
一、下载安装插件
插件名称:sw2urdfSetup
下载地址:https://github.com/ros/solidworks_urdf_exporter/releases/tag/1.6.0
下载后直接安装即可。安装成功后,可在SolidWorks的菜单栏中看到:工具—Tools—Export as URDF
二、导出模型
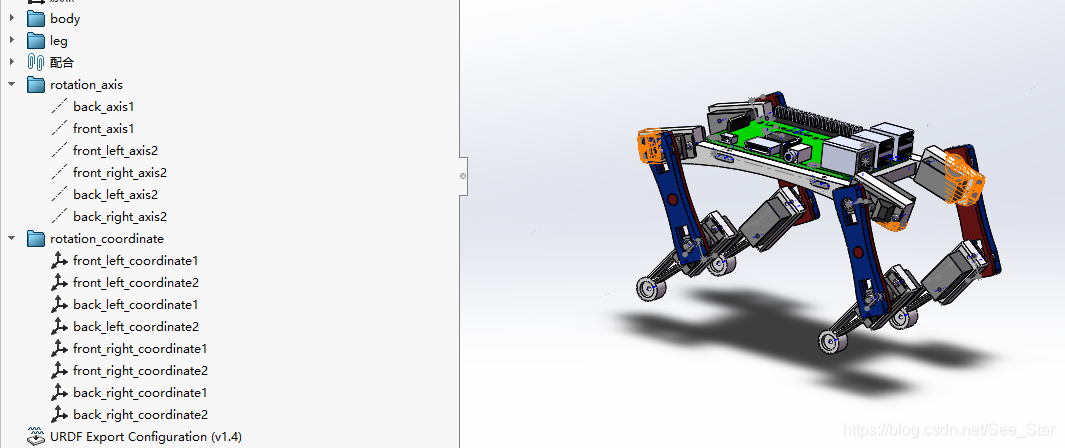
步骤1:打开已经构建好的装配图文件,并保证模型为初始位置。
