

目录
一、编码器简介
二、编码器工作原理
三、编码器分类
(1)增量式编码器
(2)绝对式编码器
四、编码器测量方案
一、采用单片机外部中断计数来实现计算
二、采用单片机的输入捕获,跟第一种方法类似
三、采用专用编码器接口
一、编码器简介
编码器是一种广泛使用的位置式传感器,它能够检测细微的运动,其输出为数字信号。编码器中应用最为广泛的就是光电编码器,可以用来进行角度的测量。可以用来测量位置,测量转速。
【wiki https://zh.wikipedia.org/wiki/%E6%97%8B%E8%BD%89%E7%B7%A8%E7%A2%BC%E5%99%A8】
旋转编码器(rotary encoder)也称为轴编码器,是将旋转位置或旋转量转换成模拟或数字信号的机电设备。一般装设在旋转物体中垂直旋转轴的一面。旋转编码器用在许多需要精确旋转位置及速度的场合,如工业控制、机器人技术、专用镜头、电脑输入设备(如鼠标及轨迹球)等。
旋转编码器可分为绝对型(absolute)编码器及增量型(incremental)编码器两种。增量型编码器也称作相对型编码器(relativeencoder),利用检测脉冲的方式来计算转速及位置[1],可输出有关旋转轴运动的信息,一般会由其他设备或电路进一步转换为速度、距离、每分钟转速或位置的信息。绝对型编码器会输出旋转轴的位置,可视为一种角度传感器。
二、编码器工作原理
编码器是用光电方法把被测角位移转换成数字代码形式的电信号的转换部件。

