

电容触摸按键原理RC充放电电路原理:
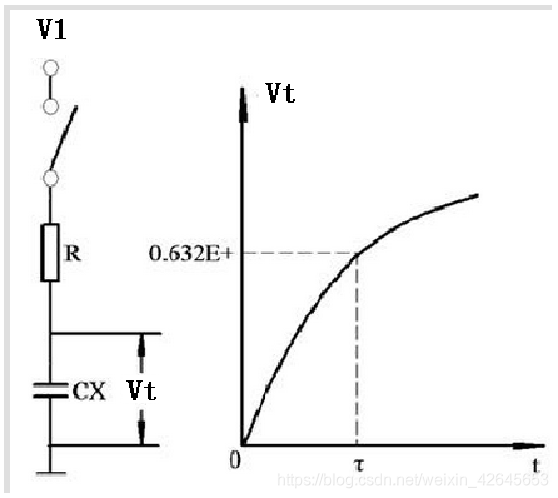
RC充放电原理,其实就是电(R)和电容(C)组成的串联电路。
按键开关未按下时,电路两端电压都是0V,无法形成电势差,也就无法形成电流。但当按键开关按下,电阻端上端有电压:V 1而电容下端有电压Gnd(0V),自此形成电流,形成电流的同时,电容开始充电的过程,由于充电初期电势差比较大,而随着电容的充电,电容的电压会越来越大(电势差越来越小),于是就形成右边的时间与速度的坐标图(一开始电势差大,斜率陡。随着电势差的降低,斜率逐渐平缓)。
RC充放电公式:
V0 为电容上的初始电压值;
V1 为电容最终可充到或放到的电压值;
Vt 为t时刻电容上的电压值。
如果V0为0,也就是从0V开始充电。那么公式简化为:

根据这样的公式,可得到结论:同样的条件下,电容值C跟时间值t成正比关系,电容越大,充电到达某个临界值的时间越长。
电容触摸按键的原理:
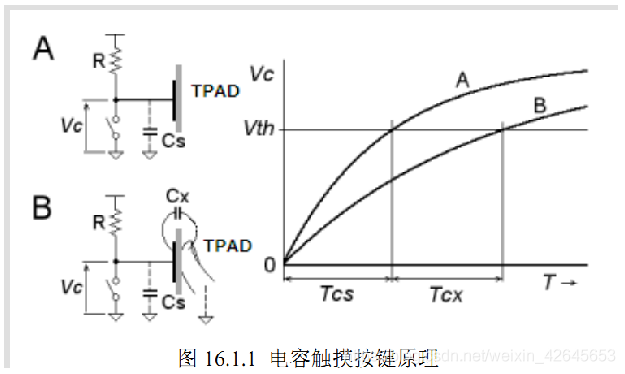
于是乎便引出了电容触摸按键的原理,如上图左边图示在RC充放电电路的基础上,在电容端在并联一个电容(该电容由触摸按键组成,即手指与金属片形成电容),按照电容的并联关系:两个电容并联电容值等于电容值相加,和上面根据充放电公式得到的结论:电容值越大,充电到达某个临界值的时间越长。这样可得到上图右边图示:B线的临界值大于A线,B线的电容大于A线电容的电容值。
那这个与电容触摸按键的原理有什么关系?可通过判断临界值的时间长短来判断手指有没有放在电容触摸传感器上。
检测电容触摸按键过程
①TPAD引脚设置为推挽输出,输出0,实现电容放电到0。
②TPAD引脚设置为浮空输入(IO复位后的状态),电容开始充电。
③同时开启TPAD引脚的输入捕获开始捕获。
④等待充电完成(充电到底Vx,检测到上升沿)。
⑤计算充电时间。
没有按下的时候,充电时间为T1(default)。按下TPAD,电容变大,所以充电时间为T2。我们可以通过检测充放电时间,来判断是否按下。如果T2-T1大于某个值,就可以判断有按键按下。
程序思路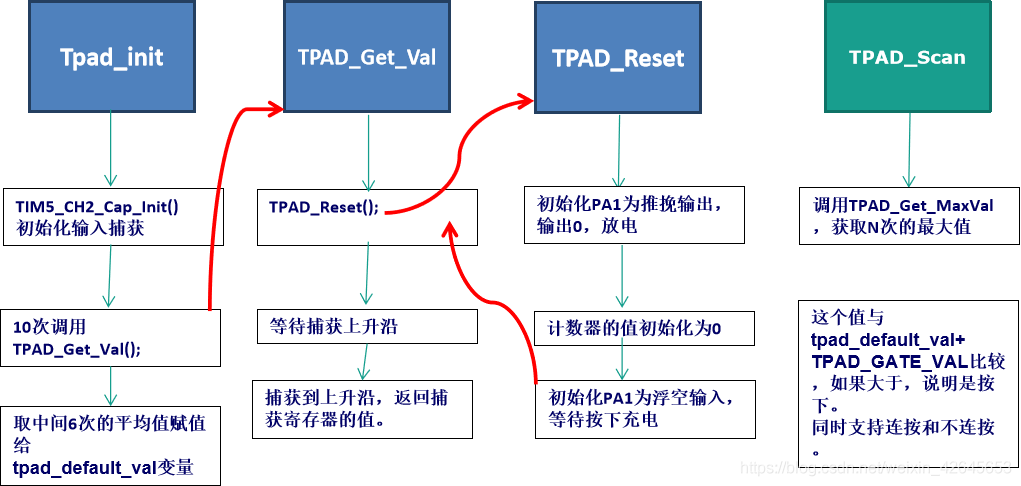
主要函数
说明:对于不同的平台,区别主要是定时器底层相关以及IO口初始化。
①void TPAD_Reset(void)函数:复位TPAD
设置IO口为推挽输出输出0,电容放电。等待放电完成之后,设置为浮空输入,从而开始充电。同时把计数器的CNT设置为0。
② TPAD_Get_Val()函数:获取一次捕获值(得到充电时间)
复位TPAD,等待捕获上升沿,捕获之后,得到定时器的值,计算充电时间。
