

NAV350简介
NAV系列激光传感器有4个型号,他们的区别在于:NAV310输出原始数据,适合SLAM自然轮廓导航(与LMS511差不多)、NAV340和NAV245输出反射板的坐标,厂家自己做定位算法、而NAV350直接输出传感器自己的位姿坐标,用户不需要编程就可以直接用来给AGV定位。NAV350是专门用于反射板定位的,其最大扫描距离可达70米(NAV310最远可达280米),如下图所示。NAV350是为室内应用设计的,最大光照强度(80000Lux),室外正午阳光直射可能超过这个值因此就不能使用于室外了。扫描频率: 8 Hz,位置精度± 4 mm(10m范围内),角度精度± 0.1°(10m范围内)。NAV350扫描角度分辨率0.25°,角度精度±0.1°。
| 名称 | 型号 | 订货号 | 价格 |
| SICK激光传感器 | NAV350-3232 | 1052928 | 70000元 |
NAV350可以直接输出自身的位置和方向信息,这个与其它输出原始激光点坐标的传感器不同(例如SICK的LMS511、倍加福的R2000)。输出接口是标准以太网RJ45。
NAV350配置
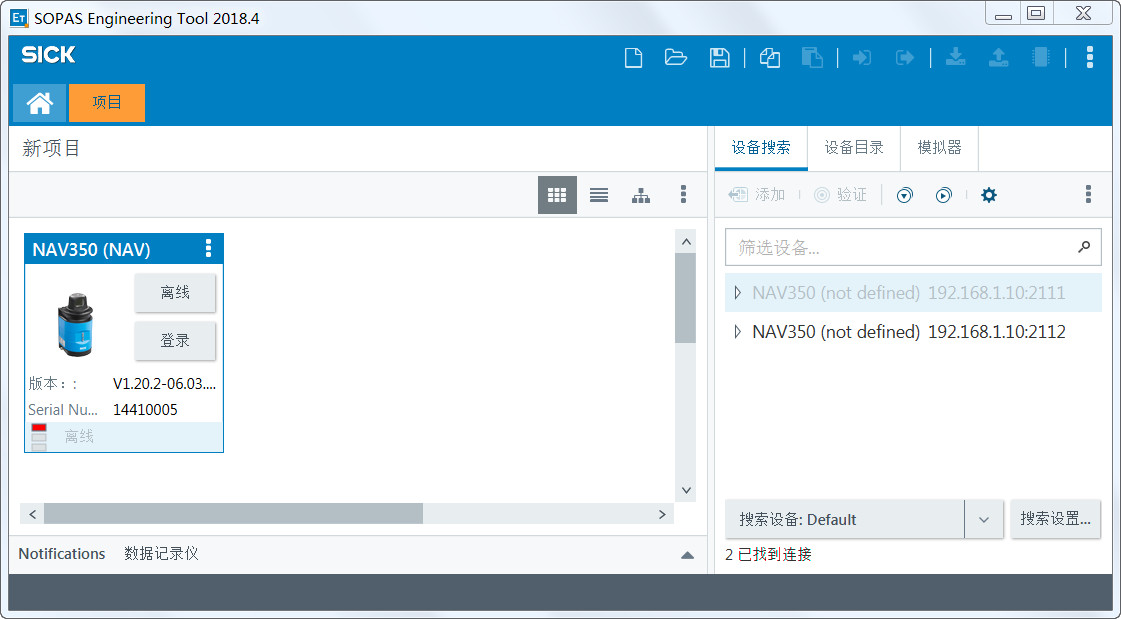
NAV350使用SOPAS软件进行配置,该软件可以在SICK官网下载,搜索SOPAS并下载第一个搜索到的条目即可,下载后打开SopasET.exe文件,界面如下。第一次连接传感器会提示没有安装驱动,这时点击传感器图标下面的提示,再选择“从设备上传”即可。
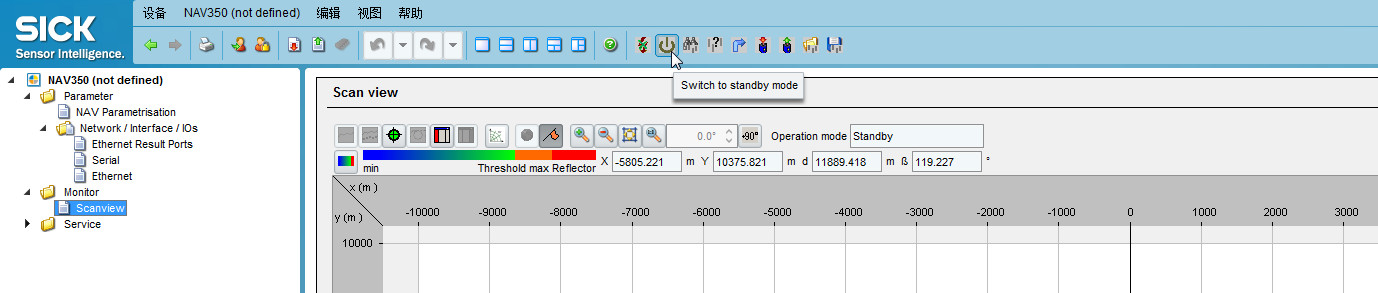
以授权用户身份用密码client登陆后,双击传感器图标进入下图所示的界面,然后点击下图中的图标将传感器切换到待机状态,传感器头部开始转动(头部不要受阻)。
切换到Landmark detection mode,点击show scan就可以看到扫描点了。

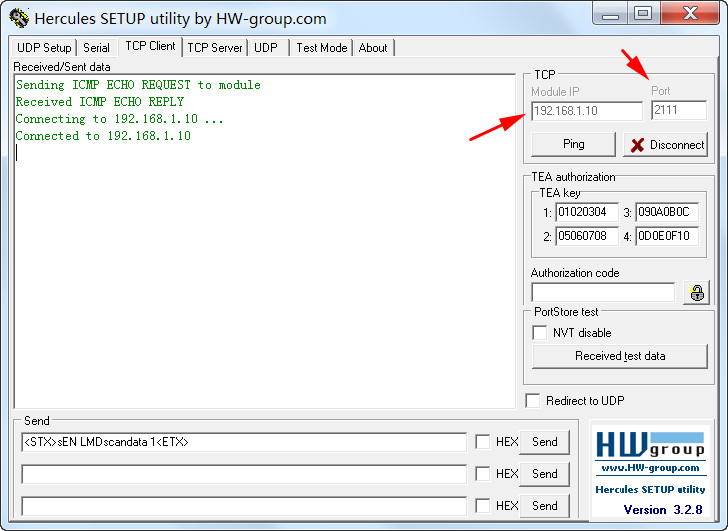
除了用SOPAS软件进行配置外,我们也可以通过命令行的方式与它通信。下载Hercules SETUP utility软件,进入TCP Client标签页,然后在其中设置传感器的IP地址(默认是192.168.1.10)和端口(默认是2111),如下图所示。然后点击Connect即可与传感器建立连接。在下面的Send输入框中输入相应的指令即可控制传感器。
