

Tracking类的主要功能是初始化、更新当前帧位姿、跟踪关键帧和局部地图、重定位等。由于Tracking类的代码比较长,而且它里面用到的算法内容都在解析其他几个类的时候解释过了,所以本篇文章就不详细解释所有的代码了,而是重点梳理它的流程。
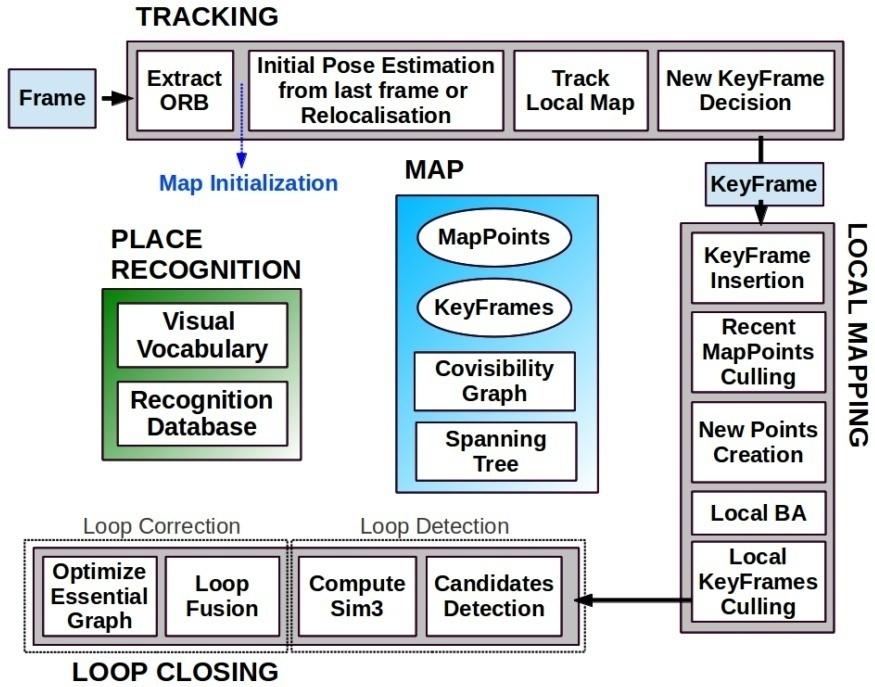
先上一张图,列出这个类的基本流程和主要函数。
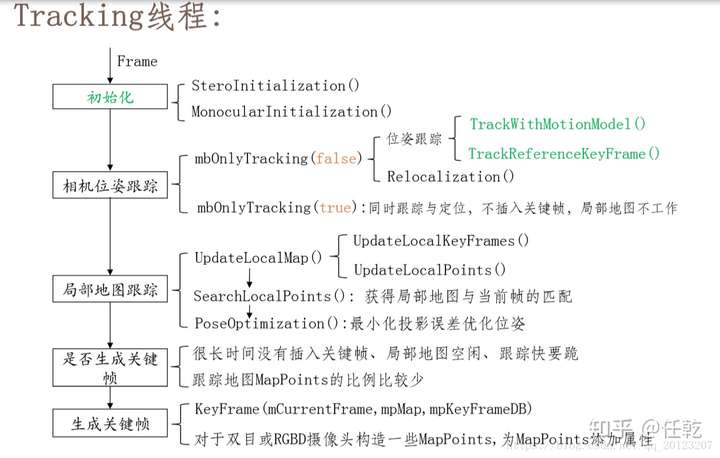
这张图已经很好的概括了这个类的主要内容了,为了更详细的了解这个类的工作流程,我们祭出下面这张图

有了这两张图,我觉得以各位看官的聪明才智,理解这个类的内容就没有什么障碍了吧。
下面列出一些重点的函数的流程
1. TrackWithMotionModel
作用:按照运动模式来进行Track,按照上一帧的速度与位姿作为初始,进行投影优化
1)先通过上一帧的位姿和速度预测当前帧相机的位姿
2)通过PnP方法估计相机位姿,在将上一帧的地图点投影到当前固定大小范围的帧平面上,如果匹配点少,那么扩大两倍的采点范围。
3)然后进行一次BA算法,通过最小二乘法优化相机的位姿。
4)优化位姿之后,对当前帧的关键点和地图点,抛弃无用的杂点,剩下的点供下一次操作使用。
2. TrackReferenceKeyFrame
作用:按照关键帧来进行Track,从关键帧中查找Bow相近的帧,进行匹配优化位姿
1)按照关键帧进行Track的方法和运动模式恢复相机运动位姿的方法接近。首先求解当前帧的BOW向量。
2)再搜索当前帧和关键帧之间的关键点匹配关系,如果这个匹配关系小于15对的话,就Track失败了。
3)接着讲当前帧的位置假定到上一帧的位置那里
4)并通过最小二乘法优化相机的位姿。
5)最后依然是抛弃无用的杂点,当match数大于等于10的时候,返回true成功。
3. Relocalization
作用:重定位,从之前的关键帧中找出与当前帧之间拥有充足匹配点的候选帧,利用Ransac迭代,通过PnP求解位姿。
1)先计算当前帧的BOW值,并从关键帧数据库中查找候选的匹配关键帧
2)构建PnP求解器,标记杂点,准备好每个关键帧和当前帧的匹配点集
3)用PnP算法求解位姿,进行若干次P4P Ransac迭代,并使用非线性最小二乘优化,直到发现一个有充足inliers支持的相机位置。
4)返回成功或失败
4. MonocularInitialization
作用:单目相机的初始化过程,通过将最初的两帧之间进行对极约束和全局BA优化,得到较为准确的初始值
1)当第一次进入该方法的时候,没有先前的帧数据,将当前帧保存为初始帧和最后一帧,并初始化一个初始化器。
2)第二次进入该方法的时候,已经有初始化器了。
3)利用ORB匹配器,对当前帧和初始帧进行匹配,对应关系小于100个时失败。
4)利用八点法的对极约束,启动两个线程分别计算单应矩阵和基础矩阵,并通过score判断用单应矩阵回复运动轨迹还是使用基础矩阵回复运动轨迹。
5)将初始帧和当前帧创建为关键帧,并创建地图点MapPoint
6)通过全局BundleAdjustment优化相机位姿和关键点坐标
7)设置单位深度并缩放初试基线和地图点。
8)其他变量的初始化。
5. TrackLocalMap
作用:通过投影,从已经生成的地图点中找到更多的对应关系,精确结果
1) 更新Covisibility Graph, 更新局部关键帧
2) 根据局部关键帧,更新局部地图点,接下来运行过滤函数 isInFrustum
3) 将地图点投影到当前帧上,超出图像范围的舍弃
4) 当前视线方向v和地图点云平均视线方向n, 舍弃n*v<cos(60)的点云
5) 舍弃地图点到相机中心距离不在一定阈值内的点
6) 计算图像的尺度因子 isInFrustum 函数结束
7) 进行非线性最小二乘优化
8) 更新地图点的统计量
6. NeedNewKeyFrame
作用:判断是否需要生成新的关键帧,确定关键帧的标准
1) 在上一次进行重定位之后,过了20帧数据,或关键帧数小于20个,不满足不能生成
2) 在上一个关键帧插入之后,过了20帧,或 局部建图是空闲状态,不满足不能生成。
3) 当前帧跟踪到大于若干个点,不满足不能生成
4) 当前帧的跟踪点数小于90%的参考关键帧跟踪点数,并且当前帧跟踪点数大于15,不满足不能生成
参考资料:



评论(0)
您还未登录,请登录后发表或查看评论