步骤2:为关节点处添加坐标轴,该模型一共有8个关节,分别添加6个基准轴,和8个坐标系。
6个基准轴分别对应:上肢两个(前面和后面的关节都在同一轴上旋转),下肢四个。
8个坐标轴分别对应:8个旋转关节点,要设置Z轴朝向与基准轴共线,并且坐标系的xyz轴方向一致。
步骤3: 点击:工具—Tools—Export as URDF,进入导出界面。
步骤4: 添加主体部分(base_link)
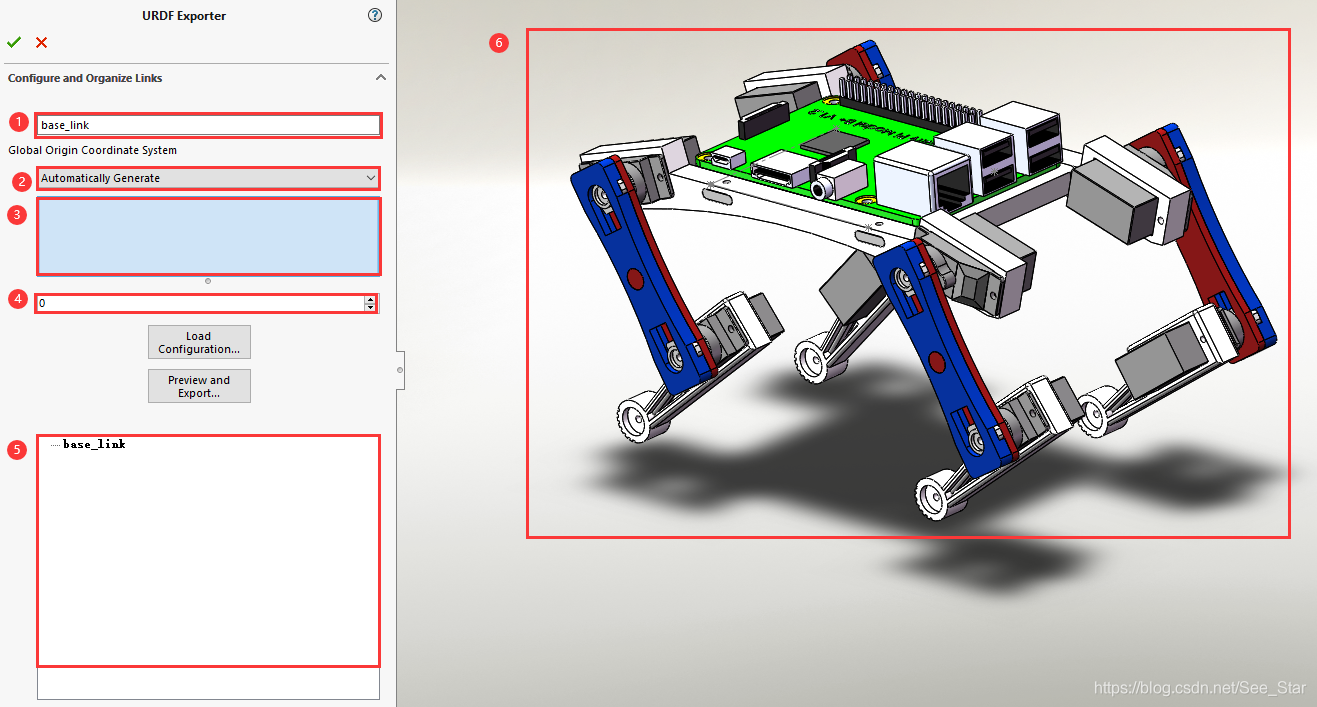
序号1是主体部件的名称,该部件负责连接整个模型的所有部件,该部件是固定的。例如,汽车的车架、机械臂的底座。