③ TPAD_Get_MaxVal()函数:
多次调用TPAD_Get_Val函数获取充电时间。获取最大的值。
④ TPAD_Init()函数:初始化TPAD
在系统启动后,初始化输入捕获。先10次调用TPAD_Get_Val()函数获取10次充电时间,然后获取中间N(N=8或者6)次的平均值,作为在没有电容触摸按键按下的时候的充电时间缺省值tpad_default_val。
⑤ TPAD_Scan()函数:扫描TPAD
调用TPAD_Get_MaxVal函数获取多次充电中最大的充电时间,跟tpad_default_val比较,如果大于某个阈值tpad_default_val+TPAD_GATE_VAL,则认为有触摸动作。
⑥ void TIM5_CH2_Cap_Init(u16 arr,u16 psc)//输入捕获通道初始化
可以使用任何一个定时器。M3使用定时器5,M4使用的定时器2。
硬件连接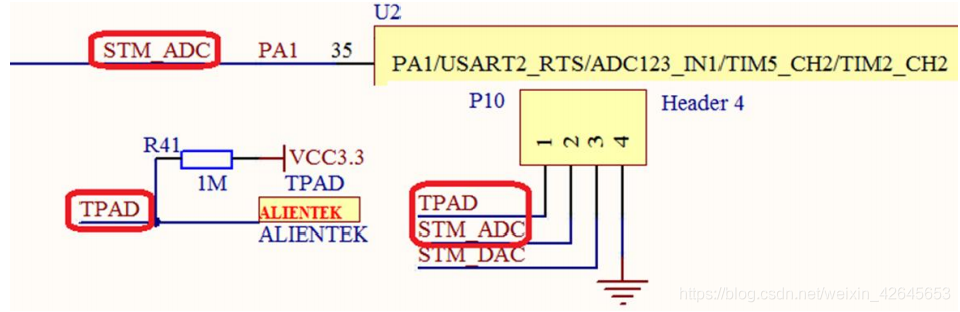

参考程序tpad.c
#include "tpad.h"
#include "delay.h"
#include "usart.h"
#define TPAD_ARR_MAX_VAL 0XFFFF //最大的ARR值
vu16 tpad_default_val=0;//空载的时候(没有手按下),计数器需要的时间
//初始化触摸按键
//获得空载的时候触摸按键的取值.
//返回值:0,初始化成功;1,初始化失败
u8 TPAD_Init(u8 psc)
{
u16 buf[10];
u16 temp;
u8 j,i;
TIM5_CH2_Cap_Init(TPAD_ARR_MAX_VAL,psc-1);//以1Mhz的频率计数
for(i=0;i<10;i++)//连续读取10次
{
buf[i]=TPAD_Get_Val();
delay_ms(10);
}
for(i=0;i<9;i++)//排序
{
for(j=i+1;j<10;j++)
{
if(buf[i]>buf[j])//升序排列
{
temp=buf[i];
buf[i]=buf[j];
buf[j]=temp;
}
}
}
temp=0;
for(i=2;i<8;i++)temp+=buf[i];//取中间的6个数据进行平均
tpad_default_val=temp/6;
printf("tpad_default_val:%d\r\n",tpad_default_val);
if(tpad_default_val>TPAD_ARR_MAX_VAL/2)return 1;//初始化遇到超过TPAD_ARR_MAX_VAL/2的数值,不正常!
