

文章目录
一、绘制scara机器人工作空间
二、MATLAB代码
一、绘制scara机器人工作空间
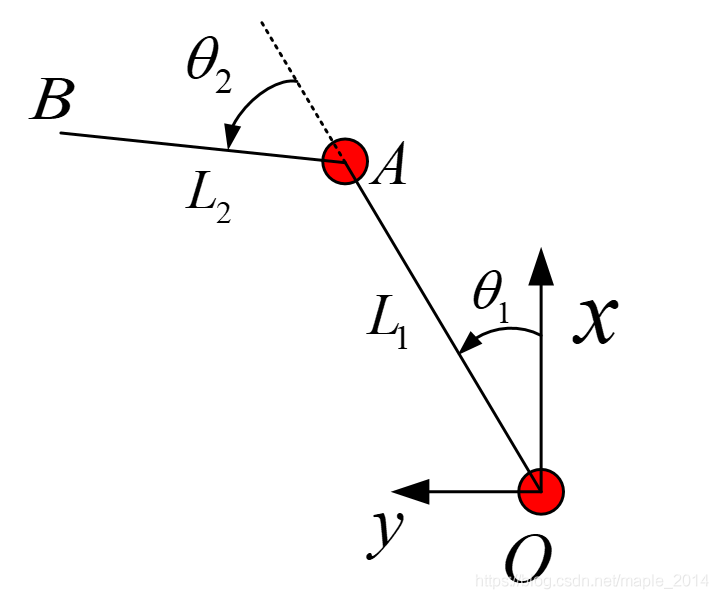
如上图,scara机器人大臂长 L 1 ,小臂长 L 2 , θ 1 为关节1角度, θ 2 为关节2角度,且 θ 1 ∈ [ θ L 1 , θ U 1 ] , θ 2 ∈ [ θ L 2 , θ U 2 ]
scara机器人工作空间由四段圆弧组成(如上图),圆弧方程如下:

其中,左手系时, θ = θ L 2 ;右手系时, θ = θ U 2 。
二、MATLAB代码 绘制2D圆弧:
%{
Function: draw_2d_arc
Description: 绘制平面圆弧
Input: 圆弧圆心(x0, y0),半径r,起始角度theta1(rad),结束角度theta2(rad), 曲线样式选择options
Output: 无
Author: Marc Pony(marc_pony@163.com)
%}
function draw_2d_arc(x0, y0, r, theta1, theta2, options)
deltaTheta = 0.1 * pi / 180;
theta = theta1 : deltaTheta : theta2;
x = x0 + r * cos(theta);
y = y0 + r * sin(theta);
plot(x, y, 'LineStyle', options.LineStyle, 'Color', options.Color, 'LineWidth', options.LineWidth);
axis equal;
end
绘制scara机器人工作空间:
%{
Function: draw_scara_workspace
Description: 绘制scara机器人工作空间
Input: 大臂L1,小臂L2,关节1限位角度thetaLimit1(rad),关节2限位角度thetaLimit2(rad),手系handcoor
Output: 无
Author: Marc Pony(marc_pony@163.com)
%}
function draw_scara_workspace(L1, L2, thetaLimit1, thetaLimit2, handcoor)
thetaL1 = thetaLimit1(1);
thetaU1 = thetaLimit1(2);
thetaL2 = thetaLimit2(1);
thetaU2 = thetaLimit2(2);
hold on;
if(handcoor == 1) %right handcoor
options.LineStyle = '-';
options.Color='g';
options.LineWidth = 3;
x0 = 0;
y0 = 0;
r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaU2));
alpha = acos((r^2 + L1^2 - L2^2) / (2 * r * L1));
thetaStart = thetaL1 + alpha;
thetaEnd = thetaU1 + alpha;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
x0 = 0;
y0 = 0;
r = L1 + L2;
thetaStart = thetaL1;
thetaEnd = thetaU1;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
x0 = L1 * cos(thetaU1);
y0 = L1 * sin(thetaU1);
r = L2;
thetaStart = thetaU1;
thetaEnd = thetaU1 + thetaU2;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
x0 = L1 * cos(thetaL1);
y0 = L1 * sin(thetaL1);
r = L2;
thetaStart = thetaL1;
thetaEnd = thetaL1 + thetaU2;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
title('Workspace in right handcoor', 'fontsize', 16);
else %left handcoor
options.LineStyle = '-';
options.Color='b';
options.LineWidth = 3;
x0 = 0;
y0 = 0;
r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaL2));
