

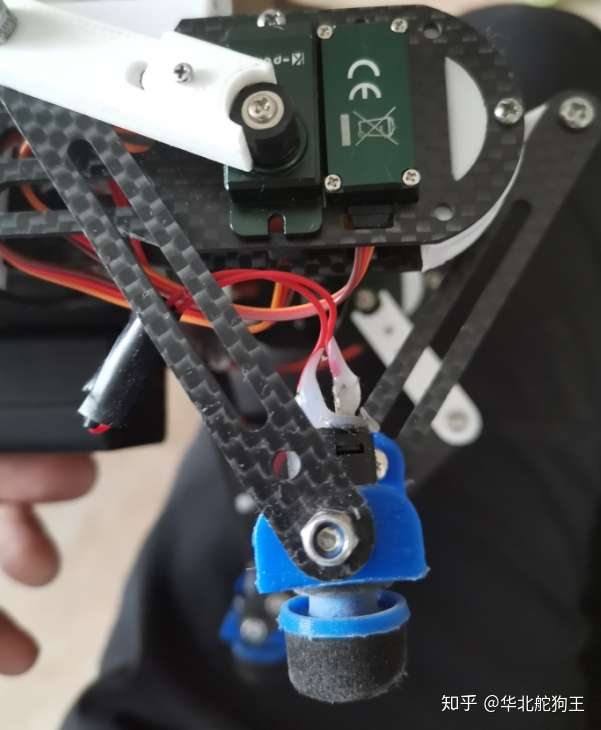
- 足底传感器
首先使用双面胶裁剪一小块贴在小圆片槽上以增加摩擦力

然后将其与开关对应凸出安装,并黏贴足底减震

首先采用下图的方式安装空槽足底件和两个小腿

从底部安装开关,并用对应塑料螺母固定

焊接转接板

使用4P线将其与控制器对应舵机口后的4P端子连接,走线可以从机臂空槽中过去(官方机架)

采用同样的方式安装4条腿,主要要保证软垫均朝向下方

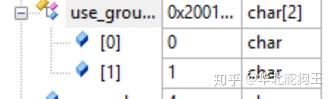
使能足底传感器首先需要查看vmc_all.ground结构体中各标志位是否按压后为1,要保证各开关能自如弹出恢复,之后修改use_ground_sensor为1,并采用陀螺仪标定写入FLASH
- 两轴云台
两轴云台首先需要在项目中打印对应3D文件并且另外购买两个舵机,首先安装俯仰轴舵机和底部的摇臂


之后在机器人上安装底座和航向轴舵机:

将该舵机信号线差如机头右上方剩余的PWM引脚上,在程序inculde.h文件中取消USE_GIMBAL的注释,上电让舵机恢复零位,之后将上部安装至底座上:
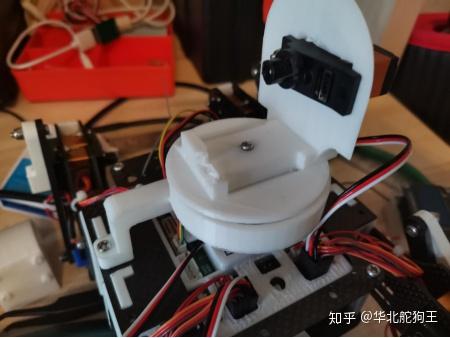
用螺丝固定上下部分同时将俯仰轴舵机连线插入左上方空缺PWM引脚,同理上电校准零位后安装摇臂,进一步将相机线从结构口槽中引出:
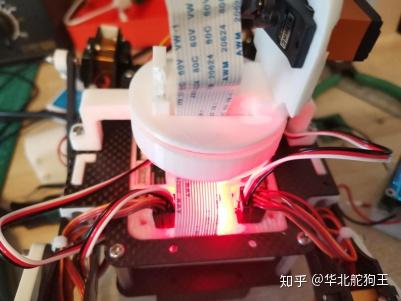
安装侧部固定件并拧入螺丝,安装相机模组:
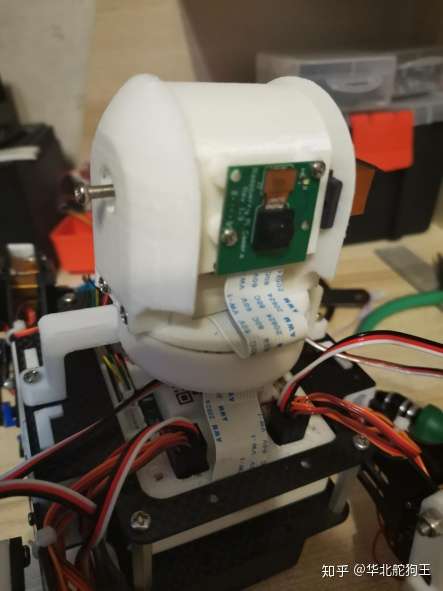
最终完成云台的安装:

此时当拨码1在右2在左时不再是车辆模式,遥杆直接控制云台的角度,对于安装带来的偏差可以在程序sdk文件中gimble_control里DEBUG修改gimble.off[PITr YAWr]
- 光流模块
- 避障模块
- 机械爪模块
- LED立方体模块
- UWB定位模块
- 自复位模块
- 自动充电模块



评论(0)
您还未登录,请登录后发表或查看评论