

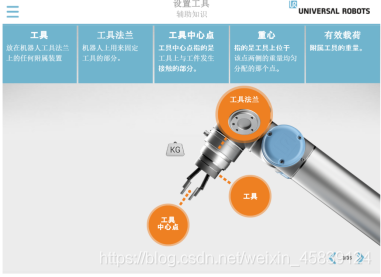
设置工具
3.1工具中心点配置:
找到工具中心点,重量,工具方向,输入错误将可能导致保护性停止


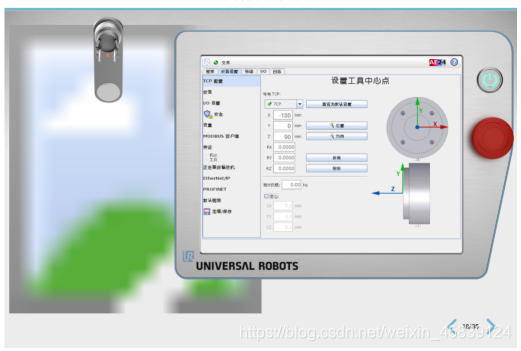
在示教器tcp上输入
工具中心点相对于法兰的位置,输入x,y,z
1.为机器人编程
2.安装设置选项卡
3.Tcp配置
4.将输入工具中心点到法兰的位置(z)
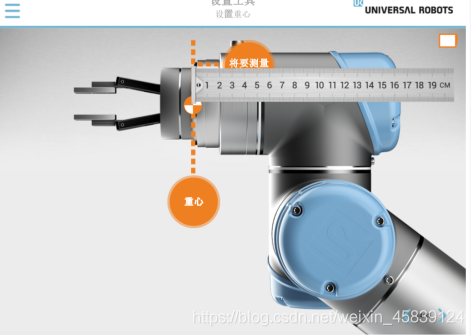
3.2有效载荷配置:
1.测量工具的重量

2.输入到有效负载,单击保存图标,之后保存按钮


3.3设置重心:1.测量距离
2.单击重心图标,输入cz并保存


x轴和y轴使用:(也可以机器人自己计算出来)
向左向右为x,向上向下,为y,y轴为远离工具连接器的那个轴线
3.4示教机器人工具中心点:
设置机器人工具中心点时:
1.单击位置按钮:
2.单击设置点1开始:
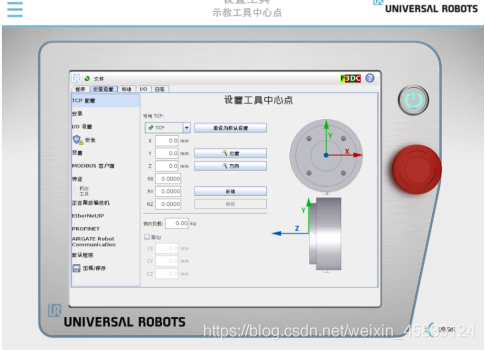
3.将工具中心点拖到某个点,单击示教器确认保存改点
4.单击设置点2,将工具中心点拖到另一个点,单击保存
5.直到四个都确认好,
6.单击设置按钮,软件根据四个点计算出工具中心点
7.然后点击加载/保存
3.5示教机器人工具的方向
有时候工具与z轴不平行,
1.单击方向按钮,单击下拉菜单,选择基座,单击设置点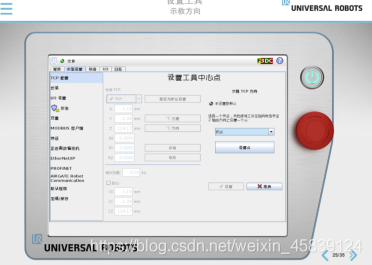
2.单击设置点拖动工具是工具z轴平行于基座z轴,(保证在俩个角度都平行于基座z轴)
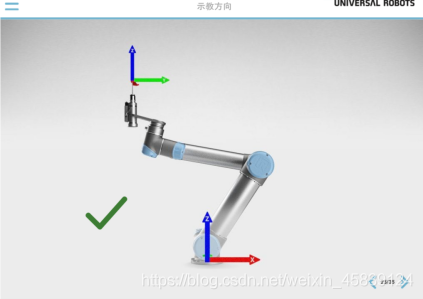
3.单击确认,使用该位置
4.单击设置按钮
5.单击保存图标,单击保存
")


评论(0)
您还未登录,请登录后发表或查看评论