

一、概述
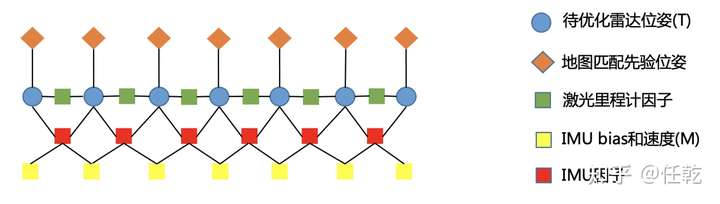
在第十和第十一这两篇文章中,虽然一直在介绍融合,但是各位应该也注意到了一点,就是这个融合是建图任务下的融合,主要原因是因为,那种一次性优化所有内容的融合方法(结构图如下),效率太低了,执行一次优化所需要的时间太长,所以它不适合用来做实时的定位,而建图任务是离线的,所以无所谓。
那么问题来了,在实时的定位中,这个融合该怎么做嘞?
二、滑动窗口简介
要解决上面的问题,有一个简单的思路,就是把老的关键帧从优化模型里剔除掉,因为它们已经被优化很多次了,再优化也不会有太大的变动。这时候,融合的结构图可以变成下面这样。
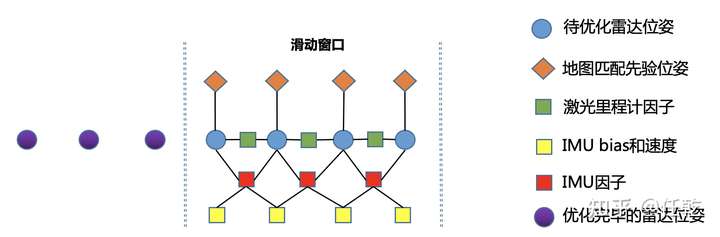
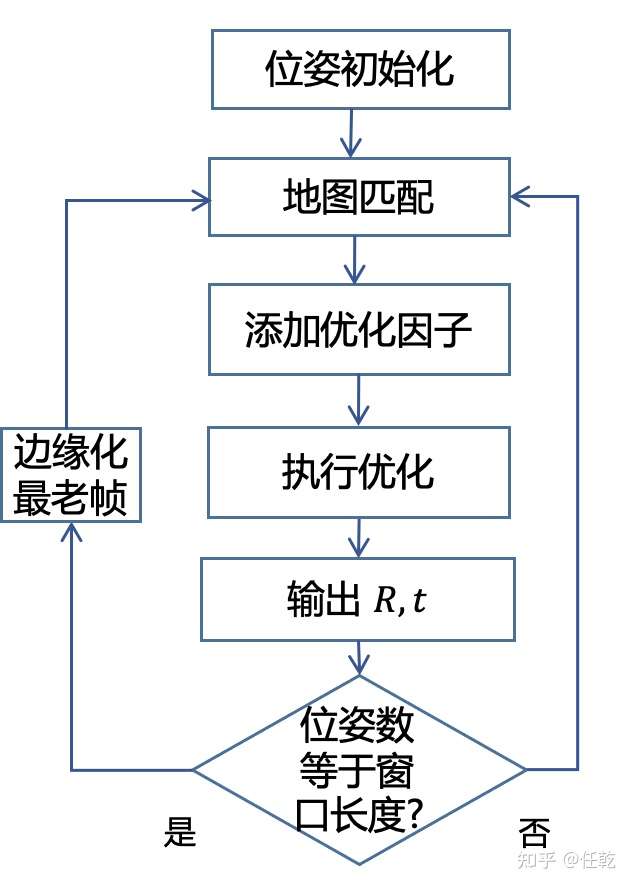
看起来好像解决了问题,但其实引入了一个新问题,那就是,窗口中只有新的帧,老的帧对新帧的约束随着老帧的删除就直接凭空消失了,这显然是不合理的。所以一个合理的滑动窗口,应该是在删除老的帧的同时,把它的约束也保留下来,这种行为叫做“边缘化”,它是一个很复杂的过程,放在后面介绍。此处暂且只理解这个东西的作用,并且明白它的使用流程(如下图)
三、边缘化原理
优化问题具有如下通用形式:
并可拆解成如下形式:
拆解的目的是通过一系列操作,把 (可以当作老的帧)从状态量里删除掉,并把它的约束保留下来。要做到这一步,需要用到舒尔补,我们在滤波器原理推导的时候介绍过这个概念,这里再回顾一下。
给定矩阵