return 0;
}
//复位一次
void TPAD_Reset(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PA端口时钟
//设置GPIOA.1为推挽使出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //PA1 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_1); //PA.1输出0,放电
delay_ms(5);
TIM_SetCounter(TIM5,0); //归0
TIM_ClearITPendingBit(TIM5, TIM_IT_CC2|TIM_IT_Update); //清除中断标志
//设置GPIOA.1为浮空输入
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
//得到定时器捕获值
//如果超时,则直接返回定时器的计数值.
u16 TPAD_Get_Val(void)
{
TPAD_Reset();
while(TIM_GetFlagStatus(TIM5, TIM_IT_CC2) == RESET)//等待捕获上升沿
{
if(TIM_GetCounter(TIM5)>TPAD_ARR_MAX_VAL-500)return TIM_GetCounter(TIM5);//超时了,直接返回CNT的值
};
return TIM_GetCapture2(TIM5);
}
//读取n次,取最大值
//n:连续获取的次数
//返回值:n次读数里面读到的最大读数值
u16 TPAD_Get_MaxVal(u8 n)
{
u16 temp=0;
u16 res=0;
while(n--)
{
temp=TPAD_Get_Val();//得到一次值
if(temp>res)res=temp;
};
return res;
}
//扫描触摸按键
//mode:0,不支持连续触发(按下一次必须松开才能按下一次);1,支持连续触发(可以一直按下)
//返回值:0,没有按下;1,有按下;
#define TPAD_GATE_VAL 100 //触摸的门限值,也就是必须大于tpad_default_val+TPAD_GATE_VAL,才认为是有效触摸.
u8 TPAD_Scan(u8 mode)
{
static u8 keyen=0; //0,可以开始检测;>0,还不能开始检测
u8 res=0;
u8 sample=3; //默认采样次数为3次
u16 rval;
if(mode)
{
sample=6; //支持连按的时候,设置采样次数为6次
keyen=0; //支持连按
}
rval=TPAD_Get_MaxVal(sample);
if(rval>(tpad_default_val+TPAD_GATE_VAL))//大于tpad_default_val+TPAD_GATE_VAL,有效
{
if(keyen==0)res=1; //keyen==0,有效
//printf("r:%d\r\n",rval);
keyen=3; //至少要再过3次之后才能按键有效
}
if(keyen)keyen--;
return res;
}
//定时器2通道2输入捕获配置
void TIM5_CH2_Cap_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM5_ICInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); //使能TIM5时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PA端口时钟
//设置GPIOA.1为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //PA1 端口配置
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //设置为浮空输入
//初始化TIM5
TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化通道2
TIM5_ICInitStructure.TIM_Channel = TIM_Channel_2; //CC1S=01 选择输入端 IC2映射到TI5上
TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM5_ICInitStructure.TIM_ICFilter = 0x03;//IC2F=0011 配置输入滤波器 8个定时器时钟周期滤波
TIM_ICInit(TIM5, &TIM5_ICInitStructure);//初始化I5 IC2
TIM_Cmd(TIM5,ENABLE ); //使能定时器5
}
tpad.h
#ifndef __TPAD_H
#define __TPAD_H
#include "sys.h"
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK战舰STM32开发板
//TPAD驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//修改日期:2012/9/5
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2009-2019
//All rights reserved
//
extern vu16 tpad_default_val;
void TPAD_Reset(void);
u16 TPAD_Get_Val(void);
u16 TPAD_Get_MaxVal(u8 n);
u8 TPAD_Init(u8 psc);
u8 TPAD_Scan(u8 mode);
void TIM5_CH2_Cap_Init(u16 arr,u16 psc);
#endif
main.c
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "tpad.h"
/************************************************
ALIENTEK精英STM32开发板实验11
电容触摸按键实验
技术支持:www.openedv.com
淘宝店铺:http://eboard.taobao.com
关注微信公众平台微信号:"正点原子",免费获取STM32资料。
广州市星翼电子科技有限公司
作者:正点原子 @ALIENTEK
************************************************/
int main(void)
{
u8 t=0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
TPAD_Init(6); //初始化触摸按键
while(1)
{
if(TPAD_Scan(0)) //成功捕获到了一次上升沿(此函数执行时间至少15ms)
{
LED1=!LED1; //LED1取反
}
t++;
if(t==15)
{
t=0;
LED0=!LED0; //LED0取反,提示程序正在运行
}
delay_ms(10);
}
}


评论(0)
您还未登录,请登录后发表或查看评论