alpha = acos((r^2 + L1^2 - L2^2) / (2 * r * L1));
thetaStart = thetaL1 - alpha;
thetaEnd = thetaU1 - alpha;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
x0 = 0;
y0 = 0;
r = L1 + L2;
thetaStart = thetaL1;
thetaEnd = thetaU1;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
x0 = L1 * cos(thetaU1);
y0 = L1 * sin(thetaU1);
r = L2;
thetaStart = thetaU1 + thetaL2;
thetaEnd = thetaU1;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
x0 = L1 * cos(thetaL1);
y0 = L1 * sin(thetaL1);
r = L2;
thetaStart = thetaL1 + thetaL2;
thetaEnd = thetaL1;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
title('Workspace in left handcoor', 'fontsize', 16);
end
set(gcf, 'color', 'w');
axis off;
end
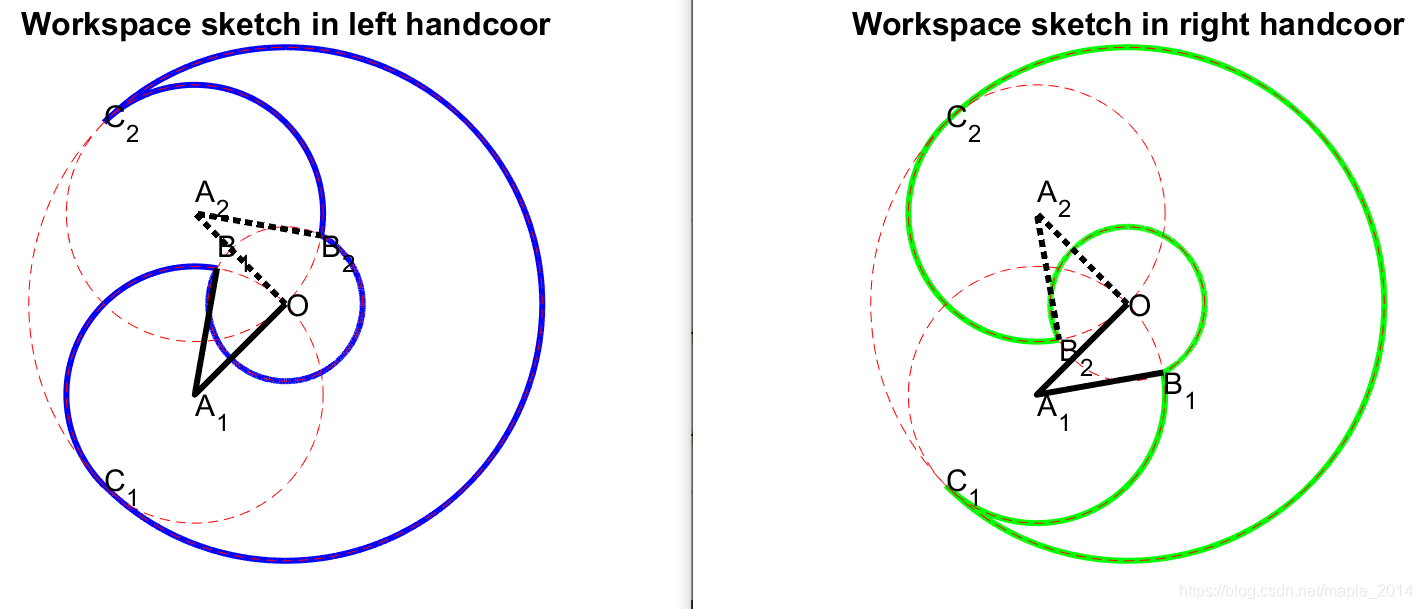
绘制scara机器人工作空间草图:
%{
Function: draw_scara_workspace_sketch
Description: 绘制scara机器人工作空间草图
Input: 大臂L1,小臂L2,关节1限位角度thetaLimit1(rad),关节2限位角度thetaLimit2(rad),手系handcoor
Output: 无
Author: Marc Pony(marc_pony@163.com)
%}
function draw_scara_workspace_sketch(L1, L2, thetaLimit1, thetaLimit2, handcoor)
thetaL1 = thetaLimit1(1);
thetaU1 = thetaLimit1(2);
thetaL2 = thetaLimit2(1);
thetaU2 = thetaLimit2(2);
hold on;
if(handcoor == 1) %right handcoor
options.LineStyle = '-';
options.Color='g';
options.LineWidth = 3;
x0 = 0;
y0 = 0;
r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaU2));
alpha = acos((r^2 + L1^2 - L2^2) / (2 * r * L1));
thetaStart = thetaL1 + alpha;
thetaEnd = thetaU1 + alpha;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
x0 = 0;
y0 = 0;
r = L1 + L2;
thetaStart = thetaL1;
thetaEnd = thetaU1;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
x0 = L1 * cos(thetaU1);
y0 = L1 * sin(thetaU1);
r = L2;
thetaStart = thetaU1;
thetaEnd = thetaU1 + thetaU2;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
x0 = L1 * cos(thetaL1);
y0 = L1 * sin(thetaL1);
r = L2;
thetaStart = thetaL1;
thetaEnd = thetaL1 + thetaU2;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
%-------------
options.LineStyle = '--';
options.Color='r';
options.LineWidth = 0.5;
x0 = 0;
y0 = 0;
r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaU2));
