

整体架构:
如果把自动驾驶想象成一个四层的活动堆栈,按照以下自顶向下的顺序:路线规划、行为规划、运动规划和物理控制。
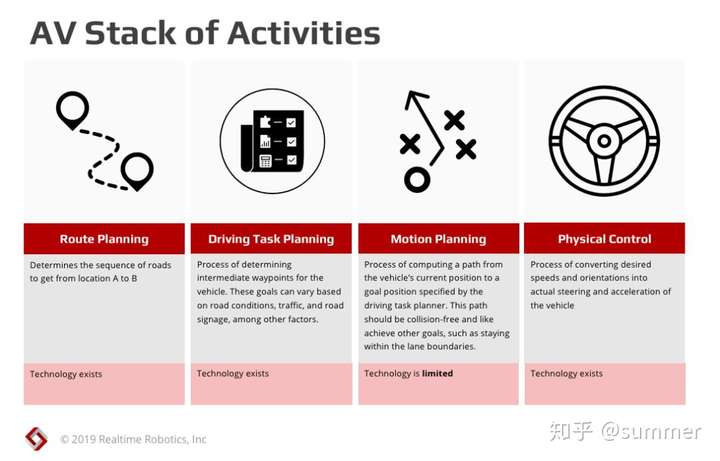
- 路线规划决定了从A点到B点的道路顺序。
- 行为规划是在计划好的路线上确定具体的路线点的过程。这些目标可以根据道路条件、交通和道路标识等因素而变化。
- 运动规划计算从车辆当前位置到由驾驶任务规划器指定的路径点的路径。这条路应该是无碰撞的,并可能实现其他目标,如保持在车道边界内。
- 物理控制是将期望的速度和方向转换为车辆的实际转向和加速度的过程。
所有四个层次都依赖于准确的感知,而这正是大多数解决方案不断涌现的地方。然而,汽车的控制最终归结为这四个控制层次,其中运动规划是目前的技术瓶颈,也是自动驾驶系统的主要障碍。
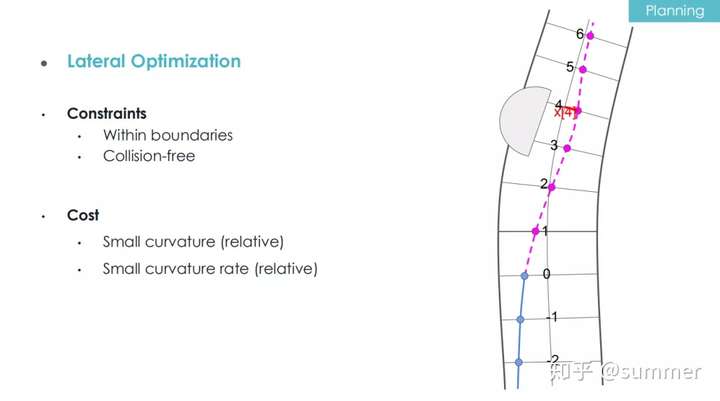
运动规划架构:
转载:写的比较系统,分别针对横纵向在规划层和控制层的算法和架构进行介绍。




评论(0)
您还未登录,请登录后发表或查看评论