

Webots搭建麦克纳姆轮底盘教程
ubuntu版本:20.04
webots版本:2021a
ros版本:noetic
0.前言
之前笔者出过ROS联合webots开发教程,在教程中使用的是双轮差动底盘模型,今天笔者将带给笔者舵轮底盘的搭建教程。
注意:如果初学Webots搭建机器人,建议先从ROS联合webots实战案例(二)在webots中搭建机器人学起,这里面讲的比较详细。
1.真实模型
舵轮的其中一种结构如下图所示,但是不一定就只有这一种结构,还有很多结构能达到舵轮的要求。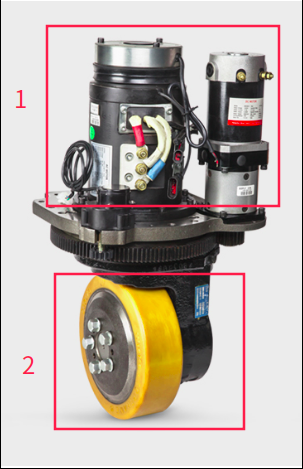
从图中可以看到,舵轮由两个电机组成,一个电机控制车轮的转向,另一个电机控制车轮的速度,因为可以控制车轮360度转向,所以也可以称舵轮为全向轮。
2.仿真搭建
- 创建一个机器人节点
Tree:Base nodes->Robot - 在Robot节点下创建一个长方体作为车身,车身的
shape为[0.5,0.07,0.3]Robot:Base nodes->solid solid:Base nodes->Shape - 为solid添加碰撞体积,和shape一样大
solid->boundingObject Box - 在
Robot节点下添加一个HingeJoint较链,并且添加Jointparameters和solid末端实物,因为有两个电机所以需要添加两个串行的铰链。搭建好的舵轮模型如下图所示:Robot->HingeJoint->Jointparameters|solid|motor
红色电机最好使用位置电机,紫色轮子使用旋转电机。 - 已经设置好了其中一个舵轮,其余三个舵轮都可以复制过去,然后设置电机的
Jointparameters!!!
注意:当要让机器人落地时,确保所有solid节点的碰撞体积和重力都已经设置好了,不然一运行就功亏一篑。
最终搭建效果:
3.编写ROS控制程序
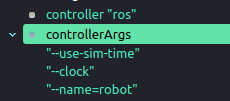
- 设置Webots机器人控制器为ROS,并且设置如下控制器参数:
- ROS控制器程序
#include <signal.h>
#include <std_msgs/String.h>
#include "ros/ros.h"
#include <webots_ros/set_float.h>
#include <webots_ros/set_int.h>
#include <webots_ros/Int32Stamped.h>
using namespace std;
#define TIME_STEP 32 //时钟
#define NMOTORS 4 //电机数量
#define MAX_SPEED 2.0 //电机最大速度
ros::NodeHandle *n;
static int controllerCount;
static std::vector<std::string> controllerList;
ros::ServiceClient timeStepClient; //时钟通讯客户端
webots_ros::set_int timeStepSrv; //时钟服务数据
ros::ServiceClient set_velocity_client;
webots_ros::set_float set_velocity_srv;
ros::ServiceClient set_position_client;
webots_ros::set_float set_position_srv;
ros::ServiceClient set_position_w_client;
webots_ros::set_float set_position_w_srv;
double speeds[NMOTORS]={0.0,0.0,0.0,0.0};// 四电机速度值 0~10
double angles[NMOTORS]={0.0,0.0,0.0,0.0};// 四电机角度值 -180~180
// 控制速度电机
static const char *motorNames[NMOTORS] ={"front_right_motor_2", "front_left_motor_2", "back_left_motor_2","back_right_motor_2"};
// 控制方向电机
static const char *anglesNames[NMOTORS] ={"front_right_motor_1", "front_left_motor_1", "back_left_motor_1","back_right_motor_1"};
/*******************************************************
* Function name :updateSpeed
* Description :将速度请求以set_float的形式发送给set_velocity_srv
* Parameter :无
* Return :无
**********************************************************/
void updateSpeed() {
for (int i = 0; i < NMOTORS; ++i) {
// 更新速度
set_velocity_client = n->serviceClient<webots_ros::set_float>(string("/robot/") + string(motorNames[i]) + string("/set_velocity"));
set_velocity_srv.request.value = speeds[i];
set_velocity_client.call(set_velocity_srv);
// 更新方向
set_position_w_client = n->serviceClient<webots_ros::set_float>(string("/robot/") + string(anglesNames[i]) + string("/set_position"));
set_position_w_srv.request.value = angles[i];
set_position_w_client.call(set_position_w_srv);
}
}
/*******************************************************