序号2是模型的坐标,可以选择自动生成(Automatically Generate)。
序号3是主体部分包含的零件,依次点击所需要的的部件即可。
序号4表示主体部分连接零件的个数,暂时还未添加完成,此处显示为0。
序号5是整个模型的结构,暂时还未添加完成。
序号6为装配图中已经设计好的模型。
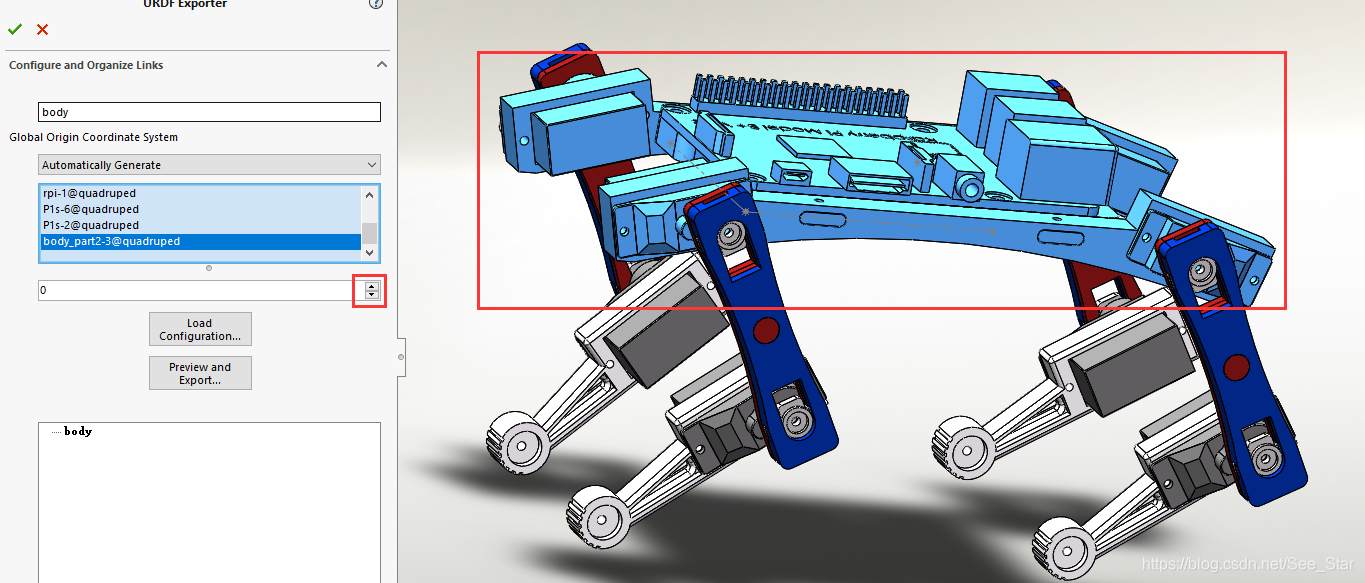
按照要求选择好主体部分,点击序号4(连接部件个数)内的上箭头添加零件部分。
步骤4:添加零件部件
