

创建程序
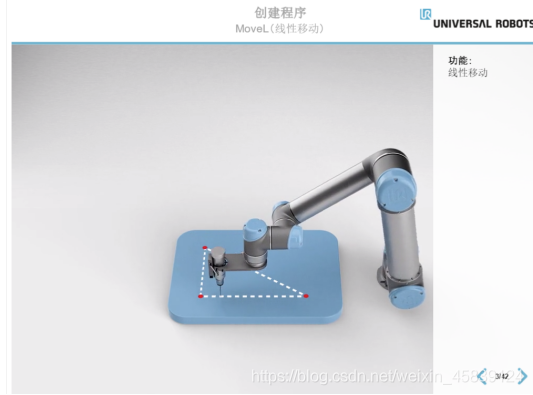
Move L,线性移动,向下抓取工件,向上拿取工件,从传送带清除,
Move G
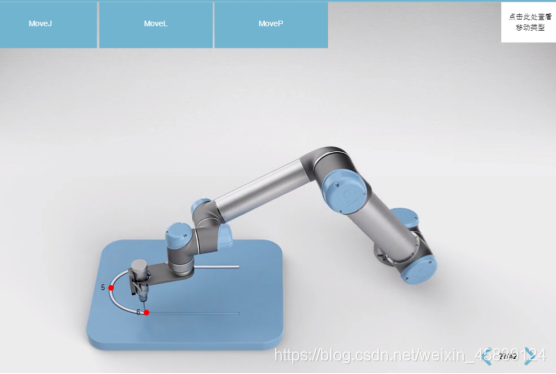
Move P在点胶工件上移动,恒定速度移动,没有锐角
在ployscope中创建程序:
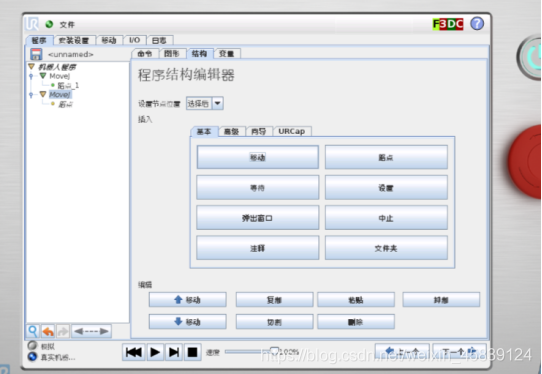
为机器人编程,空程序,单击结构选项卡
1.单击移动按钮,插入第一条命令
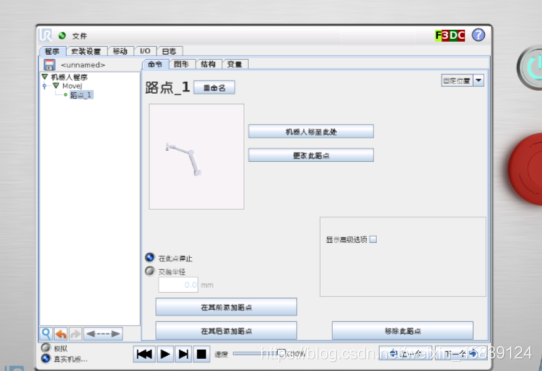
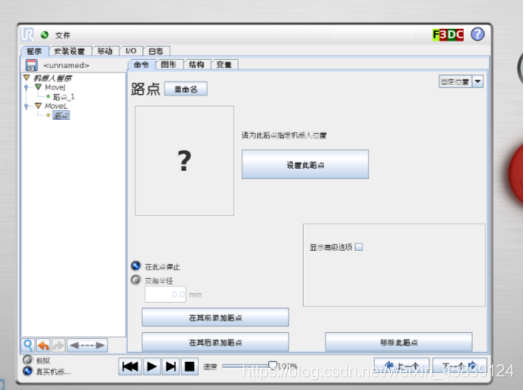
2.单击程序树中的路点,单击命令选项卡
3.设置此路点
4.将工具中心点拖动到第一个路点,单击示教器图标
5.单击确认,保存改路点
6.单击结构选项卡,确定下一个路点
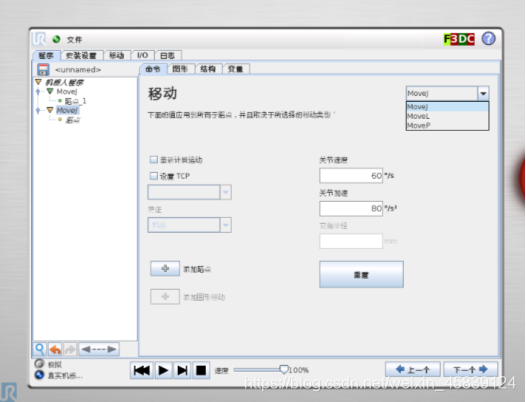
7.在程序树中单击movej,单击移动,插入下一个按钮
8.将movej改为movel,单击命令选项卡
9.在程序树中单击路点,设置路点位置,并单击设置此路点
10.将机器人拖动到下一个路点,单击确定,保存路点
11.添加相同路点,单击在其后添加路点,并设置此路点
