
机器人标准DH模型建立方法-类比法
Puma560机器人标准DH参数表如下所示
Theta:关节转角
D:连杆偏移量
A:连杆长度
Alpha:连杆扭转角
theta d a alpha
1 q1 0.0000 0.0000 90
2 q2 0.0000 0.4318(a2) 0
3 q3 0.1500(d3) 0.0203(a3) -90
4 q4 0.4318(d4) 0.0000 90
5 q5 0.0000 0.0000 -90
6 q6 0.0000 0.0000 0
Puma560机器人模型如下图示
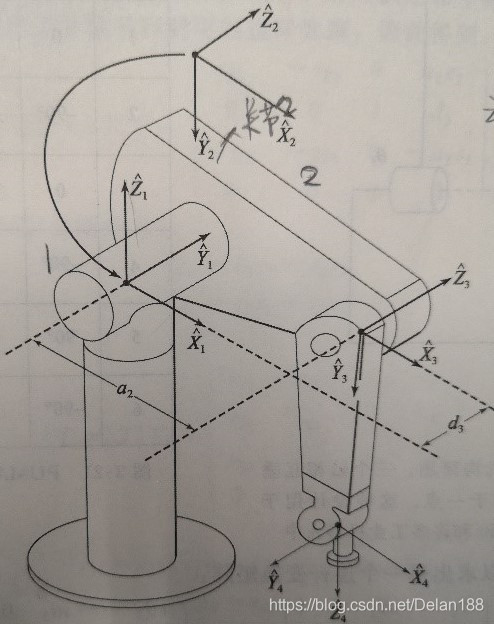

参照puma560的机器人模型,观察Staubli TX90机器人模型,模型如下图示:
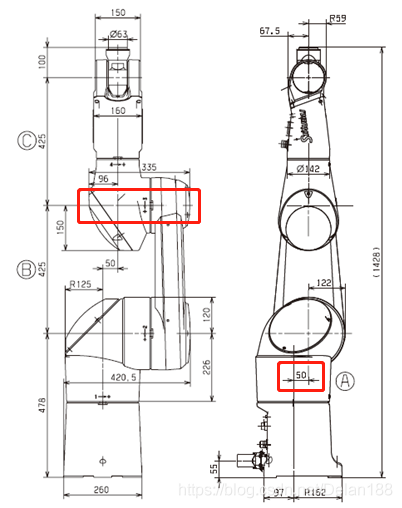
通过对比puma560机器人与Staubli机器人的类型相同,不同点在于staubli机器人的关节1的Z轴与关节2的Z轴有一个50mm的偏距,此偏距值为staubli机器人的a1;staubli机器人的关节3的Z轴与关节4的Z轴在同一平面内,而p560的关节4的Z轴相对于关节3的Z轴向上偏移了一个a3的距离,因此,staubli机器的d3值为0,而p560的a3值存在一个值。
因此,可写出staubli机器人的标准DH参数表如下:
theta d a alpha
1 q1 0.0000 -0.0500 90
2 q2 0.0000 0.4250(a2) 0
3 q3 0.0500(d3) 0.0000(a3) -90
4 q4 0.4250(d4) 0.0000 90
5 q5 0.0000 0.0000 -90
6 q6 0.0000 0.0000 0
由上可得到DH参数表中变化的仅有,增加了a1值,取消了a3值,更改了a2,d3,d4的值。
可用matlab中peter机器人工具箱所带的函数进行DH参数得到验证,得到staubli机器人模型如下图:
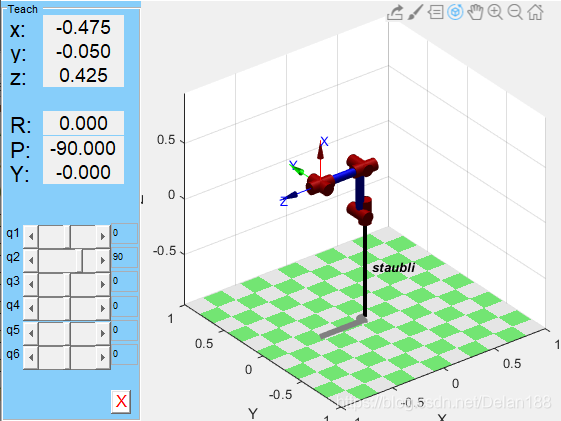
唯一有何实际情况不符合的示,matlab建立的机器人基坐标的的X方向与Y方向与实际的机器人基坐标系方向相反。但是此时的机器人关节转角状态是最符合实际机器人的状态。
由此,再拿出一个机器人模型,我们可以直直接写出它的标准DH参数,下图示为Estun机器人,Estun机器人是国产机器人三大巨头之一,机器人整体性能较好,大家可以自己尝
试着写一下;





评论(0)
您还未登录,请登录后发表或查看评论