* Function name :controllerNameCallback
* Description :控制器名回调函数,获取当前ROS存在的机器人控制器
* Parameter :
@name 控制器名
* Return :无
**********************************************************/
// catch names of the controllers availables on ROS network
void controllerNameCallback(const std_msgs::String::ConstPtr &name) {
controllerCount++;
controllerList.push_back(name->data);//将控制器名加入到列表中
ROS_INFO("Controller #%d: %s.", controllerCount, controllerList.back().c_str());
}
/*******************************************************
* Function name :quit
* Description :退出函数
* Parameter :
@sig 信号
* Return :无
**********************************************************/
void quit(int sig) {
ROS_INFO("User stopped the '/robot' node.");
timeStepSrv.request.value = 0;
timeStepClient.call(timeStepSrv);
ros::shutdown();
exit(0);
}
/*******************************************************
* Function name :键盘返回函数
* Description :当键盘动作,就会进入此函数内
* Parameter :
@value 返回的值
* Return :无
**********************************************************/
void keyboardDataCallback(const webots_ros::Int32Stamped::ConstPtr &value)
{
// 发送控制变量
int send =0;
//ROS_INFO("sub keyboard value = %d",value->data);
switch (value->data)
{
case 314:
angles[0] = 1.5;
angles[1] = 1.5;
angles[2] = 1.5;
angles[3] = 1.5;
send=1;
break;
case 315:
speeds[0] = 10.0;
speeds[1] = 10.0;
speeds[2] = 10.0;
speeds[3] = 10.0;
send=1;
break;
case 316:
angles[0] = -1.5;
angles[1] = -1.5;
angles[2] = -1.5;
angles[3] = -1.5;
send=1;
break;
case 317:
speeds[0] = -10.0;
speeds[1] = -10.0;
speeds[2] = -10.0;
speeds[3] = -10.0;
send=1;
break;
case 70:
speeds[0] = -10.0;
speeds[1] = 10.0;
speeds[2] = -10.0;
speeds[3] = 10.0;
break;
case 32:
speeds[0] = 0;
speeds[1] = 0;
speeds[2] = 0;
speeds[3] = 0;
angles[0] = 0;
angles[1] = 0;
angles[2] = 0;
angles[3] = 0;
send=1;
break;
default:
send=0;
break;
}
if (send)
{
updateSpeed();
send=0;
}
}
int main(int argc, char **argv) {
std::string controllerName;
// 在ROS网络中创建一个名为robot_init的节点
ros::init(argc, argv, "robot_init", ros::init_options::AnonymousName);
n = new ros::NodeHandle;
// 截取退出信号
signal(SIGINT, quit);
// 订阅webots中所有可用的model_name
ros::Subscriber nameSub = n->subscribe("model_name", 100, controllerNameCallback);
while (controllerCount == 0 || controllerCount < nameSub.getNumPublishers()) {
ros::spinOnce();
ros::spinOnce();
ros::spinOnce();
}
ros::spinOnce();
// 服务订阅time_step和webots保持同步
timeStepClient = n->serviceClient<webots_ros::set_int>("robot/robot/time_step");
timeStepSrv.request.value = TIME_STEP;
// 如果在webots中有多个控制器的话,需要让用户选择一个控制器
if (controllerCount == 1)
controllerName = controllerList[0];
else {
int wantedController = 0;
std::cout << "Choose the # of the controller you want to use:\n";
std::cin >> wantedController;
if (1 <= wantedController && wantedController <= controllerCount)