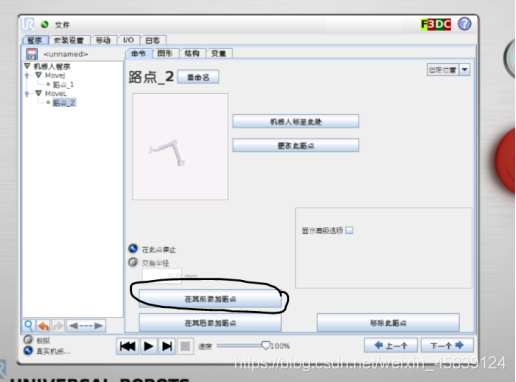
12.将机器人拖动到下一个路点,单击确认,保存改路点
13.单击结构选项卡,在程序树中单击movel,单击移动按钮,插入另一个命令
14.在程序树中单击新路点,单击命令选项卡
15.单击设置此路点,将机器人拖动到下一个路点,单击确认,保存改路点
16.单击程序树movej,单击结构,单击移动按钮,插入新命令
17.单击movej,单击命令选项卡,将movej更改为movel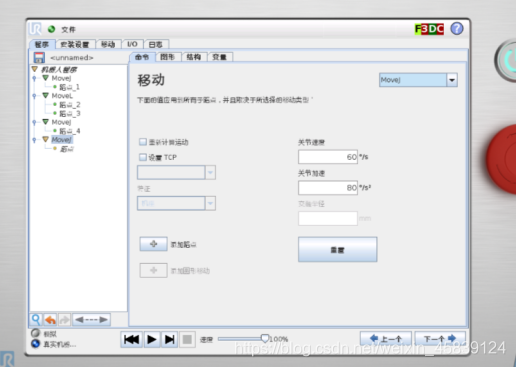
18.单击从程序树中路点,并设置此路点,将机器人拖动到下一个路点,单击确认,保存改路点
19.添加相同路点,单击在其后添加路点
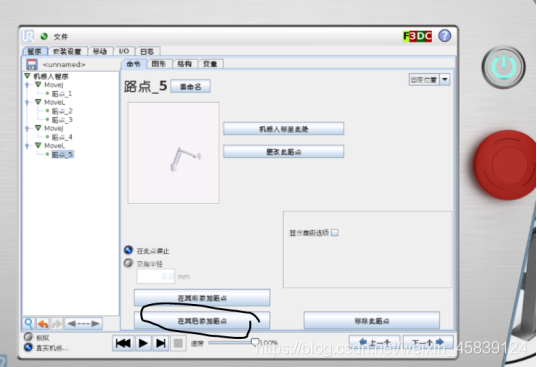
20.单击设置此路点,将机器人拖动到最后一个路点,单击确认,保存改路点。
设置完成
在movep可以添加圆形移动
1.在命令菜单中添加圆形移动
2.单击结构选项卡,带有向下箭头的移动命令,单击第一个路点配置,并设置此路点
3.将机器人工具中心点拖到圆形移动途径点,单击确认,保存改路点
4.在程序树中单击下一个路点,设置此路点,将工具中心点拖到圆形移动终点,单击确定保存改路点。
")


评论(0)
您还未登录,请登录后发表或查看评论