thetaStart = 0;
thetaEnd = 2 * pi;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
r = L1 + L2;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
x0 = L1 * cos(thetaU1);
y0 = L1 * sin(thetaU1);
r = L2;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
x0 = L1 * cos(thetaL1);
y0 = L1 * sin(thetaL1);
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
xA1 = L1 * cos(thetaL1);
yA1 = L1 * sin(thetaL1);
xB1 = xA1 + L2 * cos(thetaL1 + thetaU2);
yB1 = yA1 + L2 * sin(thetaL1 + thetaU2);
xA2 = L1 * cos(thetaU1);
yA2 = L1 * sin(thetaU1);
xB2 = xA2 + L2 * cos(thetaU1 + thetaU2);
yB2 = yA2 + L2 * sin(thetaU1 + thetaU2);
xC1 = (L1 + L2) * cos(thetaL1);
yC1 = (L1 + L2) * sin(thetaL1);
xC2 = (L1 + L2) * cos(thetaU1);
yC2 = (L1 + L2) * sin(thetaU1);
plot([0, xA1, xB1], [0, yA1, yB1], 'lineStyle', '-', 'color', 'k', 'lineWidth', 3);
plot([0, xA2, xB2], [0, yA2, yB2], 'lineStyle', ':', 'color', 'k', 'lineWidth', 3);
fontsize = 15;
delta = 25;
text(0, 0, 'O', 'Fontsize', fontsize);
text(xA1, yA1 - delta, 'A_1', 'fontsize', fontsize);
text(xB1, yB1 - delta, 'B_1', 'fontsize', fontsize);
text(xA2, yA2 + delta, 'A_2', 'fontsize', fontsize);
text(xB2, yB2 - delta, 'B_2', 'fontsize', fontsize);
text(xC1, yC1, 'C_1', 'fontsize', fontsize);
text(xC2, yC2, 'C_2', 'fontsize', fontsize);
title('Workspace sketch in right handcoor', 'fontsize', 16);
else %left handcoor
options.LineStyle = '-';
options.Color='b';
options.LineWidth = 3;
x0 = 0;
y0 = 0;
r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaL2));
alpha = acos((r^2 + L1^2 - L2^2) / (2 * r * L1));
thetaStart = thetaL1 - alpha;
thetaEnd = thetaU1 - alpha;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
x0 = 0;
y0 = 0;
r = L1 + L2;
thetaStart = thetaL1;
thetaEnd = thetaU1;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
x0 = L1 * cos(thetaU1);
y0 = L1 * sin(thetaU1);
r = L2;
thetaStart = thetaU1 + thetaL2;
thetaEnd = thetaU1;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
x0 = L1 * cos(thetaL1);
y0 = L1 * sin(thetaL1);
r = L2;
thetaStart = thetaL1 + thetaL2;
thetaEnd = thetaL1;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
