

本人为了对比研究三大经典SLAM算法(Gmapping、Cartographer、Hector)的优缺
因此考虑在Turtlebot3仿真环境下对这三个SLAM算法进行测试。
没想到测试第一个算法(Google的cartographer)就花了我将近一天的时间,现在把个人实现过程记录下来。
一、环境准备
ubuntu16.04 + ROSkinetic版本
如果只想跑下google的cartographer 算法的 看本篇
如果想cartographer算法结合Turtlebot3上的仿真实现的 建议直接看中下篇
二、最简单跑起来cartographer算法的安装方法(建议人群:只想跑cartographer)
先甩一个链接https://www.cnblogs.com/hitcm/p/5939507.html 感谢 hitcm大神的贡献
同时借鉴了https://blog.csdn.net/xmy306538517/article/details/81455625
自己测试了下,果然一遍测试成功
1. 安装依赖项
sudo apt-get install -y google-mock libboost-all-dev libeigen3-dev libgflags-dev libgoogle-glog-dev liblua5.2-dev libprotobuf-dev libsuitesparse-dev libwebp-dev ninja-build protobuf-compiler python-sphinx ros-kinetic-tf2-eigen libatlas-base-dev libsuitesparse-dev liblapack-dev2.安装ceres solver 版本1.11
git clone https://github.com/hitcm/ceres-solver-1.11.0.git
cd ceres-solver-1.11.0
mkdir build
cd build
cmake ..
make -j4
sudo make install3.安装cartographer
git clone https://github.com/hitcm/cartographer.git
cd cartographer
mkdir build
cd build
cmake .. -G Ninja
ninja
ninja test
sudo ninja install4.安装cartographer_ros
#初始化工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
echo "source catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
#安装cartographer_ros
cd ~/catkin_ws/src
git clone https://github.com/hitcm/cartographer_ros.git
cd ~/catkin_ws
catkin_make5.数据测试下载
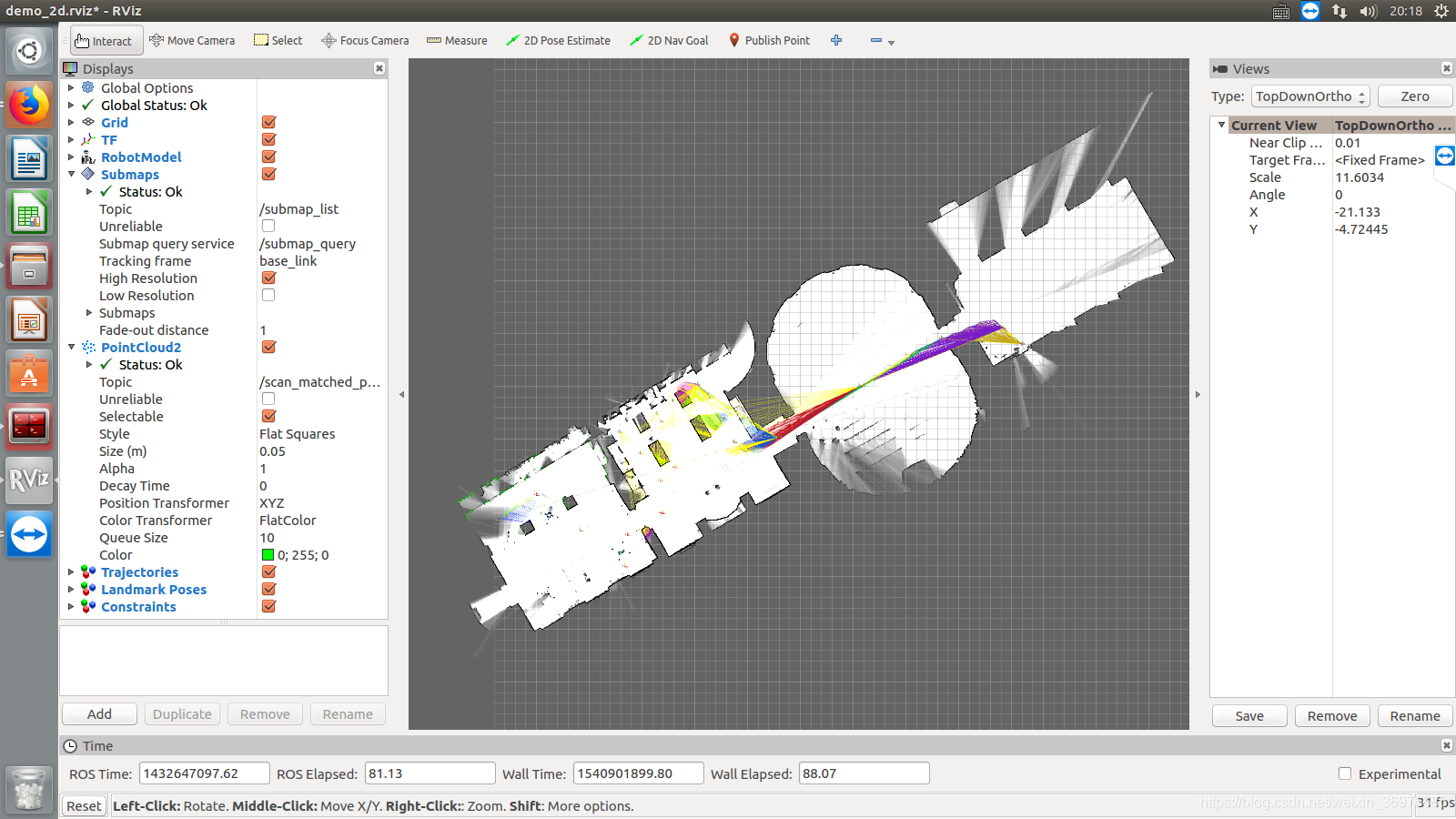
2D例程运行:
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag3D例程运行
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/cartographer_3d_deutsches_museum.bag运行效果:



评论(0)
您还未登录,请登录后发表或查看评论