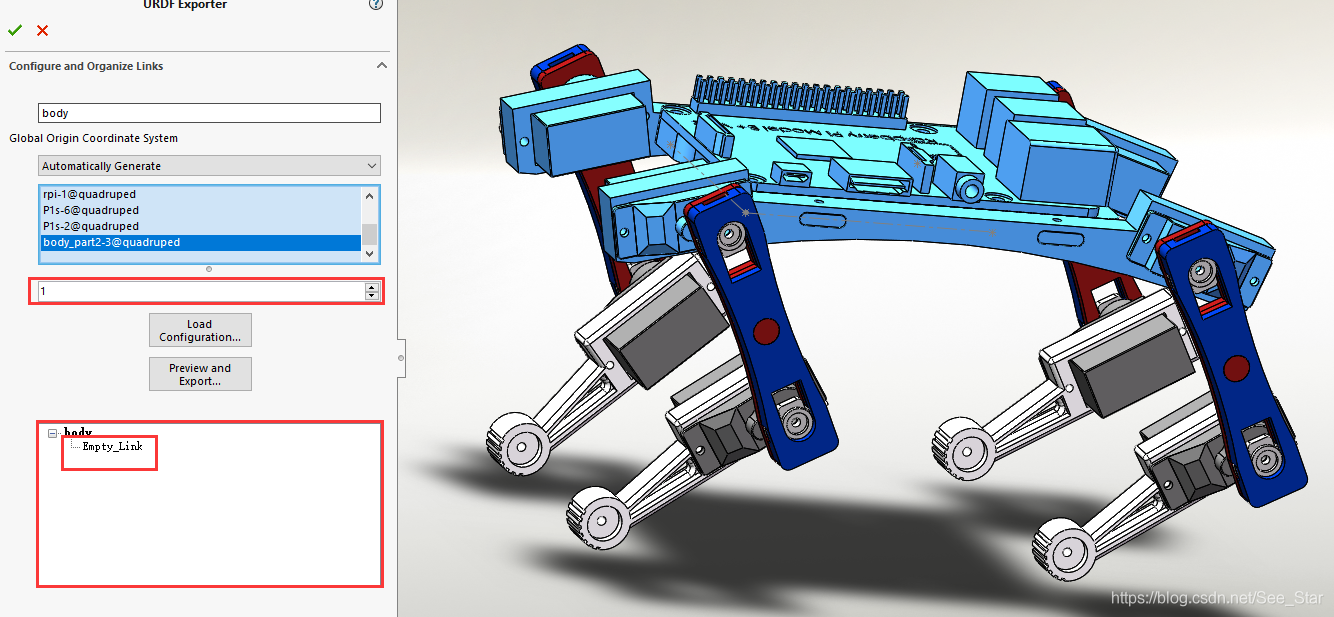
此时连接部件个数从0变为1,模型树内新增一个树枝Empty_Link。点击Empty_Link。
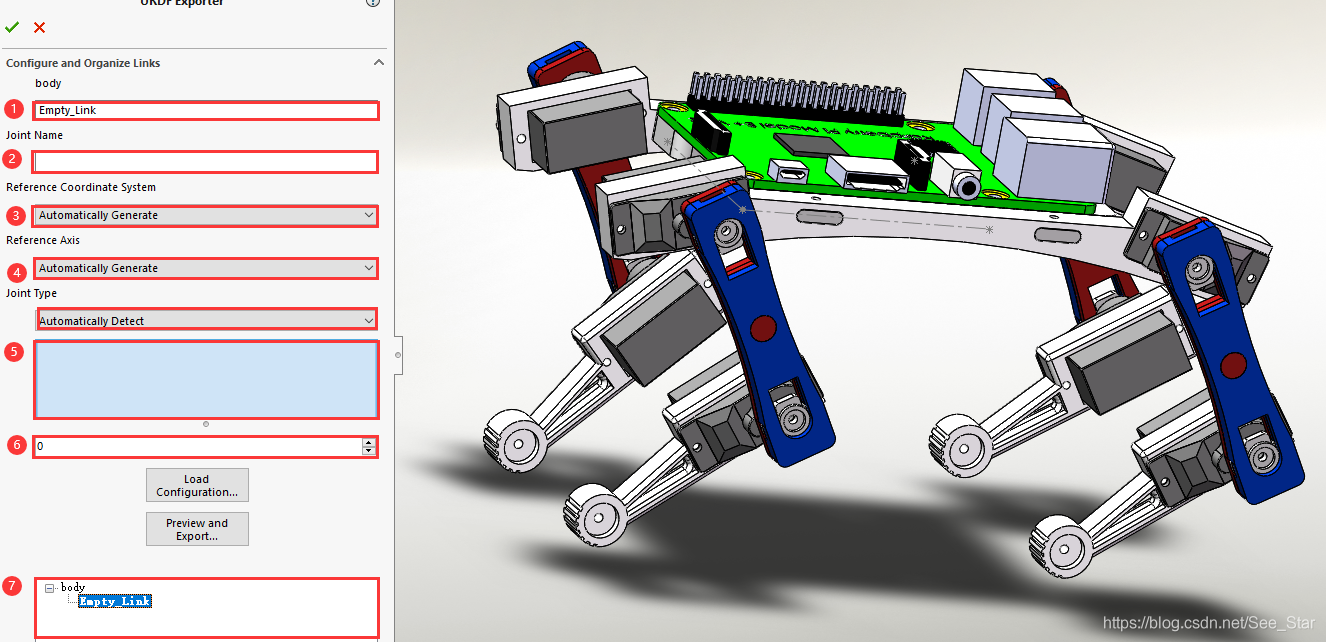
序号1是该部件的名称。
序号2是该部件的与上一部件连接关节(joint)的名称。
序号3是参考坐标系,选择我们在一开始创建的坐标系。
序号4是基准轴,选择我们在一开始创建的基准轴。
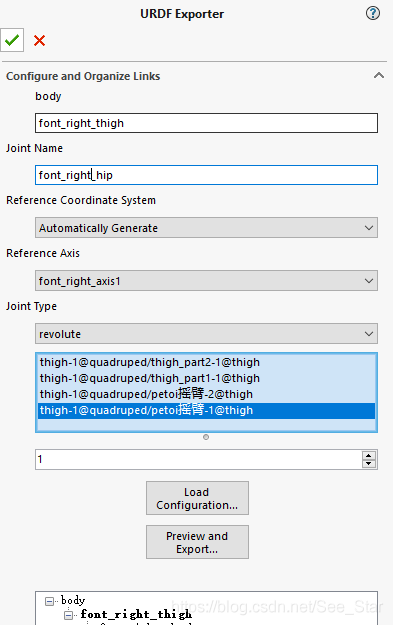
