

在使用moveit的逆解来对机械臂进行运动规划时候,是给机械臂输入末端的位置和姿态,其中位置是用x,y,z坐标来表示,姿态是使用四元数来表示。但是有时候想要根据机械臂目前的状态得到当前位姿,可以使用moveit的命令行工具或者直接在Rviz中查看。
命令行工具
首先启动MoveIt! 仿真环境接口,即自己使用的机械臂模型,例如:
roslaunch probot_anno_moveit_config demo.launch
启动moveit_commander命令行接口:
rosrun moveit_commander moveit_commander_cmdline.py与机械臂的move_group节点建立连接:
use <group name><group name>为自己程序中设置的,例如我的是manipulator
现在就可以在此节点上执行命令了,current命令将会返回运动组的当前状态。包括关节的状态(关节1, 2, 3, ……)和末端的状态(px, py, pz, ox, oy, oz, ow)
current可以看出当前状态信息:

Rviz中查看
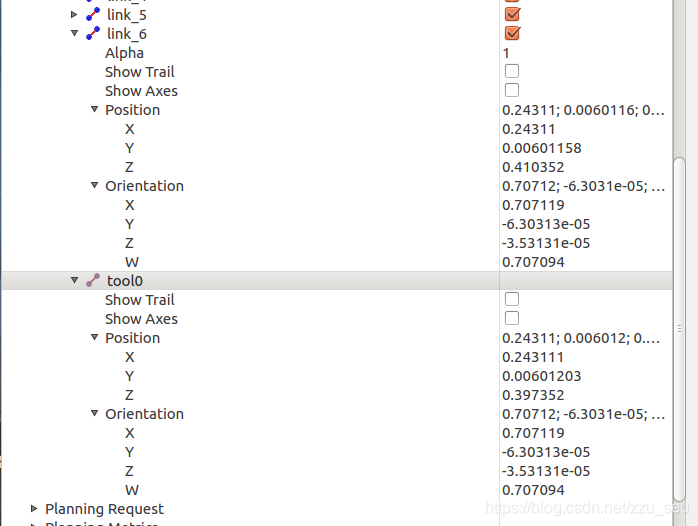
你也可以在Rviz中查看末端执行器的位置姿态。打开连接树:【MotionPlanning】->【Scene Robot】->【Links】,可以查看每个连杆的位置姿态。



评论(0)
您还未登录,请登录后发表或查看评论