

Ros之Stereo_camera学习记录
Stereo_camera
相当于一个双目摄像头,可以获取左右视觉的图像,这几天碰巧遇到,并与其发生了一些关系,记录下来,已备后面查阅。
具体内容如下:
<sensor type="multicamera" name="stereo_camera">
<pose frame=''>0 0 -0.2 0 90 0</pose>
<child>/multicamera_link</child>
<parent>base_link</parent>
<update_rate>30.0</update_rate>
<camera name="right">
<pose>0 0.12 0 0 0 0</pose>
<horizontal_fov>1.5708</horizontal_fov>
<image>
<width>752</width>
<height>480</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.000</stddev>
</noise>
</camera>
<camera name="left">
<pose>0 0 0 0 0 0</pose>
<horizontal_fov>1.5708</horizontal_fov>
<image>
<width>752</width>
<height>480</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.000</stddev>
</noise>
其中,由于基础没学好,调整stereo_camera的摄像头朝向位置捣鼓了半天,
pose设置x\y\z\r\p\y
摄像头位置:x、y、z,即代表了当前摄像头的安装位置
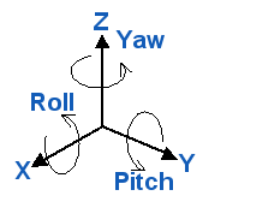
旋转角度:r、p、y,称为欧拉角
分别表示
rool:滚转角,pitch:俯仰角,yaw:偏航角
摄像头朝下,即
Pose 0,0,0,0,90,0
45度
Pose 0,0,0,0,45,0
后面的欧拉角应该是有范围的,具体没有搞明白
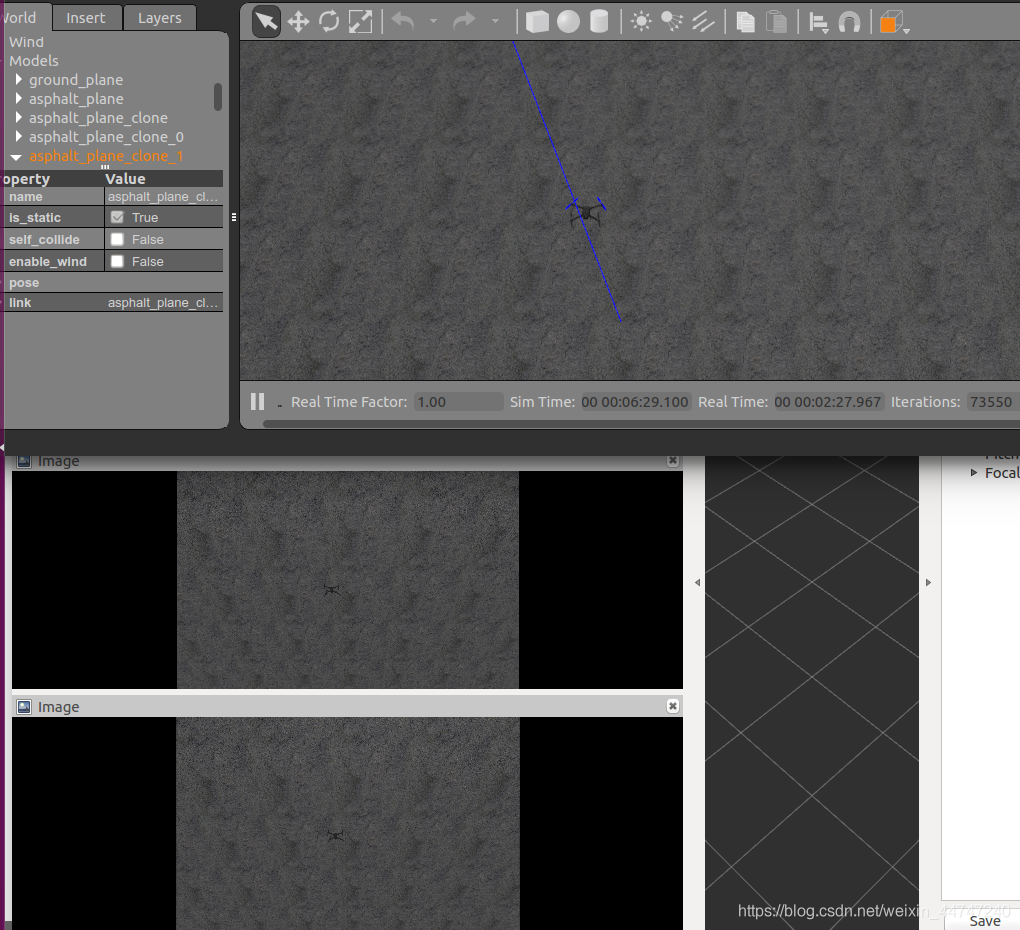
运行gazebo后,通过rviz查看图像




评论(0)
您还未登录,请登录后发表或查看评论