序号5是关节点的连接方式,可以选择自动生成(Automatically Generate),也可指定方式:revolute代表旋转,prismatic代表评议,fix表示固定。这里我选择的是旋转revolute。
序号6是此部分包含的零件。
序号7是此部件的下一级部件个数,该部件为大腿(thigh),其下一部件为小腿(shank)有且只有一个,所以该数值应设为1。
序号8是整个模型的结构,暂时还未添加完。
将内容设置完后,点击上箭头添加下一级部件。
步骤5:导出并预览(Preview and Export)
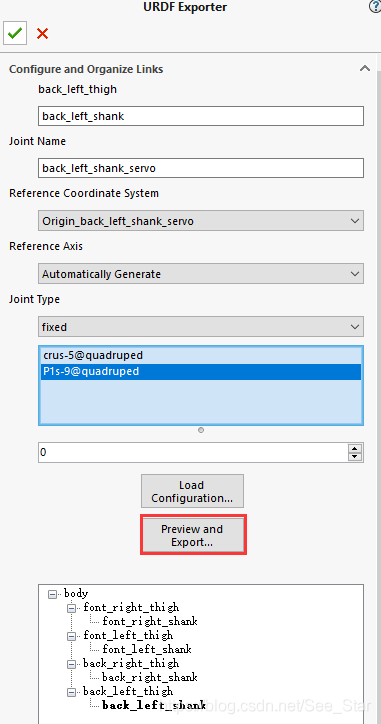
点击Preview and Export并等待一会,即可弹出URDF Exporter设置界面。
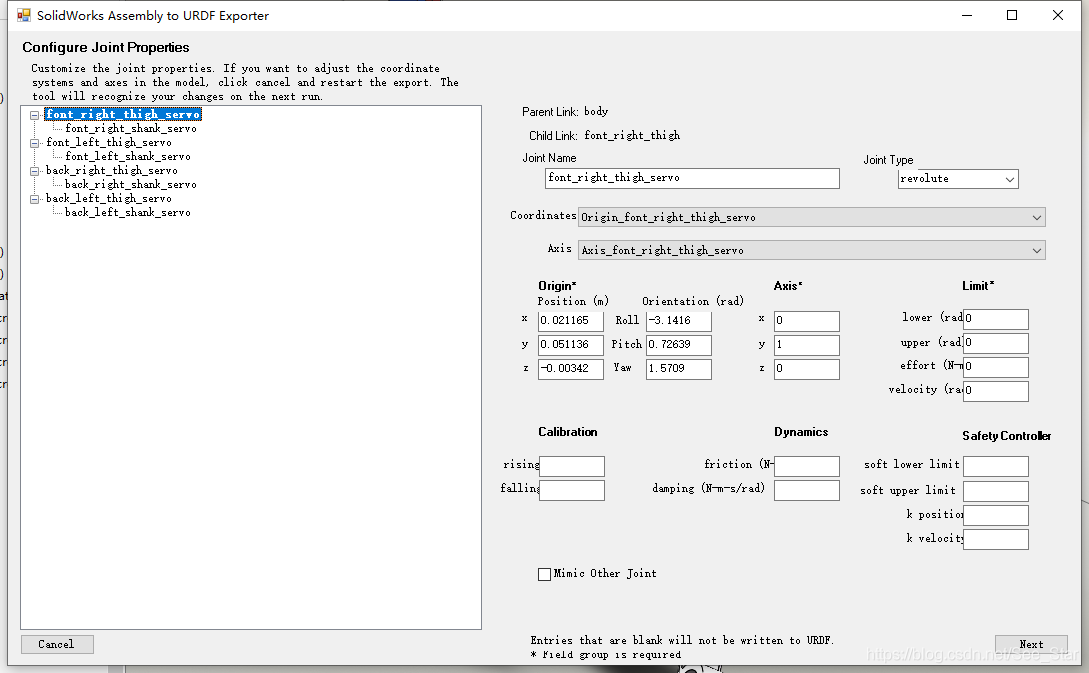
步骤6:对每一个连接点link进行更细致的设置,设置完成后电机Next
步骤7:继续对每一个部件进行设置,主要的设置内容有重量Mass和颜色color。
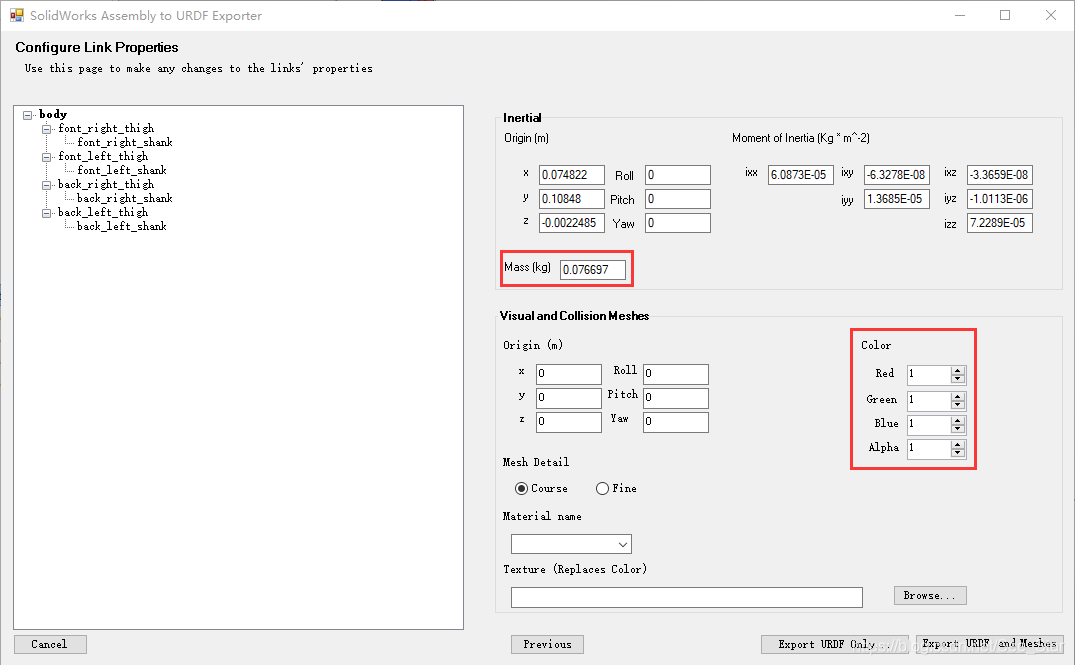