它可以通过如下变换,变成上三角矩阵,即
其中, 称为
关于
的舒尔补。
拆解后的优化问题,可通过舒尔补对矩阵三角化,即
进一步化简得
此时,可以利用等式第2行直接得到
其含义为:此时可以不依赖 求解出
,若我们只关心
的值,则可以把
从模型里删除。
四、基于边缘化的滑动窗口实现
明白边缘化的原理以后,我们要看一下它是怎样能够解决滑动窗口里“删除老的帧但又保留它的约束”这个过程的。
首先需要换一种语言重新描述一下窗口模型。
1. 基于地图定位的滑动窗口模型
1)窗口优化模型构成
在优化模型中,优化问题可写成如下形式
其中 是残差,
是残差关于状态量的雅可比,
是信息矩阵。
在kitti工程中,基于地图定位的滑动窗口,其残差包括:
a.地图匹配位姿和优化变量的残差
b.激光里程计相对位姿和优化变量的残差
c.IMU预积分和优化变量的残差
d.边缘化形成的先验因子对应的残差
此处先介绍前3项,第4项待边缘化后介绍。
2)地图匹配位姿和优化变量的残差
该残差对应的因子为地图先验因子。一个因子仅约束一个位姿,其模型如下:
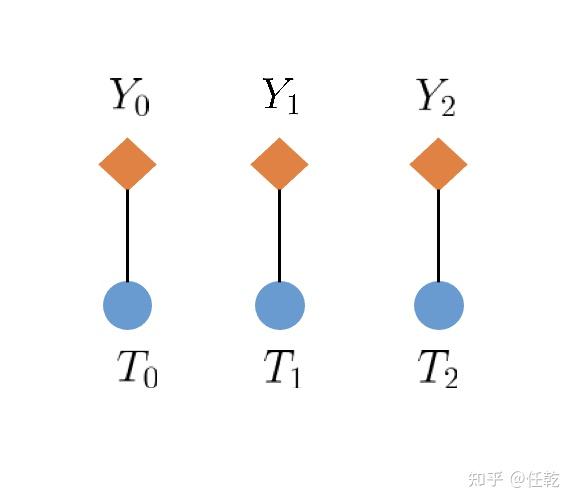
残差关于优化变量的雅可比,可视化如下:
因此,对应的Hessian矩阵的可视化为:
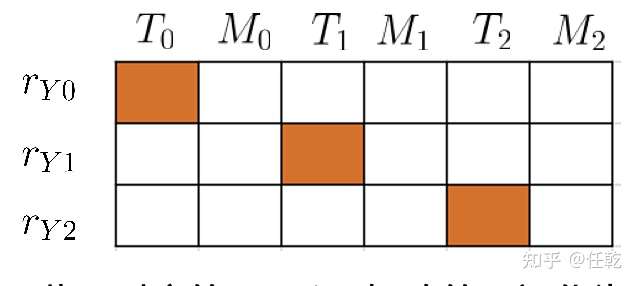
3)激光里程计相对位姿和优化变量的残差
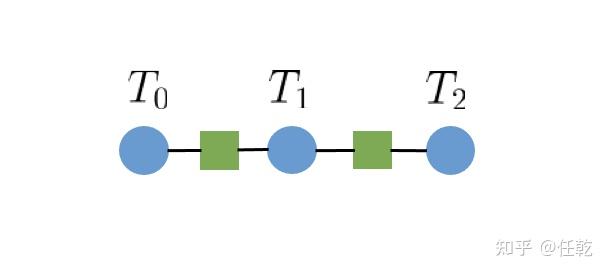
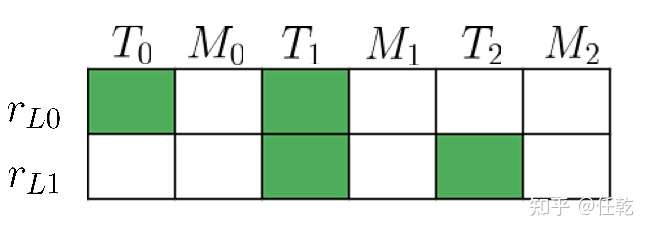
