

作为一个普通的理工生,很荣幸用自己整个博士学习时光见证了无人机整个行业和技术的崛起,从TED看到拉菲罗教授展示的四轴飞行器演示,第一次被真正的自动控制所震惊了,原来机器人是那么好玩,在兴趣使然下从电力电子转到了自动化,那时候课题组正好在准备中航工业杯,使用的飞控还是现在已经绝版的悟空飞控,由于那个时候的大疆还没有二次开发接口,而它也是唯一在自组情况下能实现15kg级8轴的唯一选择,所以我们直接使用了一个DSP来模拟遥控器输出并结合视觉勉强实现了自主起飞降落,还有目标投递,但是由于没法读取导航数据因此只能通过盲飞的方式在不同区域移动,当然可想而知最终的效果不是很理想。

那个时候开源飞控正在国内起步,px4好多人都还不知道,当然研究所里做固定翼的很多人都还看不起四轴飞行器,更别说把他叫做无人机。匿名飞控,无穷飞控都是那个时候耳熟能详的开源项目,当然我也跟随开源大潮开始自己写开源飞控,自己起了个比较low的明字叫oldx飞控,但实际我不太倡导国内的开源环境因为大家都是互相抄来抄去,每个新出现的飞控基本都是从头又来一遍,国内也没有很好的合作开发模式,导致后期px4都已经实现gps航线规划,并且成为许多植保无人机采用飞控的时候,国内开源飞控还停留在超声波定高,能解决光流定位或者气压定高的都算少之又少。这种现象到目前都还没有完全解决,oldx飞控可以算是当时较少见的算开源并且具有光流,气压,gps功能的开源项目,也是国内第一个使用ADRC作为核心控制器的飞控,可惜由于博士论文压力没有时间好好维护社区最终胎死腹中,当然现在你还是可以下载该项目。


oldx的失败一直困扰着我,虽然也在学校内被用作了实验用教学平台,但受限于个人能力没法把他做成一个更完善并且被大家更认同的开发平台最终也影响了我择业的方向。
读博期间长期带队比赛,参加了多次中航工业等比赛,也出货去了几次IMAV,虽然取得多么骄人的成绩,但我最自豪的便是在清一色老外使用Px4和大疆飞控的参赛队中,我用自己写的飞控获得旋翼飞行器类最佳奖项,老外看到我用单片机自制的自主任务和航线规划监视器还以为作弊手动遥控,直到飞机超越目视距离,图传中无人机自主搜索到树林里的目标精确投递了医疗包,最终精确视觉引导降落在H标志上,裁判只能点头说了一句Well。
在临近毕业的时候同样是在TED上看到了Raibert老爷子的演讲,那个时期在阿莫电子论坛也混了很长时间,王兴兴大神那时候也才刚完成Xdog正在到处蹭展览
,国内很多人对四足机器人也还没有啥特别大的认识,同样是兴趣使然在完成毕设的时间中想仿照Ghost RoboticsRobotic Minituar但受限于国内没有现成的无刷驱动器只能用舵机制作,这也是我开始制作舵狗的契机。