例如输入:
<STX>sMN mNPOSGetData<ETX> 功能是获取单帧扫描数据
<STX>sEN LMDscandata 1<ETX> 功能是获取连续扫描数据
<STX>sEN LMDscandata 0<ETX> 功能是停止发送数据
注意尖括号中的内容也要输入。
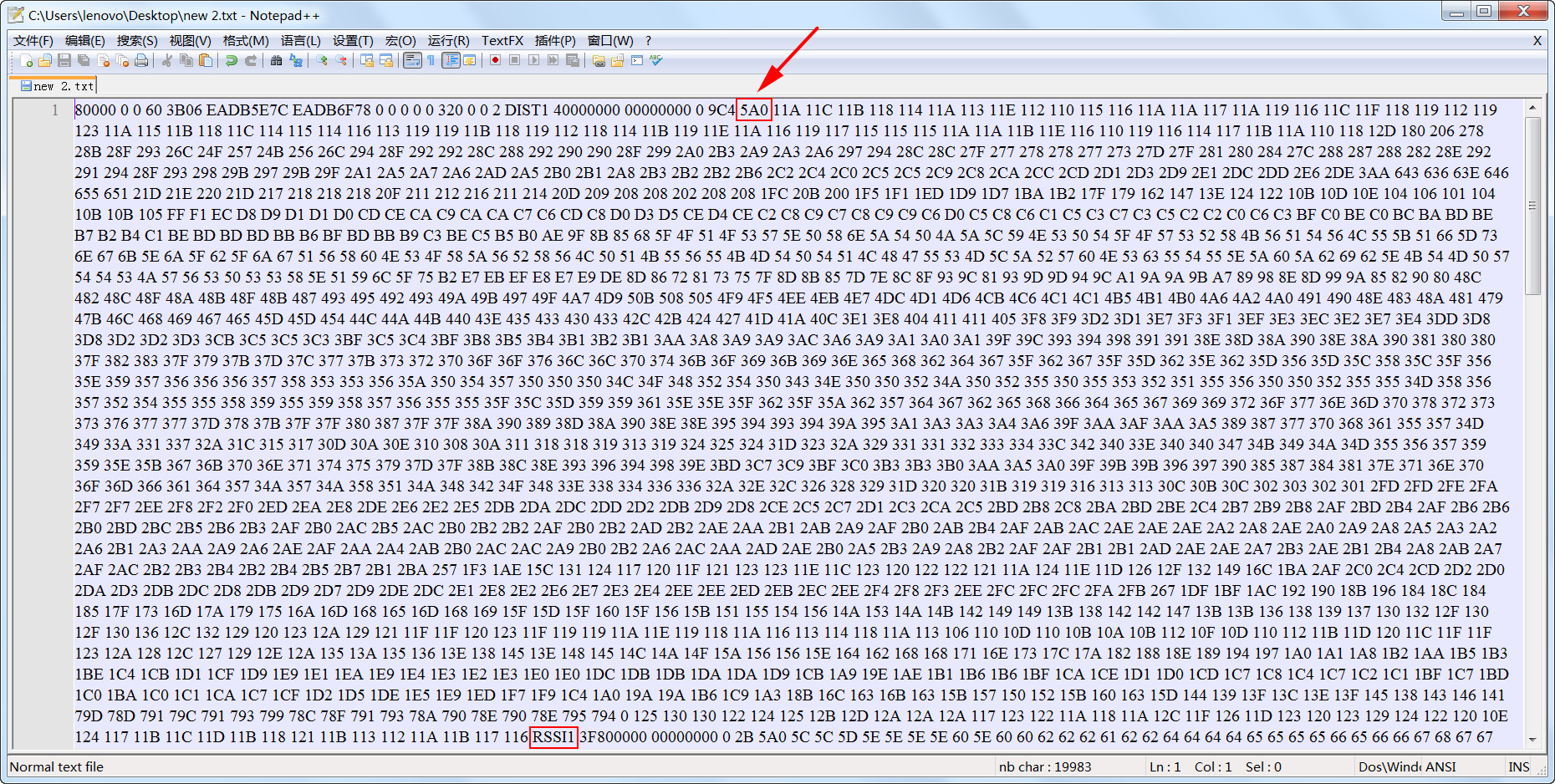
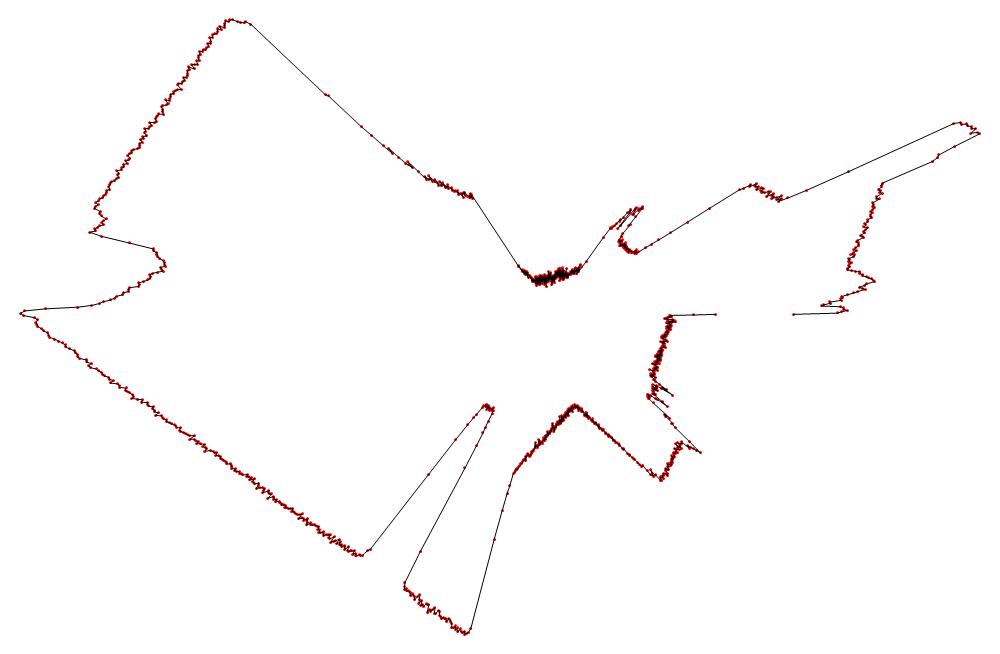
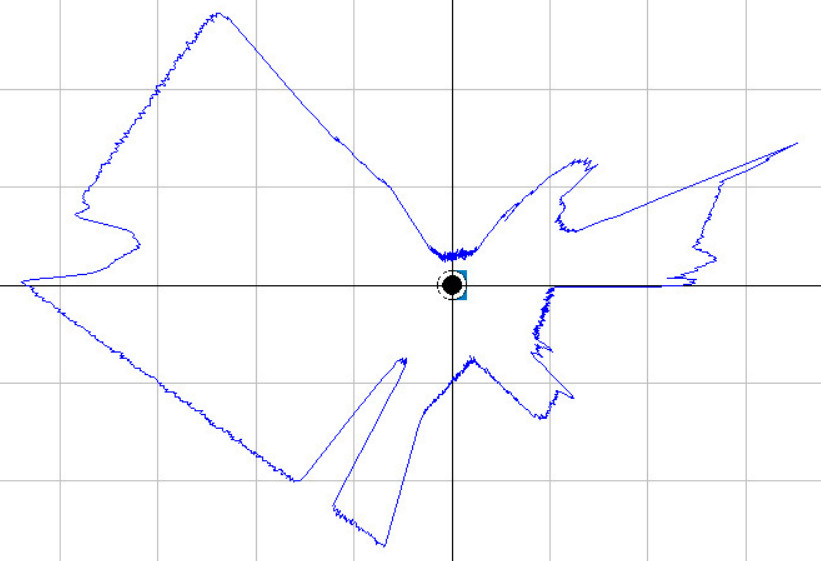
在Landmark detection mode模式下,传感器返回的数据可以被解析,每帧数据的格式可以参考官方报文手册第67页。其中,默认的是返回距离值。因为NAV350的分辨率是0.25°,每次扫描一周360°,所以返回的有效数据一共有360÷0.25=1440