controllerName = controllerList[wantedController - 1];
else {
ROS_ERROR("Invalid number for controller choice.");
return 1;
}
}
ROS_INFO("Using controller: '%s'", controllerName.c_str());
// 退出主题,因为已经不重要了
nameSub.shutdown();
// 初始化电机
for (int i = 0; i < NMOTORS; ++i) {
// position速度控制时设置为缺省值INFINITY
// 初始化四个控制位置的电机
set_position_client = n->serviceClient<webots_ros::set_float>(string("/robot/") + string(motorNames[i]) + string("/set_position"));
set_position_srv.request.value = INFINITY;
if (set_position_client.call(set_position_srv) && set_position_srv.response.success)
ROS_INFO("Position set to INFINITY for motor %s.", motorNames[i]);
else
ROS_ERROR("Failed to call service set_position on motor %s.", motorNames[i]);
set_velocity_client = n->serviceClient<webots_ros::set_float>(string("/robot/") + string(motorNames[i]) + string("/set_velocity"));
set_velocity_srv.request.value = 0.0;
if (set_velocity_client.call(set_velocity_srv) && set_velocity_srv.response.success == 1)
ROS_INFO("Velocity set to 0.0 for motor %s.", motorNames[i]);
else
ROS_ERROR("Failed to call service set_velocity on motor %s.", motorNames[i]);
// 初始化四个控制方向的电机
set_position_w_client = n->serviceClient<webots_ros::set_float>(string("/robot/") + string(anglesNames[i]) + string("/set_position"));
set_position_w_srv.request.value = INFINITY;
if (set_position_w_client.call(set_position_w_srv) && set_position_w_srv.response.success)
ROS_INFO("Position set to INFINITY for motor %s.", motorNames[i]);
else
ROS_ERROR("Failed to call service set_position on motor %s.", motorNames[i]);
}
// 服务订阅键盘
ros::ServiceClient keyboardEnableClient;
webots_ros::set_int keyboardEnablesrv;
keyboardEnableClient = n->serviceClient<webots_ros::set_int>("/robot/keyboard/enable");
keyboardEnablesrv.request.value = TIME_STEP;
if (keyboardEnableClient.call(keyboardEnablesrv) && keyboardEnablesrv.response.success)
{
ros::Subscriber keyboardSub;
keyboardSub = n->subscribe("/robot/keyboard/key",1,keyboardDataCallback);
while (keyboardSub.getNumPublishers() == 0) {}
ROS_INFO("Keyboard enabled.");
ROS_INFO("控制方向:");
ROS_INFO(" ↑ ");
ROS_INFO("← ↓ →");
ROS_INFO("刹车:空格键");
ROS_INFO("Use the arrows in Webots window to move the robot.");
ROS_INFO("Press the End key to stop the node.");
while (ros::ok()) {
ros::spinOnce();
if (!timeStepClient.call(timeStepSrv) || !timeStepSrv.response.success)
{
ROS_ERROR("Failed to call service time_step for next step.");
break;
}
ros::spinOnce();
}
}
else
ROS_ERROR("Could not enable keyboard, success = %d.", keyboardEnablesrv.response.success);
timeStepSrv.request.value = 0;
timeStepClient.call(timeStepSrv);
ros::shutdown();
return 0;
}
效果
结语
本文也是基于笔者的学习和使用经验总结的,主观性较强,如果有哪些不对的地方或者不明白的地方,欢迎评论区留言交流~
为了能和读者进一步讨论问题,建立了一个微信群,方便给大家解答问题,也可以一起讨论问题。
加群链接
✌Bye




评论(0)
您还未登录,请登录后发表或查看评论