

超声波避障程序随处可见,基于51单片机的超声波避障小车也很成熟,但是完整的Proteus仿真并不容易找到开源资料。这次主要给大家分享其Proteus仿真部分。涉及到的模块有:超声波模块(hc-sr04)、L293D电机驱动器和直流减速电机。这/样配合51单片机的控制,小车可以完成自主避障功能。
超声波模块
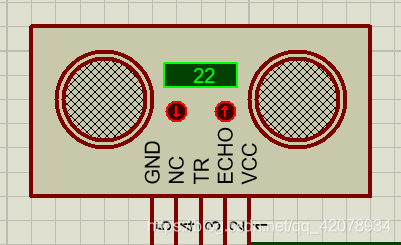
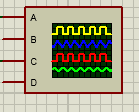
此图为Proteus 8 提供的超声波模块(SRF04),它有5个引脚,其中GND接地、VCC接高电平、NC可不接。TR用作激发信号的输入,当超声波模块在TR引脚上检测到了连续的10us以上的高电平时,超声波模块才开始工作。ECHO用作反馈信号输出,当超声波检测到有障碍物时,从该引脚输出相应信号。
电机驱动模块
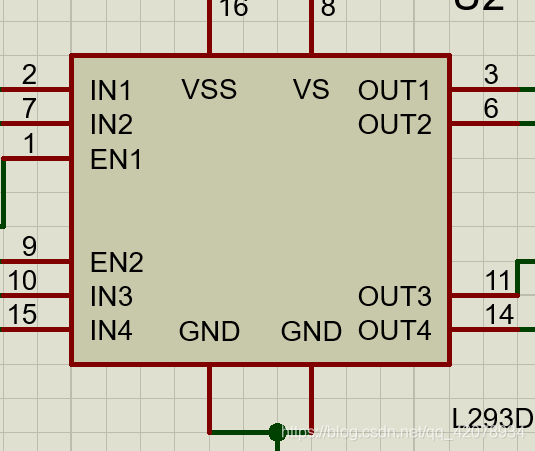