360÷0.25=1440个,由于返回数据是十六进制,对应就是5A0。查阅手册我们知道,5A0和RSSI1这两个值之间的就是有效距离数据,刚好1440个。其它的数据则是传感器的配置参数。
用数学软件Mathematica画出来如下图左所示(Matlab也可以),与从SOPAS中看到的图形是对应的。
反射板的使用
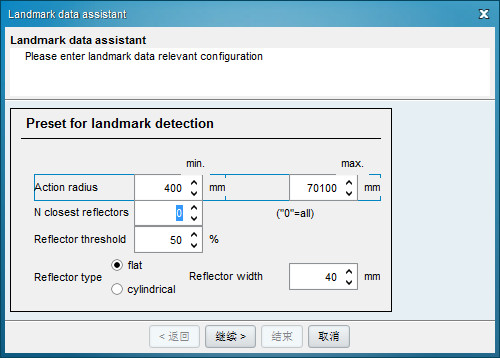
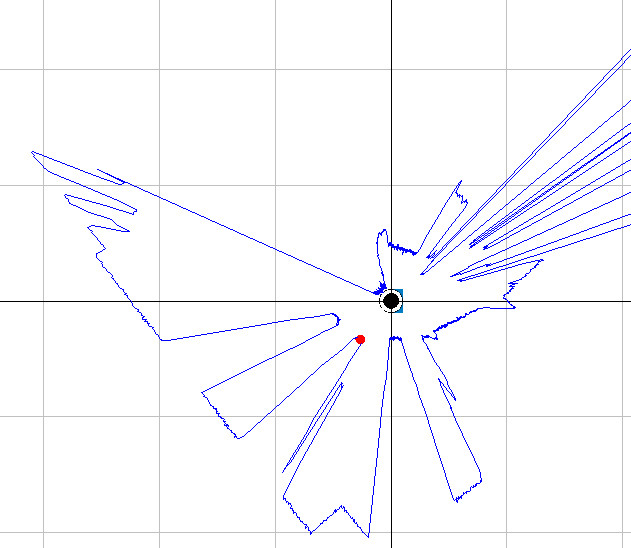
NAV350被设计为使用反射板定位,你可以使用平面反射板,也可以使用圆柱反射板。但是使用平面反射板的缺点是如果想对传感器的夹角过大就无法检测到了,而圆柱不管从哪个角度截面都是一个圆,因此推荐用圆柱反射板。而且反射板最好长一些(最好>50cm),防止传感器自身因为安装误差或者地面不平导致有角度倾斜而检测不到。例如检测距离在20米时的倾斜不能超过1.43°(arcsin(0.5/20)=1.43°)。圆柱的直径在75mm以上左右最好,传感器检测的是反射板的中心点,因此直径大一点小一点都不要紧。传感器能探测反射板的距离是400mm~70100mm,太近或者太远都检测不到,而且检测精度与距离有关系,10米以内精度最好。传感器定位需要至少三块反射板,四个反射板最好,不是越多越好。假如有个反射板距离传感器很远则会影响传感器的定位精度。反射板最好不要布置的太远。鼠标选中哪个反射板,该反射板在图像中显示为红色点,点击“show landmarks”图标即可看到,见下图。
获取实时位置和姿态指令:
<STX>sMN mNPOSGetPose 0<ETX> 功能是获取实时位置和姿态
返回示例:
sAN mNPOSGetPose 1 0 0 1 103 55 186A4 1 1 71147 1 1 E7000501 3 其中的位置和姿态值是103 55 186A4这三个值,其是16进制数字,将其转换成10进制为259 85 100004,其含义是传感器的位姿
(x,y,ϕ)=(259mm,85mm,100.004°)。手册[1]中的mgrad是指千分之一度。
参考资料
[1] Telegrams for Configuring and Operating the NAV350 Laser Positioning Sensor.


评论(0)
您还未登录,请登录后发表或查看评论