

一、配置
在kinetic版本无法直接通过apt-get安装descartes,因此直接下载源码到工作空间内编译使用(可去掉descartes_tests)。
git clone https://github.com/ros-industrial-consortium/descartes.git
二、解析
2.1 descartes简介
官方说明
Cartesian Planning: While MoveIt plans free space motion (i.e. move from A to B), Descartes plans robot joint motion for semi-constrained Cartesian paths (i.e. ones whose waypoints may have less than a fully specified 6DOF pose).
Efficient, Repeatable, Scale-able Planning: The paths that result from Descartes appear very similar to human generated paths, but without all the effort. The plans are also repeatable and scale-able to the complexity of the problem (easy paths are planned very quickly, hard paths take time but are still solved).
Dynamic Re-planning: Path planning structures are maintained in memory after planning is complete. When changes are made to the desired path, an updated robot joint trajectory can be generated nearly instantaneously.
Offline Planning: Similar to MoveIt, but different than other planners, Descartes is primarily focus逆解ed on offline or sense/plan/act applications. Real-time planning is not a feature of Descartes.
使用场景
可以设置以任何位置为起点进行规划,使用Moveit!规划的话只能以机械臂当前位姿为起点;
对多段轨迹结合规划,当调整其中一段轨迹时,会动态规划而不是全部重新规划;
对复杂轨迹的规划效果较Moveit!默认规划器更好;
测试说明
规划耗时较Moveit!默认规划器会长很多,大部分超过1s,无法用在实时驱动下;
规划时必须设置机械臂初始状态(以关节角度的形式而不是末端位姿),否则会因逆解多解产生规划起点与机械臂起点不一致的问题;
规划过程中会偶然出现某个点大幅度偏移规划轨迹(发生概率不高,可通过计算轨迹点间距离验证轨迹的有效性);
descartes可用在离线复杂轨迹规划下,完成轨迹的规划和优化后保存成bag或者其他文件,后续工作的时候加载发布即可;
2.2 接口说明
descartes_core

- descartes_moveit

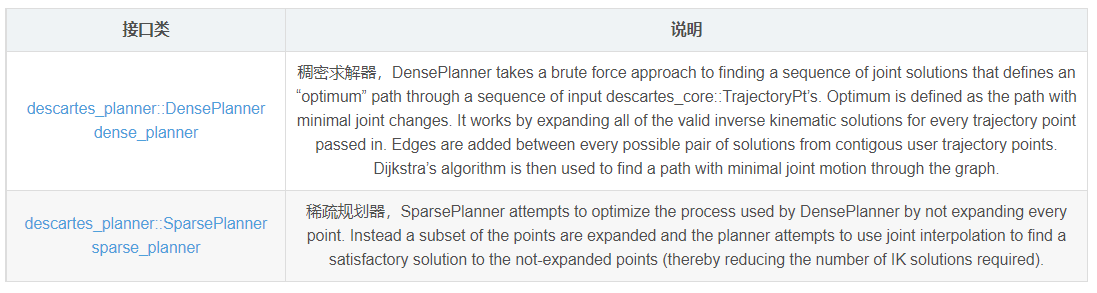
- descartes_planner
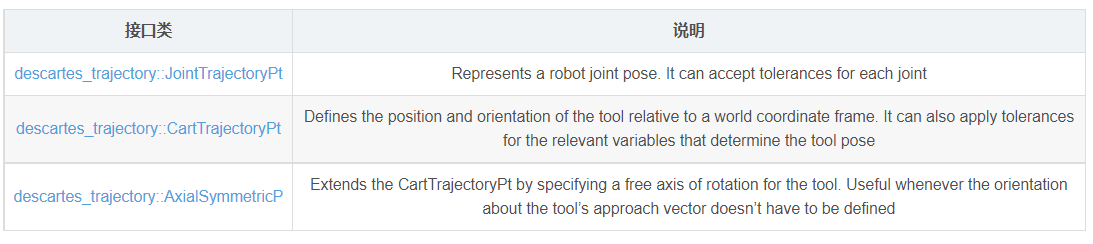
- descartes_trajectory
- descartes_utilities

-
三、应用
3.1 实现流程

-
3.2 相关函数
- 生成笛卡尔运动轨迹数据
-
descartes_core::TrajectoryPtPtr makeCartesianPoint(const Eigen::Isometry3d &pose) { using namespace descartes_core; using namespace descartes_trajectory; return TrajectoryPtPtr(new CartTrajectoryPt(TolerancedFrame(pose))); } - 转换规划数据到ROS格式
-
trajectory_msgs::JointTrajectory toROSJointTrajectory( const TrajectoryVec &trajectory, const descartes_core::RobotModel &model, const std::vector<std::string> &joint_names, double time_delay) { // Fill out information about our trajectory trajectory_msgs::JointTrajectory result; result.header.stamp = ros::Time::now(); result.header.frame_id = "base_link"; result.joint_names = joint_names; // For keeping track of time-so-far in the trajectory double time_offset = 0.0; // Loop through the trajectory int len = trajectory.size(); for (int i = 0; i < len; i++) { // Find nominal joint solution at this point std::vector<double> joints; trajectory[i].get()->getNominalJointPose(std::vector<double>(), model, joints); // Fill out a ROS trajectory point trajectory_msgs::JointTrajectoryPoint pt; pt.positions = joints; // velocity, acceleration, and effort are given dummy values // we'll let the controller figure them out pt.velocities.resize(joints.size(), 0.0); pt.accelerations.resize(joints.size(), 0.0); pt.effort.resize(joints.size(), 0.0); // set the time into the trajectory pt.time_from_start = ros::Duration(time_offset); // increment time time_offset += time_delay; result.points.push_back(pt); } return result; } -
参考
ros-descartesros-industrial-consortium-descartes
descartes_node
ROS 教程6 工业机器人实战 UR5机械臂 movieit仿真 轨迹规划 Descartes 笛卡尔 轨迹规划
descartes_tutorials
moveit_cartesian_plan_plugin(基于descartes构建的rviz规划插件)



评论(0)
您还未登录,请登录后发表或查看评论