

前面我们分析了下UR跟Kuka机器人力控方面的工作,尤其是针对他们牵引示教这块。这类机器人我们都亲切地轻型协作机器人。但光是个牵引示教的功能,也不足以完全体现出“协作”这一理念。接下里,我们介绍三个更能体现人机协作的机器人工作场景。
- 场景一
机器人需要在机器视觉的辅助下,完成一个画圆的任务(红色虚线)。要完成这个任务,需要两个阶段:先让机器人进入相机视野内,再通过视觉伺服控制机器人末端完成轨迹跟踪的任务(画圆)。
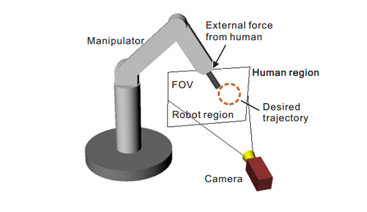
机器人若想凭着自己的智能进入相机视野,是一项艰难的工作;但这部分工作若由人牵引着完成则非常easy;若还让人牵引着画圆,则圆的精度难以保证,但这个时候,完全让机器人去画圆,则很容易保证精度。
小结下来,在相机视野之外属于human region,机器人这个时候要温顺地让人带着运动(相当于牵引示教),进入视野后,也即robot region,机器人要勇于挣脱人的束缚,自己去完成画圆任务。
- 场景二
机器人需要在一堆物品中抓取一个蓝色球体。要完成这个任务,需要两个阶段:先让机器人迅速运动到一堆物品的附近区域,再识别出目标物品进行抓取。
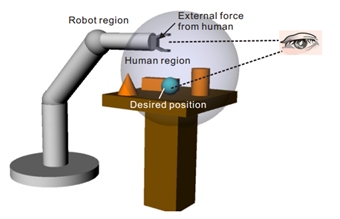
机器人完全可以凭着自己的能力,快速精确地运动到物品附近;机器人若想凭着自己的智能识别目标物体,是很困难的,但若让人拖着机器人去进行目标物体识别抓取,亦是非常easy的。
小结下来,在物体附近之外属于robot region,机器人自己要独立迅速的运动到物体附近;在附近后,也即human region,机器人要机智地放弃自主权,让人牵着他去识别并抓取目标物。
场景一二小结:人的优势在于智能,能在不确定的环境下完成任务,机器人的优势在于运动精度和重复性;人机协作要明确什么事让人做,什么事让机器做,结合各自优势,取长补短。
- 场景三
场景一二是工业领域的,场景三我们考虑日常民用中的一个例子——机器外骨骼。

如果外骨骼不能与人协作运动:一开始,我们会很新奇,觉得很好玩,我们不费力就能实现肢体运动;可久而久之,我们就会觉得别扭无聊,因为这个外骨骼是不听你指挥的,它按照预先设定的轨迹运动,你在他看来只是个傀儡,而当你要逆其意愿而为之时,它会无情的压制住你,让你乖乖按照他的意图。
要想受试者穿着舒适,外骨骼就不能一意孤行,它需要实时监测受试者的运动意图,服从穿戴者的意志。直接地,外骨骼要实时监测出受试者施加的关节力矩,并调整辅助力矩,完成期待的运动。

类比于人与机器人握手,若机器人一意孤行,分分钟能把人整惨。若机器人可实时感受人的握力及运动,并调整自身运动和输出力,则对方会惬意于此次握手,会觉得跟他握手的是一个和他一样的人。
——————————————分割线————————————
全文总结:人机协作要充分发挥出人的智能,机器人要具有良好的交互控制和力控制性能。




评论(0)
您还未登录,请登录后发表或查看评论