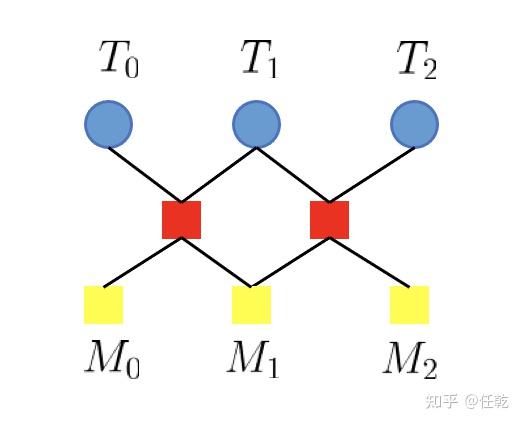
该残差对应的因子为激光里程计因子。一个因子约束两个位姿,其模型如下:
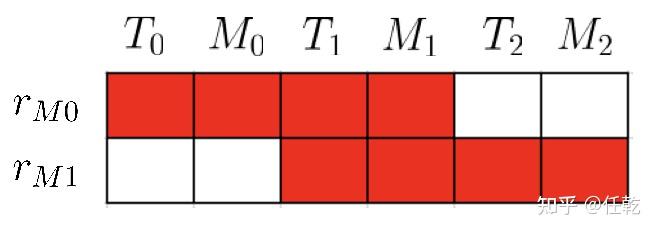
残差关于优化变量的雅可比,可视化如下:
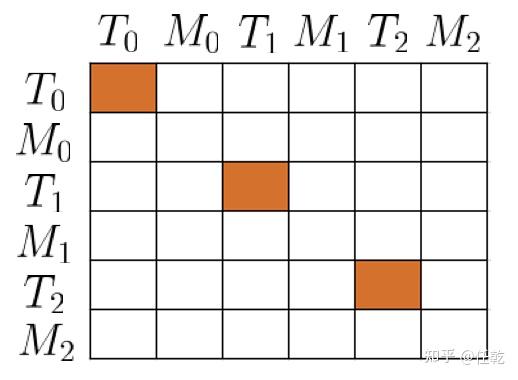
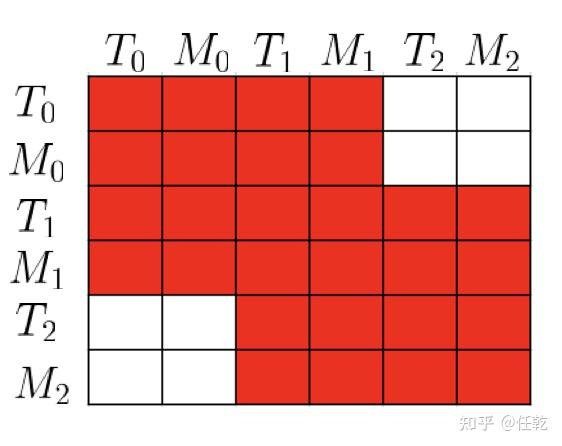
因此,对应的Hessian矩阵可视化为:

4)IMU预积分和优化变量的残差
该残差对应的因子为IMU因子。一个因子约束两个位姿,并约束两个时刻 IMU 的速度与 bias。
残差关于优化变量的雅可比,可视化如下:
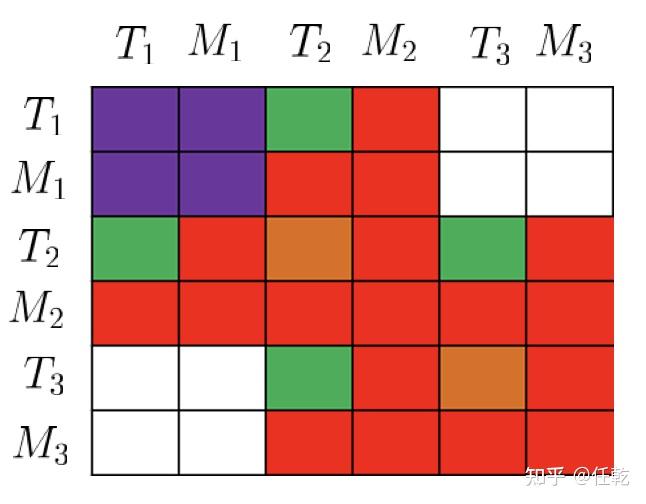
因此,对应的Hessian矩阵可视化为:
5)完整模型
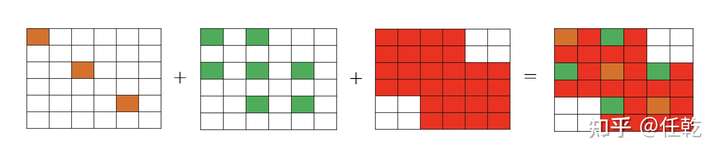
完整Hessian矩阵,即为以上各因子对应矩阵的累加。
上述过程用公式可表示为:
其中
矩阵乘法写成累加形式为:
此累加过程,即对应前面可视化时各矩阵叠加。
2. 边缘化过程
1)移除老的帧
假设窗口长度为3,在加入新的帧之前,需要先边缘化掉老的帧,即下图方框中的变量。
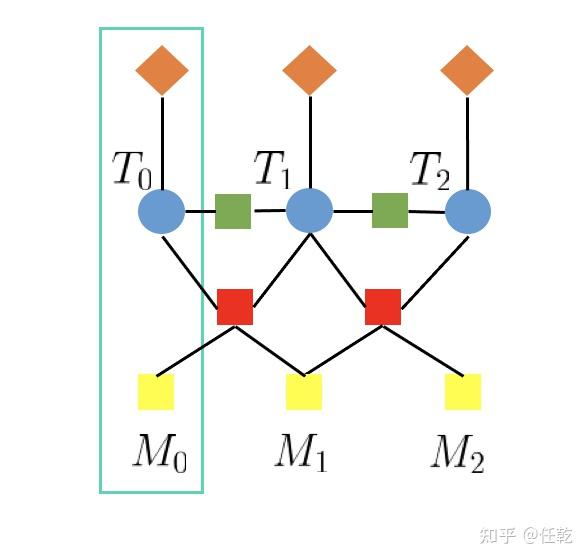
用前述公式,可以表示为
但是在实际代码中,会把它拆成两步实现。
第一步:使用和要边缘化掉的量无关的因子,构建剩余变量对应的Hessian矩阵。