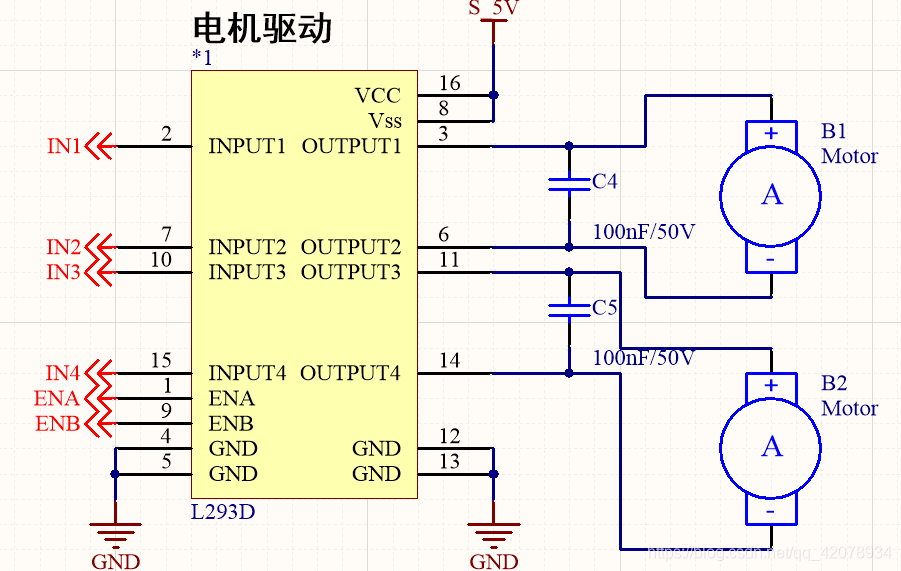
上图为Proteus 8提供的电机驱动模块(L293D),4个IN 引脚与单片机连接,控制电机转动及方向,2个使EN 能引脚同样与单片机连接。4个OUT,连接两个直流电机。VSS引脚与VS引脚接高电平即可。
加载程序
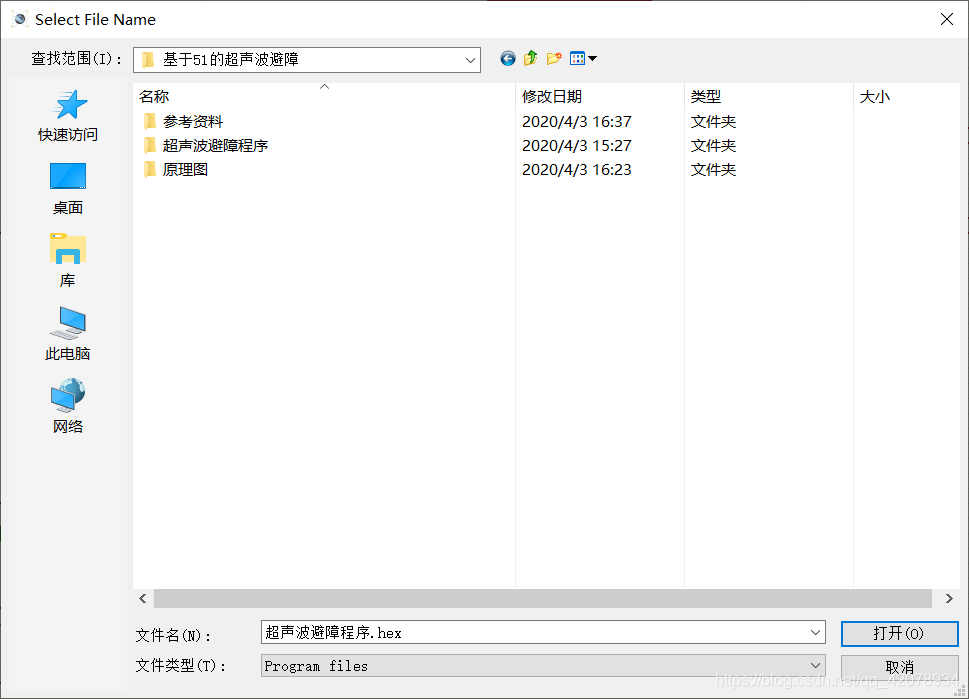
双击添加的AT89C51单片机,出现如下对话框。

点击 Program File 此行文件夹图标,添加HEX文件(keil软件编写程序后编译生成)
点击运行即可。
示波器
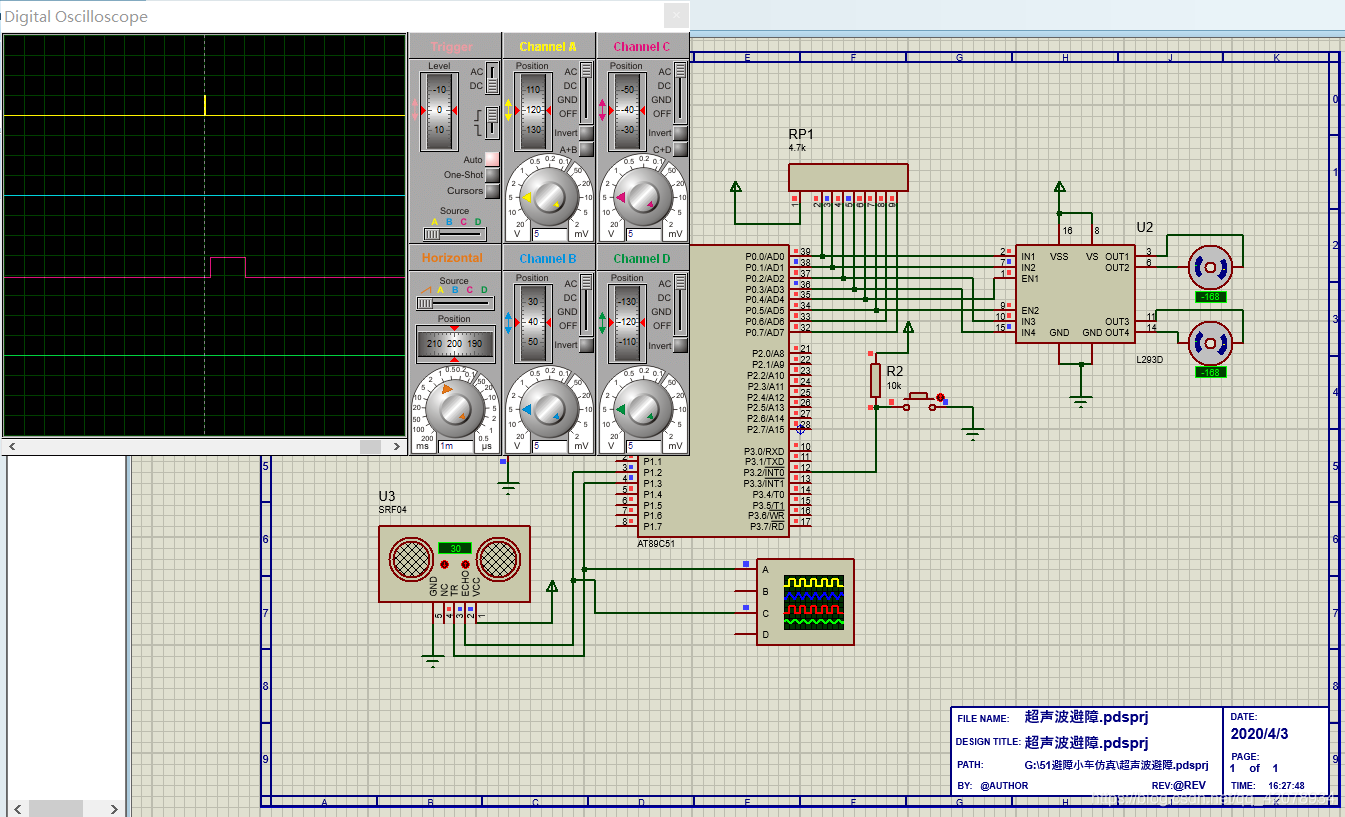
示波器可以辅助我们调试程序和仿真,关于在Proteus里调用示波器以及示波器的使用,我不做介绍,很多资料都能查到,本例中我运用示波器观察超声波模块的TR引脚和ECHO引脚的波形。