四倍频的方法是测量A相和B相的上升沿和下降沿。
三、编码器分类
编码器可以分为增量式编码器和绝对式编码器
(1)增量式编码器
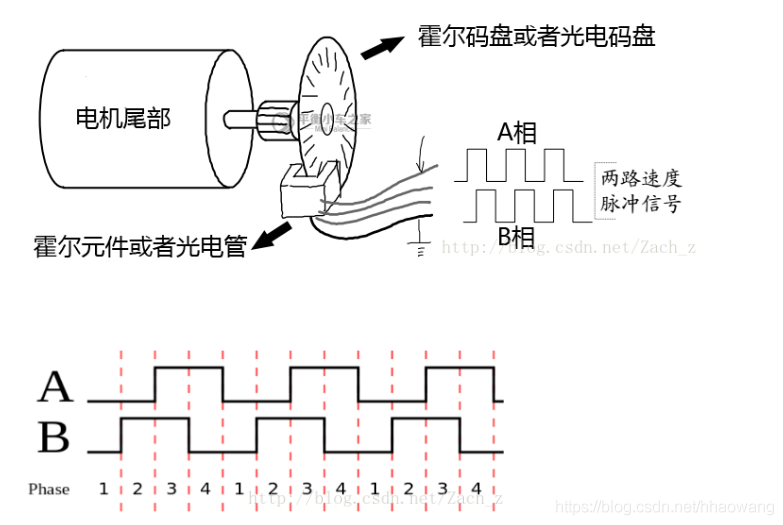
①增量式编码器轴旋转时,有相应的脉冲输出,其旋转的方向判别和脉冲数量的增减可以借助外部的判断电路或者计数器实现。
②计数器起点可任意设定,并可实现多圈的无线累加和测量,还可以把每转发出的一个脉冲Z信号作为机械参考零位。
③编码器的轴转一周会输出固定的脉冲数,对于光学旋转编码器,输出脉冲数与编码器光栅的刻线数相同。需要提高分辨率时,可利用90°相位差的A、B两相信号对原信号进行倍频,或者更换更高分辨率的编码器。
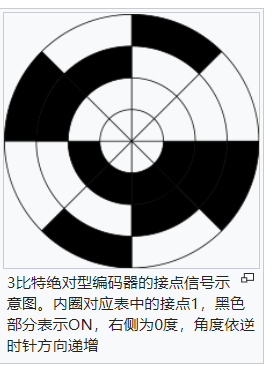
(2)绝对式编码器
①绝对式编码器是利用自然二进制或者循环二进制方式进行光电转换的,有若干编码,根据码盘上的编码数读数,检测绝对位置。从编码大小的变更即可判断旋转方向和转轴所处的位置,因而无需判向电路。
②它有一个绝对零位代码,当停电或者关机以后,再开机重新测量时,仍可准确地读出停电或者关机时位置的代码,并准确找到零位代码。
③一般情况下,绝对式编码器的测量范围为0°~360°,特殊型号也可以实现多圈测量。
四、编码器测量方案
编码器的测量我们可以从原理上得出有3种方式可以获得:
一、采用单片机外部中断计数来实现计算
缺点:不够精确,电机在运动过程中,稍微接线有些抖动就会产生误差。
二、采用单片机的输入捕获,跟第一种方法类似
缺点:不够精确,电机在运动过程中,稍微接线有些抖动就会产生误差。
三、采用专用编码器接口
缺点:存在零点问题,可以软件处理
#include "stm32f10x.h"
#include "encode.h"
#include "misc.h"
#include "nvic.h"
#include "sys.h"
#include "delay.h"
void TIM4_Mode_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
//PB6 ch1 A,PB7 ch2
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//使能TIM4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能GPIOA时钟
GPIO_StructInit(&GPIO_InitStructure);//将GPIO_InitStruct中的参数按缺省值输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//PA6 PA7浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
NVIC_Config(2);
TIM_DeInit(TIM4);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = (360-1)*4; //设定计数器重装值 TIMx_ARR = 359*4
TIM_TimeBaseStructure.TIM_Prescaler = 0; //TIM3时钟预分频值
TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1 ;//设置时钟分割 T_dts = T_ck_int
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_BothEdge ,TIM_ICPolarity_BothEdge);//使用编码器模式3,上升下降都计数
TIM_ICStructInit(&TIM_ICInitStructure);//将结构体中的内容缺省输入
TIM_ICInitStructure.TIM_ICFilter = 6; //选择输入比较滤波器
TIM_ICInit(TIM4, &TIM_ICInitStructure);//将TIM_ICInitStructure中的指定参数初始化TIM3
// TIM_ARRPreloadConfig(TIM4, ENABLE);//使能预装载
TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除TIM3的更新标志位
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);//运行更新中断
//Reset counter
TIM4->CNT = 0;//
TIM_Cmd(TIM4, ENABLE); //启动TIM4定时器
}
#include "stm32f10x.h"
#include "misc.h"
#include "nvic.h"
#include "sys.h"
#include "delay.h"
/*
中断分配说明,优先级由高向低排
顺序 类型 作用 抢占优先级 响应优先级
1 EXTI1 编码器Z相归0 0 0
2 TIM4 定时器的编码器模式 1 1
3 USART1 串口通信中断 2 1
*/
//1.-----Z信号归零 PA1
void PA_NVIC_Config(NVIC_InitTypeDef NVIC_InitStructure1)
{
NVIC_InitStructure1.NVIC_IRQChannel = EXTI1_IRQn;
NVIC_InitStructure1.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure1.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure1.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure1);
}
//2----定时器的编码器接口模式,对编码器进行计数
void TIM4_NVIC_Config(NVIC_InitTypeDef NVIC_InitStructure2)
{
NVIC_InitStructure2.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure2.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure2.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure2.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure2);
}
//3----串口1通信,用于Modbus-Rtu-485S
void USART1_NVIC_Config(NVIC_InitTypeDef NVIC_InitStructure4)
{
NVIC_InitStructure4.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure4.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure4.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure4.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure4);
}
void NVIC_Config(u8 Interrupt_flag)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 配置中断使用组合 抢占式3位(0-7),响应式1位(0-1) */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_3);
if(Interrupt_flag == 1)
{
/*外部中断1,Z相归零----优先级最高 0 0*/
PA_NVIC_Config(NVIC_InitStructure);
}
if(Interrupt_flag == 2)
{
/*TIM4中断,编码器解码----优先级 1 1*/
TIM4_NVIC_Config(NVIC_InitStructure);
}
if(Interrupt_flag == 3)
{
/* USART1中断,数据接收----优先级 2 1*/
USART1_NVIC_Config(NVIC_InitStructure);
}
}
Reference:
【1】https://blog.csdn.net/zhu751191958/article/details/79322140
【2】https://zh.wikipedia.org/wiki/%E6%97%8B%E8%BD%89%E7%B7%A8%E7%A2%BC%E5%99%A8
【3】https://blog.csdn.net/zhu751191958/article/details/79322233



评论(0)
您还未登录,请登录后发表或查看评论