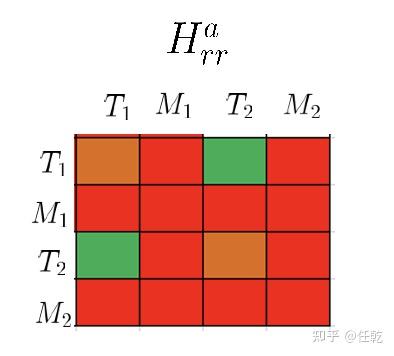
上标 代表是第一步中的变量,包含Hessian矩阵的完整表达式为
第二步:挑出和要边缘化掉的量相关的因子,构建待边缘化的Hessian矩阵,并使用舒尔补做边缘化。
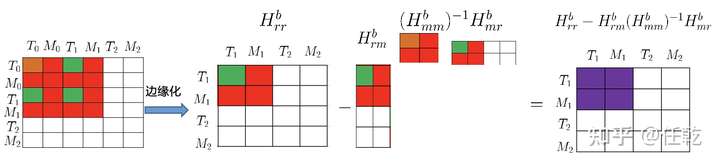
上标 代表是第二步中的变量,包含Hessian矩阵的完整表达式为
这一步形成的约束(上式)就叫先验因子,它包含了边缘化掉的量对剩余变量的约束关系。
最终使用的是两步的叠加,Hessian矩阵叠加的可视化如下

对应的完整公式为
其中
边缘化之后,模型如下:
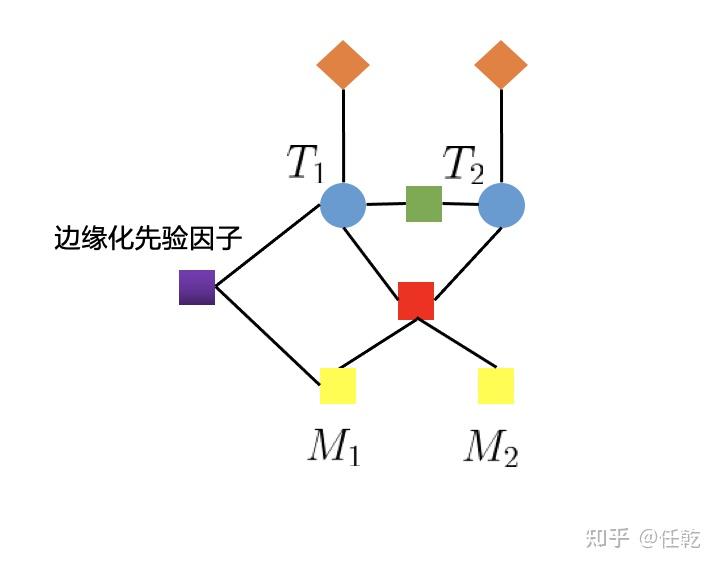
注意:边缘化先验因子只有在第一次边缘化之前是不存在的,完成第一次边缘化之后就一直存在,并且随着后续新的边缘化进行,其内容不断更新。
2)添加新的帧
添加新的帧之后,模型如下:

此处直接给出新的Hessian矩阵可视化结果:
此后,随着定位过程的进行,便不断循环“边缘化老帧->添加新帧”的过程,从而维持窗口长度不变。
五、总结
基于边缘化的滑动窗口在代码里实现起来却是不是一件容易的事,就连讲都很困难,上面通过这种可视化的方式把过程讲了,只能算是描述了流程和原理,但是真正的想要写出来,这些还是不够的,我们无法在这里用文字形式把相关的代码部分再一一讲明,只能靠大家自己去对照着看了(可参考的代码有:lio-mapping、VINS等)。




评论(0)
您还未登录,请登录后发表或查看评论