%-------------
options.LineStyle = '--';
options.Color='r';
options.LineWidth = 0.5;
x0 = 0;
y0 = 0;
r = sqrt(L1 * L1 + L2 * L2 + 2 * L1 * L2 * cos(thetaL2));
thetaStart = 0;
thetaEnd = 2 * pi;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
r = L1 + L2;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options)
x0 = L1 * cos(thetaU1);
y0 = L1 * sin(thetaU1);
r = L2;
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
x0 = L1 * cos(thetaL1);
y0 = L1 * sin(thetaL1);
draw_2d_arc(x0, y0, r, thetaStart, thetaEnd, options);
xA1 = L1 * cos(thetaL1);
yA1 = L1 * sin(thetaL1);
xB1 = xA1 + L2 * cos(thetaL1 + thetaL2);
yB1 = yA1 + L2 * sin(thetaL1 + thetaL2);
xA2 = L1 * cos(thetaU1);
yA2 = L1 * sin(thetaU1);
xB2 = xA2 + L2 * cos(thetaU1 + thetaL2);
yB2 = yA2 + L2 * sin(thetaU1 + thetaL2);
xC1 = (L1 + L2) * cos(thetaL1);
yC1 = (L1 + L2) * sin(thetaL1);
xC2 = (L1 + L2) * cos(thetaU1);
yC2 = (L1 + L2) * sin(thetaU1);
plot([0, xA1, xB1], [0, yA1, yB1], 'lineStyle', '-', 'color', 'k', 'lineWidth', 3);
plot([0, xA2, xB2], [0, yA2, yB2], 'lineStyle', ':', 'color', 'k', 'lineWidth', 3);
fontsize = 15;
delta = 25;
text(0, 0, 'O', 'fontsize', fontsize);
text(xA1, yA1 - delta, 'A_1', 'fontsize', fontsize);
text(xB1, yB1 + delta, 'B_1', 'fontsize', fontsize);
text(xA2, yA2 + delta, 'A_2', 'fontsize', fontsize);
text(xB2, yB2 - delta, 'B_2', 'fontsize', fontsize);
text(xC1, yC1, 'C_1', 'fontsize', fontsize);
text(xC2, yC2, 'C_2', 'fontsize', fontsize);
title('Workspace sketch in left handcoor', 'fontsize', 16);
end
set(gcf, 'color', 'w');
axis off;
end
clc;
clear;
close all;
L1 = 200;
L2 = 200;
thetaLimit1 = [-135, 135] * pi / 180;
thetaLimit2 = [-145, 145] * pi / 180;
%% 画工作空间
figure(1);
handcoor = 0;
draw_scara_workspace(L1, L2, thetaLimit1, thetaLimit2, handcoor)
figure(2);
handcoor = 1;
draw_scara_workspace(L1, L2, thetaLimit1, thetaLimit2, handcoor)
%% 画工作空间草图
figure(3);
handcoor = 0;
draw_scara_workspace_sketch(L1, L2, thetaLimit1, thetaLimit2, handcoor)
figure(4);
handcoor = 1;
draw_scara_workspace_sketch(L1, L2, thetaLimit1, thetaLimit2, handcoor)


评论(1)
您还未登录,请登录后发表或查看评论