其中,颜色使用RGB模式,但是其取值范围为0-1。
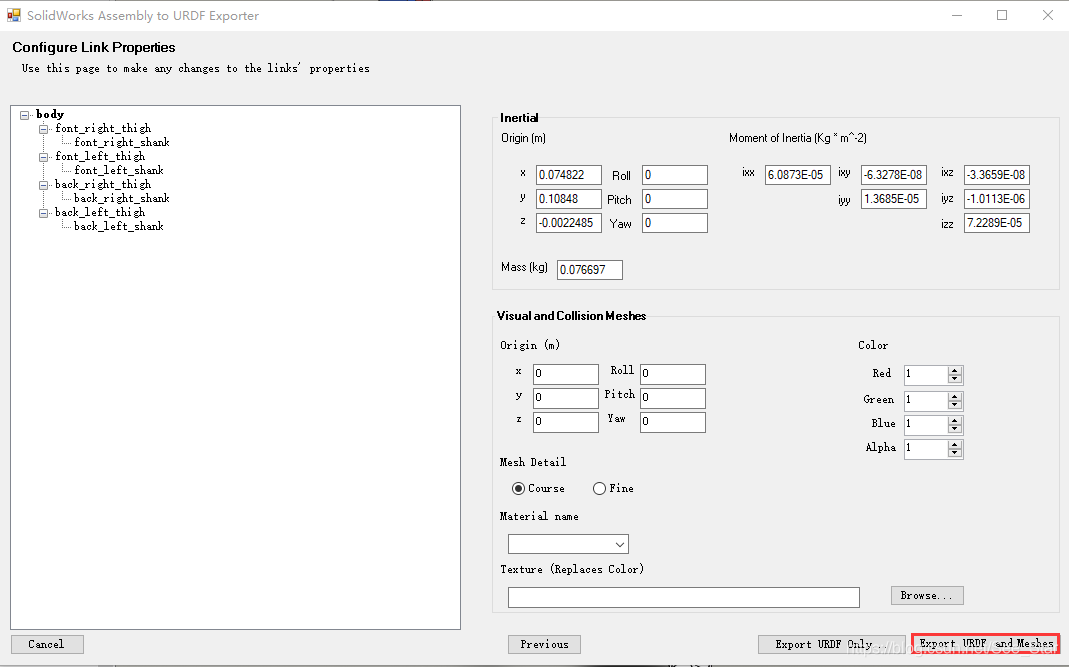
步骤8:点击Export URDF and Meshes即可导出。
导出完成后,可在目录下查看到这些文件。
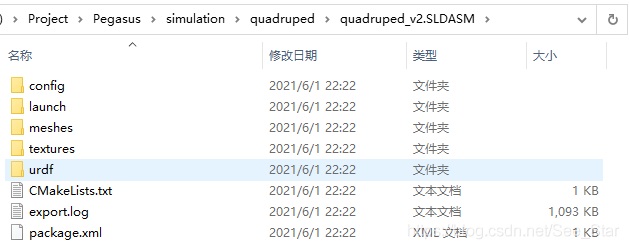
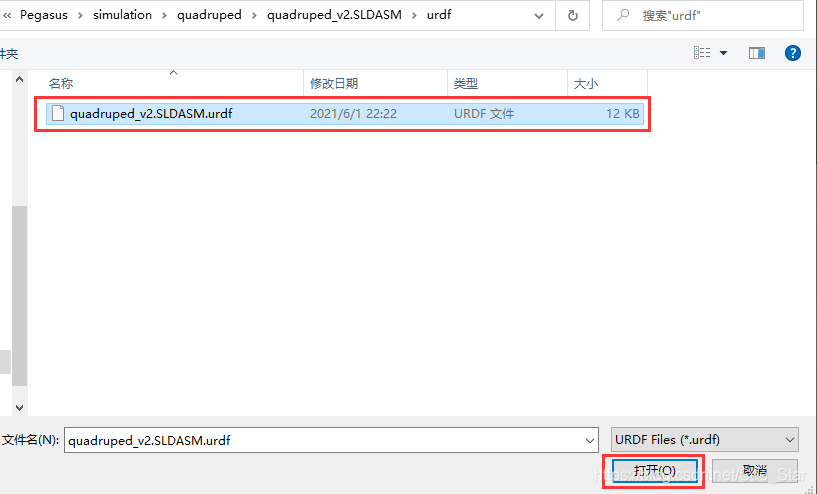
urdf/quadruped_v2.SLDASM.urdf为需要导入CoppeliaSim中的文件。
