

通过前面的文章我们可以知道一个结论,无刷直流电机驱动是需要特定的通电换相,AB/AC/BC/BA/CA/CB->AB。通过这个通电相序可以使得BLDC按照顺时针方向旋转起来。那么我们应该在什么时候换相呢?这一节就梳理一下如何实现无刷直流电机的换相和调速。
引用第二节的一句话:当转子位置旋转到水平位置时,转子所受力矩为0,但是由于惯性的作用,此时电机的转矩会继续顺时针转动,如果在这个时候,将电流的方向反向,那么电机的转子将会继续按照顺时针转动。三相通电情况下,不存在水平位置,但是存在一个拟平衡状态。三相转子位置转到拟平衡状态时进行换相操作,因此,判定转子是否达到换相条件是这一节的关键点。
既然换相的实际取决于转子位置,那么如何实现转子位置检测呢?
1、通过霍尔信号检测转子位置
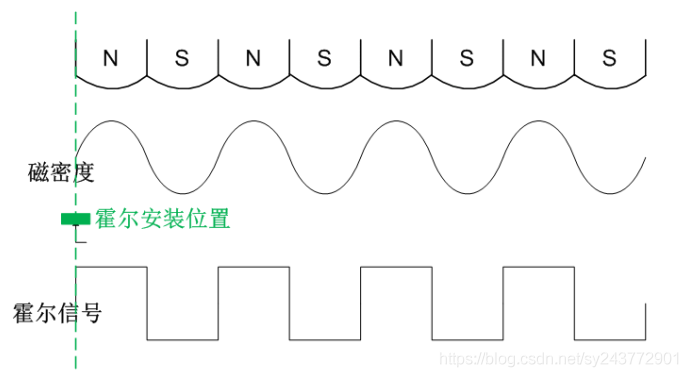
和有刷直流电机不同,BLDC电机的换向是以电子方式控制的。要使BLDC电机转动,必须按一定的顺序给定子绕组通电。为了确定按照通电顺序哪一个绕组将得电,知道转子的位置很重要。转子的位置由定子中嵌入的霍尔效应传感器检测。多数BLDC电机在其非驱动端上的定子中嵌入了三个霍尔传感器。每当转子磁极经过霍尔传感器附近时,他们便会发出一个高电平或低电平信号,表示N极或者S极正在经过该传感器,根据这三个霍尔传感器信号的组合,就能精确检测转子位置,决定换相的精确顺序。霍尔信号在电机运动中的变化过程如下图所示,当霍尔和电机在做相对运动时,会随着转子下磁通密度的变化,产生高低电平。(一般是N极为高电平,S极为低电平)
那么具体三相霍尔信号在一整个电角度周期的变化情况如何呢?具体情况如下图所示,霍尔会按照 【001 - 101 - 100 - 110 - 010 - 011】 - 001 -101 - 100 - - - - - - 六步变换,因此,根据三相霍尔信号可以检测出电机转子位置所处的扇区。根据霍尔信号指定的位置,可以指定开关序列。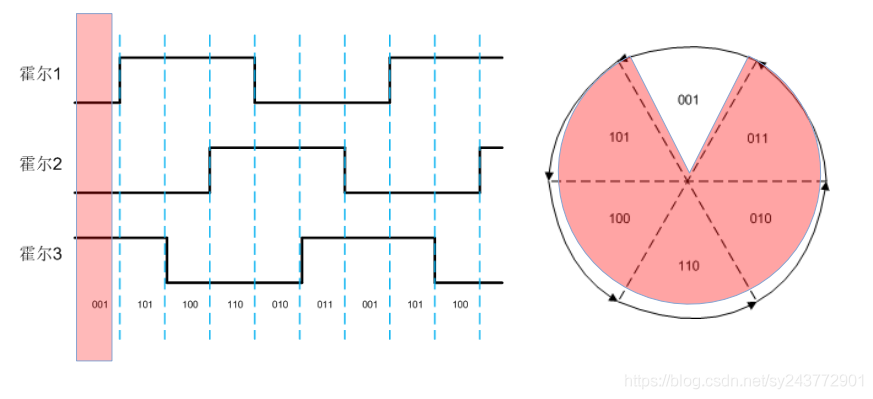
2 如何通过霍尔信号分配开关序列
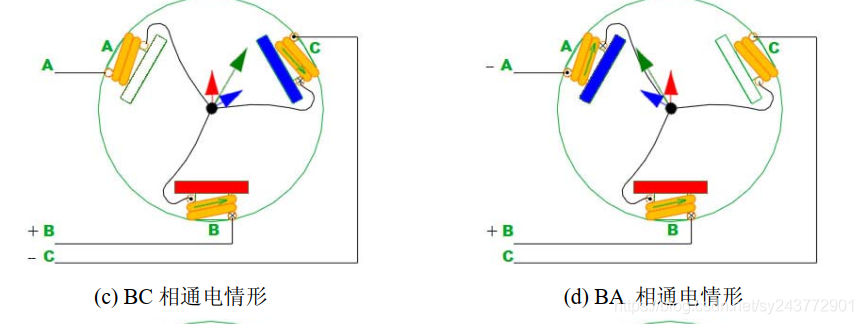
引用一下前面文章阐述的六种通电情况。一共有6种情况,AB\AC\BC\BA\CA\CB(这里需要注意一个点,AB和BA虽然都是A和B两相通电,但是电流方向不同,所以取得的效果也不同)。上述六种情况会产生六种不同的工作磁路,如下图所示。以其中一个为例进行分析,当AB通电时,且A为正极,B为负极,根据右手螺旋定则,A相产生的磁场方向如红色箭头所示,B相线圈产生的磁场方向如蓝箭头方向所示,那么电机就会产生绿色的箭头方向的合成磁动势。电机的永磁体转子就会向着绿色箭头所在位置旋转。在这六种状态中,按照特定的顺序切换,电机就会持续的旋转起来。(转子的位置就在中心)。可以发现,这六种开关序列产生的磁动势的位置就在两个扇区的交接点处。
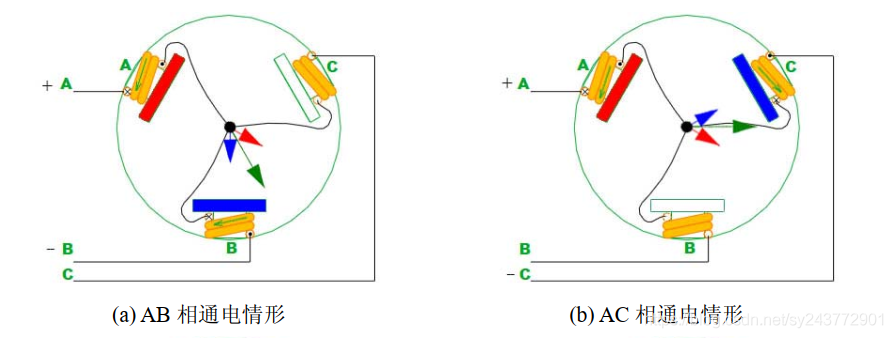
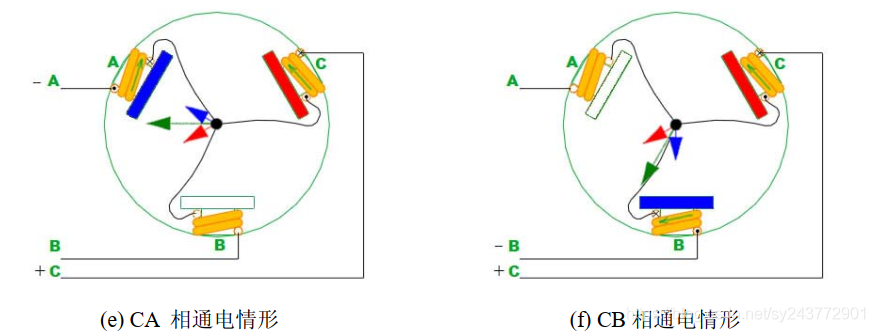
那么结合霍尔信号,该怎么匹配通电情况呢?那么假设当前霍尔信号为110,那么此时电机的转子位置就在上图所示的110区域,这个时候为了使得电机继续转动,需要一个位置处于110-010两个扇区临界点的磁动势,A+B- 产生的磁动势正好与此位置匹配。按照此原则,可以得到一个与霍尔相序对应的开关角表格。


