-stack-developer-overview
- CMAKE3.5文档 https://cmake.org/cmake/help/latest/release/3.5.html
这些网站最好收藏下,官方文档,官方源码才是真道理,有编程基础和linux基础,可以用python3了
3.环境搭建
① 系统准备
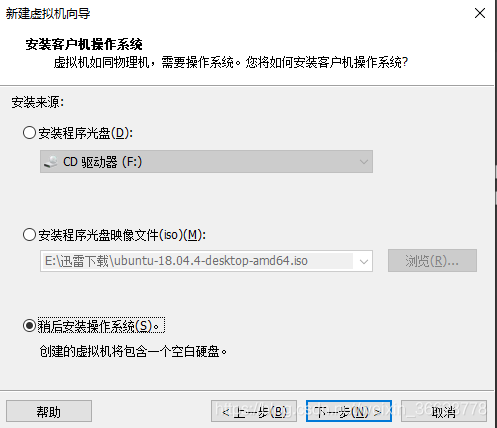
准备使用
ubuntu18.04版本,使用虚拟机安装,具体如何安装,自行搜索,VMware安装18.04 需要注意一下,选
稍后安装操作系统,自动安装会各种不成功
② 安装ide
这边C++安装的是clion,python安装的是pycharm
官网
https://www.jetbrains.com/
active 参考我的博客
https://blog.csdn.net/weixin_36628778/article/details/104937955
③ ros2安装
按照官方指导来
https://index.ros.org/doc/ros2/Installation/Dashing/Linux-Install-Debians/
Ⅰ设置语言环境
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
Ⅱ 安装源
安装GPG密钥
sudo apt update && sudo apt install curl gnupg2 lsb-release
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
添加源列表,
这里不使用官方的源,使用清华大学的镜像源
sudo sh -c 'echo "deb http://mirror.tuna.tsinghua.edu.cn/ros2/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros2-latest.list'
Ⅲ 安装ros2 软件包
我这边安装desktop版本
sudo apt update
sudo apt install ros-dashing-desktop
Ⅳ 环境设置
1.source 安装脚本
source /opt/ros/dashing/setup.bash
2.安装自动补全工具
工欲善其事必先利其器,很重要
sudo apt install python3-argcomplete
3.安装编译工具
sudo apt install python3-colcon-common-extensions
④ ros2 初体验
执行c++ talker demo
ros2 run demo_nodes_cpp talker
执行 python listener demo
ros2 run demo_nodes_py listener
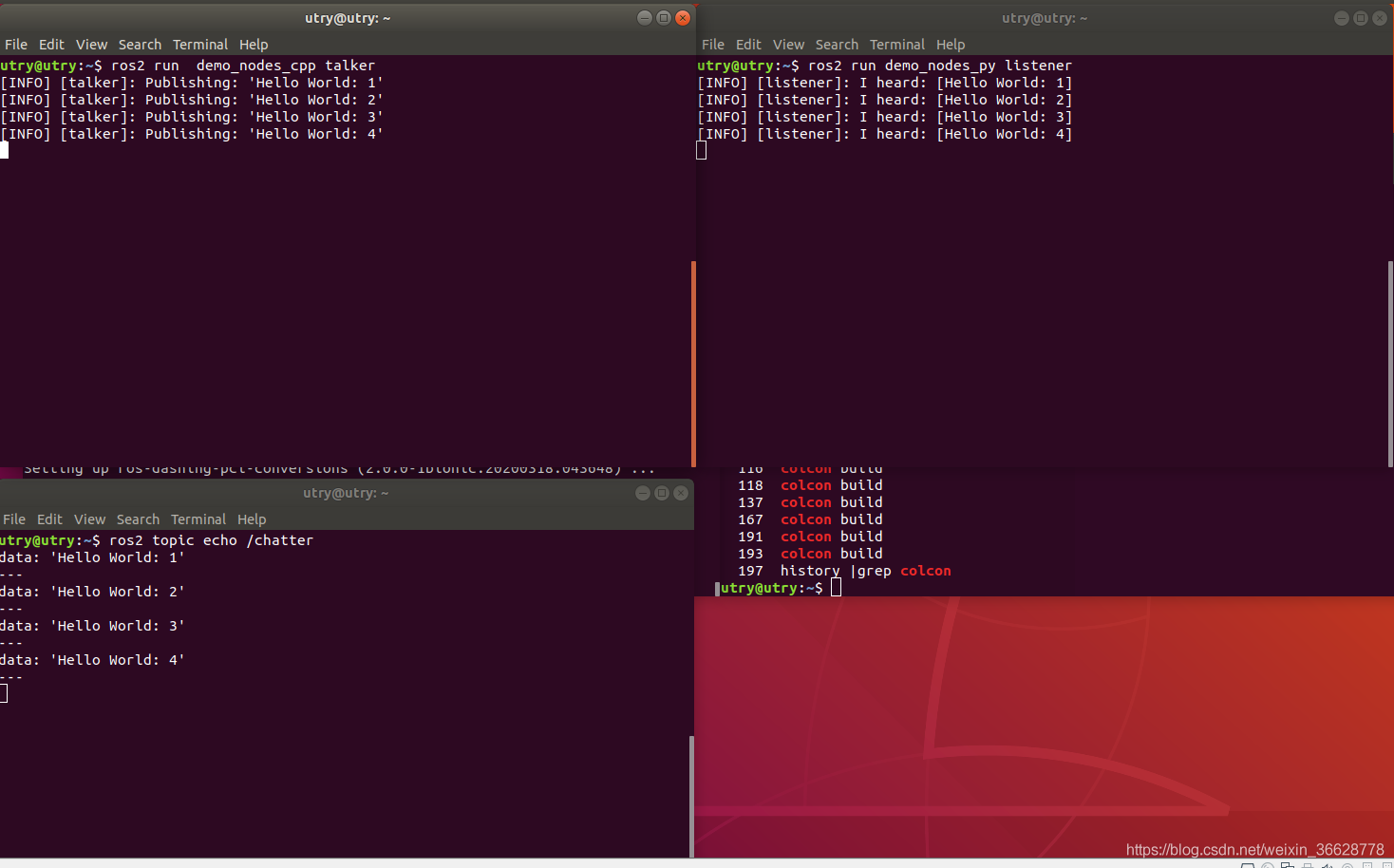
取消了master,消息类型和ros1一样,命令保持不变
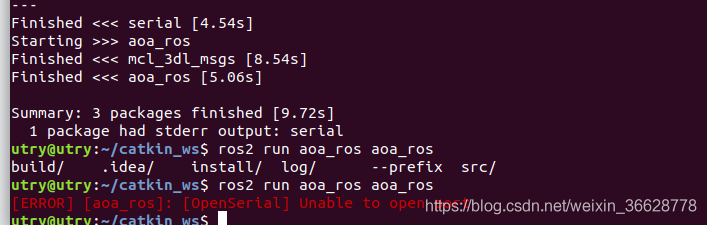
使用了colcon build 之后界面简单多了



评论(1)
您还未登录,请登录后发表或查看评论