三、导入模型
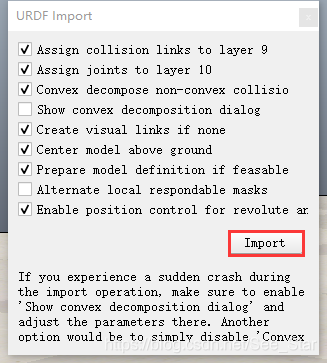
步骤1:打开CoppeliaSim软件,点击菜单栏:Plugins—URDF Import——Import
步骤2:选择刚刚生成的文件
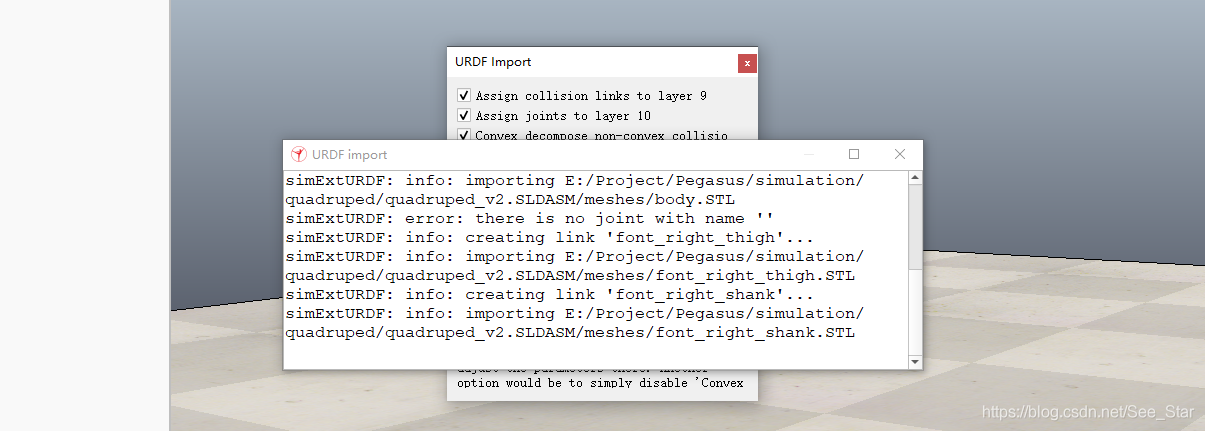
等待导入:
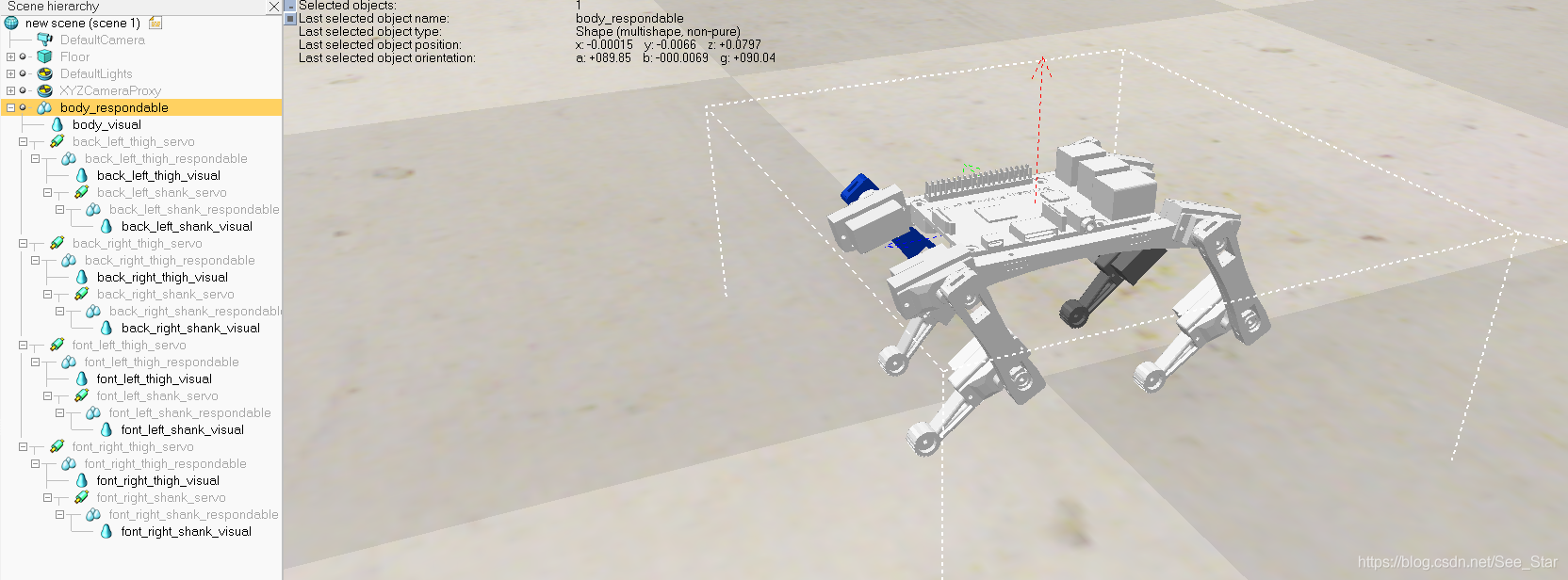
导入成功:




评论(0)
您还未登录,请登录后发表或查看评论