超声波模块原理图
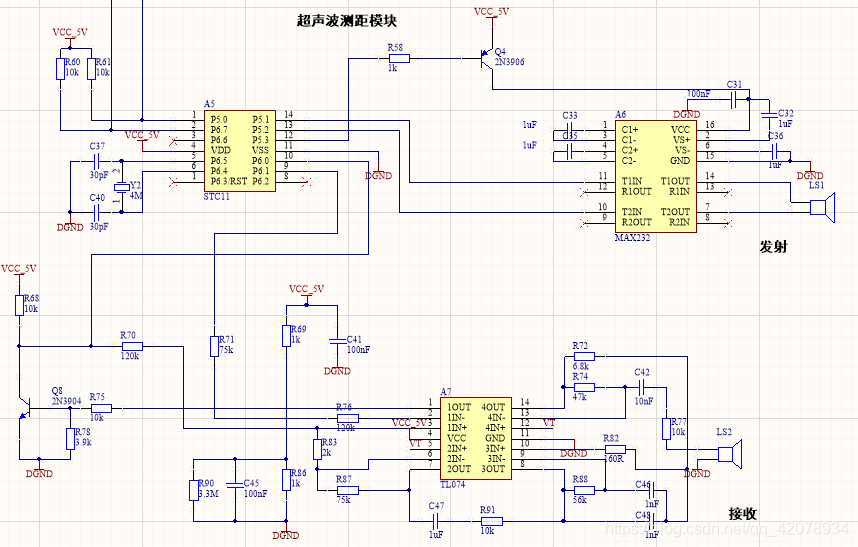
电机驱动模块原理
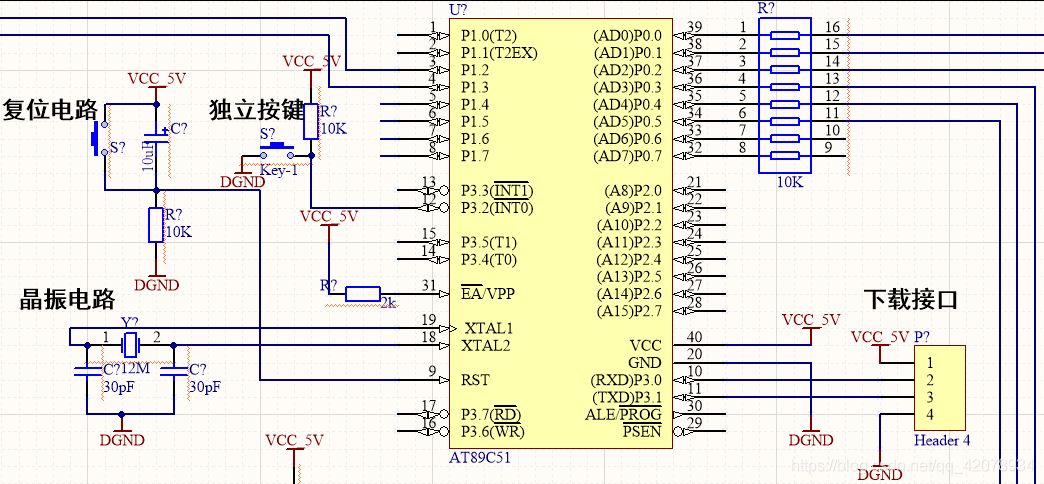
单片机最小系统
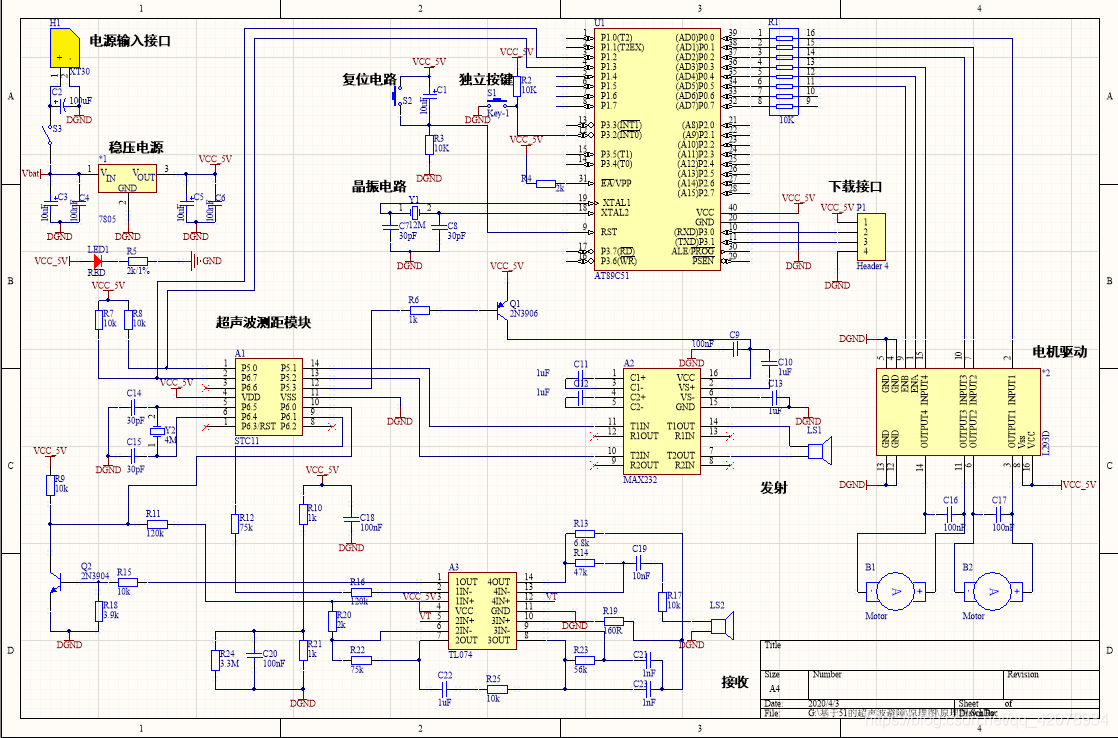
总原理图
51程序
#include
#include =5000)||flag==1)//超出测量范围
{
flag=0;
}
else
{
disbuff[0]=S%10;
disbuff[1]=S/10%10;
disbuff[2]=S/100%10;
disbuff[3]=S/1000;
}
}
void zd0() interrupt 3//T0中断用来计数器溢出,超过测距范围
{
flag=1;
RX=0;
}
void Timer_Count(void)
{
TR1=1;//开启计数
while(RX);//当RX为1计数并等待
TR1=0;//关闭计数
Conut();//计算
}
void StartModule()//启动模块
{
TX=1;//启动一次模块
Delay10us(2);
TX=0;
}
void main(void)
{
unsigned char i;
unsigned int a;
Delay1ms(400);
Delay1ms(5);
TMOD=TMOD|0x10;
EA=1;
TH1=0;
TL1=0;
ET1=1;
turn_right_flag=0;
B: for(i=0;i<50;i++)//判断k3是否按下
{
Delay1ms(1);
if(P3_2!=0 )
goto B;
}
while(1)
{
RX=1;
StartModule();
for(a=951;a>0;a--)
{
if(RX==1)
{
Timer_Count();
}
}
}
}

评论(0)
您还未登录,请登录后发表或查看评论