这个开关角表格如下图所示:(注意啊,这里的开关表格仅适用于上图结构,也就是三相两极的BLDC,四极的与这个不一样,切记,为这个问题困扰了好久,后面4极的会单独讨论)

如果是反转,其分析过程与上面类似,当前霍尔信号为110,需要一个位置处于110-100 两个扇区临界点的磁动势,C+B-产生的磁动势正好与此位置匹配。按照此原则,也可以得到一个与霍尔相序对应的开关角表格。

通过上述两个表格,对电机的驱动信号进行分配,即可使得BLDC电机转动起来。
小结:
1、霍尔信号在电机运动中的变化过程如下图所示,当霍尔和电机在做相对运动时,会随着转子下磁通密度的变化,产生高低电平。
2、不同的电机位置需要不同的磁动势,因此可以将霍尔信号和通电相序匹配起来,得到换相表格,生成PWM驱动电机旋转。
相信经过这篇文章,铁汁们对这个BLDC的驱动逐渐有信心了吧,咱都已经知道你怎么动了,也知道怎么检测你转到哪里了,咱还知道了如何让你在特定的位置继续转下去的操作了,诶,那我不是一手即可掌握你了。其实梳理到这里,我心中已经大致有一个仿真搭建的思路了,毕竟驱动电机最难的一步就是如何给他供电嘛,后面控制怎么设计,那些怎么也比不上我现在能够让电机动起来来得喜悦呀。所以,下一节,咱们先把电机转起来,先爽一把再说。
补充一下:由于不同厂家提供的绕组和磁极位置排布不同,以上开关角表格也不同,但是分析原理是一致的。
整理不易,希望大家帮忙点个赞~



评论(0)
您还未登录,请登录后发表或查看评论