我的第一个舵狗是Moco 8他的结构和Minituar一样采用并联8自由度结构,由于那个时候没太接触过机器人运动学控制,连leg that balanced的神书都还没翻完,因此大部分算法都来源于我的飞控部分,最早的版本完全采用运动学逆解增量控制腿长来实现姿态稳定,整体步态也是开环倒立摆模型,因此效果一般。
结合制作开源飞控的经历这次采用了开源加授权的模式,授权当时唯一在舵狗中引入虚拟模型vmc和逆运动学的步态算法,整体步态效果非常稳定,并且在增加slip开环前馈后也实现简单的飞行相。
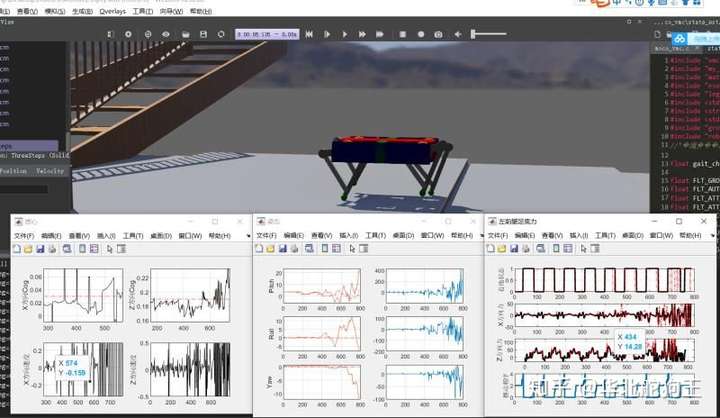
致此,已经走上舵狗Diy的不归路,相比无刷机器人来说,舵狗没法采用力控,因此没法实现很多柔顺效果,但是舵机价钱低驱动简单,能很快滴搭建不同的机器人原型,基于该平台很快就把之前无人机实现的很多图像导航程序移植到四足机器人上,并重新构建了一个更完善的开源项目,也算为自己的求学之路划上了一个句号,更何况当年淘宝上贩卖的还只有蜘蛛形式的多足机器人,这里也安利下我研究生阶段自制的六足机器人,虽然完成度不高但也是转向机器人研究方向的第一此尝试!
借助这个平台我接触到了很多优秀的极客,他们在毕业后有的选择继续创业,也有的选择去高科技企业,而我的舵狗DIY又到了重新选择方向的关键时刻。那一年最重要的新闻就是MIT开源了自己的四足机器人,那算是揭开了这几年四足机器人热潮的大幕,参考无人机发展历程,同样也是大疆一家独大,ETH Px4开源后国内无人机公司如雨后春笋一般层出不穷,而四足机器人产业整个发展历程的速度只会更快。
在这个大背景下,为了蹭下热点,我把moco 8从并联腿修改为了串联腿,造型也缩比了mini cheetah,在原有的基础上重新梳理了VMC控制方法在舵狗里的优化空间,实现了一个令人惊喜的效果,当然最后才发现,自己苦思冥想总结的方法早在MIT Little Dog项目中就早已经应用。
在这期间突然萌发了一个想法,希望能设计一个控制器兼容各种构型的舵狗,就像大疆Naza飞控一样即便宜又能通过简单的配置就可以实现可靠的控制效果,这也是Moco通用机器人控制器的雏形。

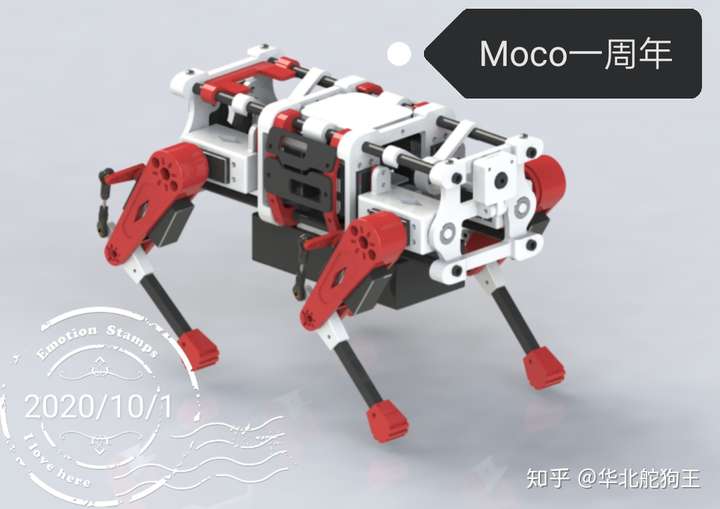
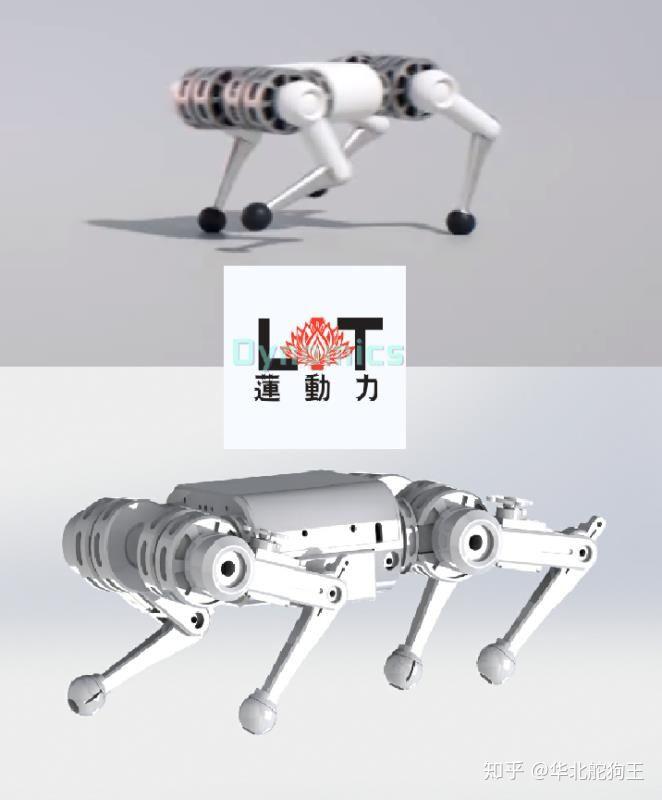
为此一个全新的12自由度舵狗横空出世,再参考了很多优秀机器人结构设计后,设计出了一个造型最仿真的四足机器人缩比模型Moco 12。
在扩展现有VMC舵狗控制框架后,控制器能完全适用于不同构型尺寸的舵狗,借助于舵机较高的标准化程度,通用控制模型能适用于串联,并联,内膝,外膝,3自由度,2自由度,以及不同类型的舵机驱动的舵狗,通过类似QGC的上位机能快速完成参数配置和舵机关节标定。在这期间Moco舵狗宇宙也不断扩展,包括Minituar缩比:

Mini cheetah修正缩比:

Moco12修正缩比模型:

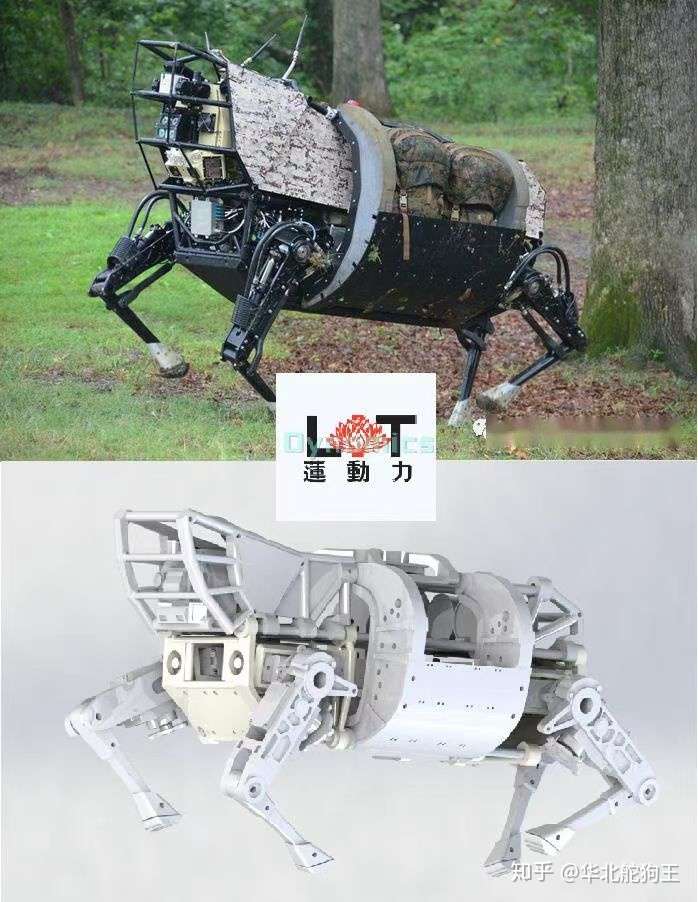
另外还只做了应该算首个波士顿动力系列四足机器人的高精度缩比模型,比如LS3:
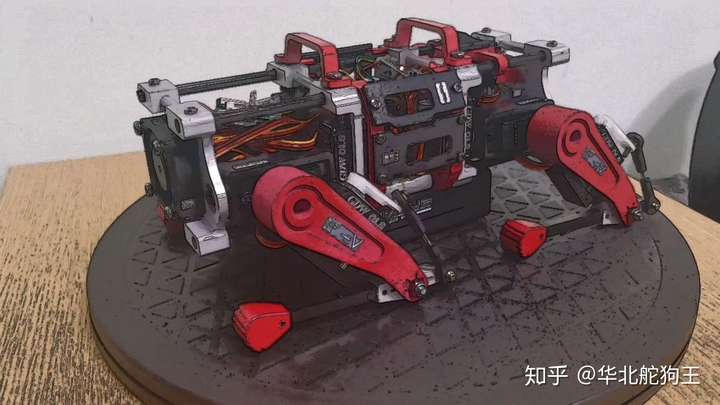
基于这个想法我看到国外有一个很小众的仿真缩比RC军事模型圈子,这和我之前制作四足机器人缩比模型的想法不谋而合,在学习了一些简单模型制作技术后,一个具有赛博朋克涂装的Moco12被制作了出来:
这基本可以算是目前制作手段最精良,同时步态效果也最好的四足机器人缩比模型了,当然这个项目同样也采用了之前开源加授权的方案,很欣喜的是有不少人基于这个方案制作了属于自己的机器人,其中还包括外国友人:
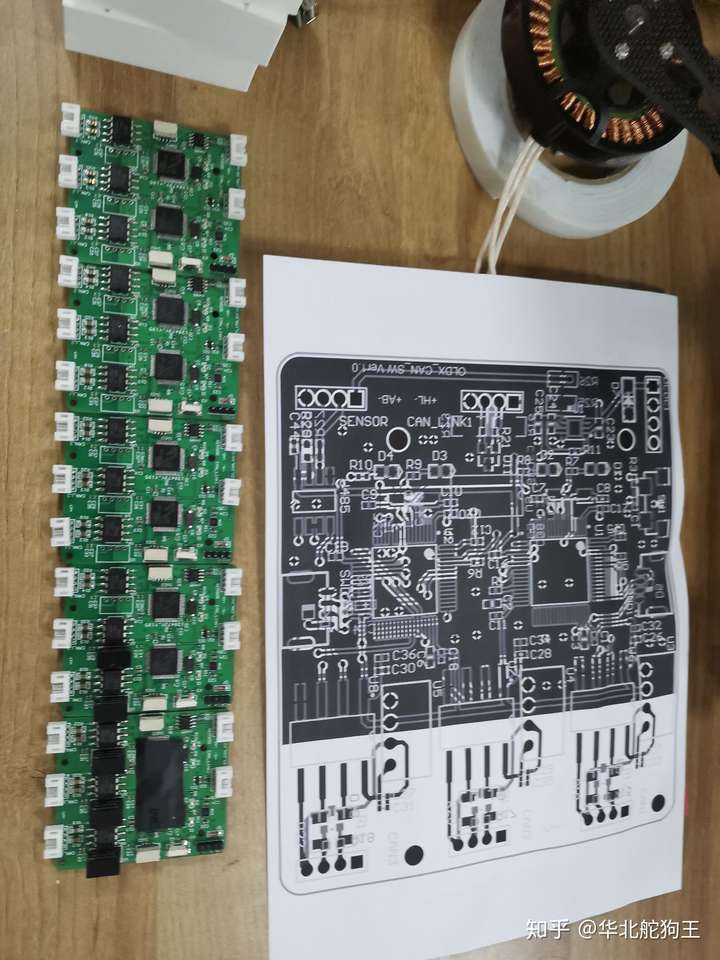
说说该项目的近况吧,虽然由于工作原因相关内容的开发时间越来越被压缩但总的还是相比oldx飞控有得更远,完成了小批量试制:

基于通用控制器也和高校合作参加了中国机器人大赛,取得了还不错的奖项:
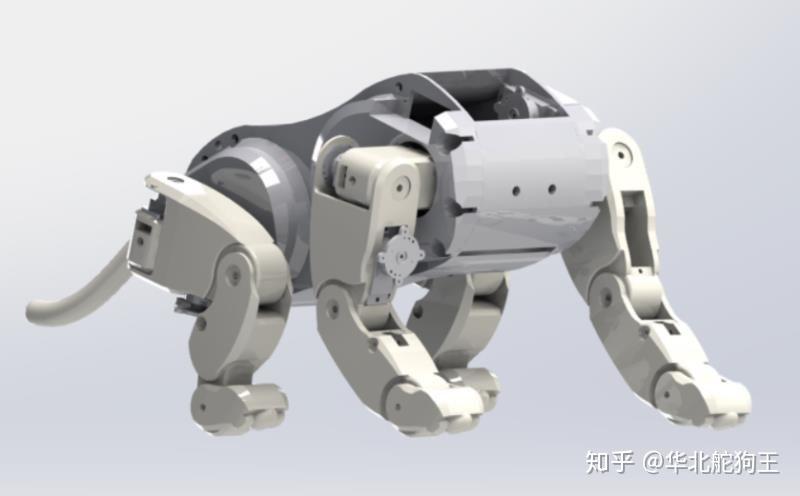
未来,出了继续完善控制器外,希望能把目前所有顶尖的四足机器人都制作完成相应的缩比模型,像spotmini,anymal,另外一个新的真正仿生舵狗系列也在不断推进,希望能构建一个类似Petoi能众筹,但正真对标Sony Aibo的宠物机器人:


以上就是我自制舵狗两年的历程,虽然没有啥大的成功,但让我最有力量的就是自己坚持的东西没有人做的比我更深入,很多原创的Idea也只有Moco系列才能胜任,对于极客开发来说我想最合适的一句话便是"极客的钻研和坚持并不是为了成功,所以哪里会失败!",后面希望除了能有时间尽快完成这些计划外,自己的专栏能有100个自己原创的文章,以后一定演出一本书叫《华北舵狗王带你做舵狗》






逆时间线开始处———————————
")


评论(0)
您还未登录,请登录后发表或查看评论