

2D-3D pose tracking
本文主要是记录一下 <Monocular Camera Localization in Prior LiDAR Maps with 2D-3D Line Correspondences> (IROS 2020)这篇文章的开源代码的编译运行方法。
文章主要讲述利用线匹配的方法在,把单目相机获得的2d图像和先验3d激光雷达点云地图进行匹配的方法。
论文链接: https://arxiv.org/abs/2004.00740.
开源代码链接:https://github.com/Zumbalamambo/2D-3D-pose-tracking.
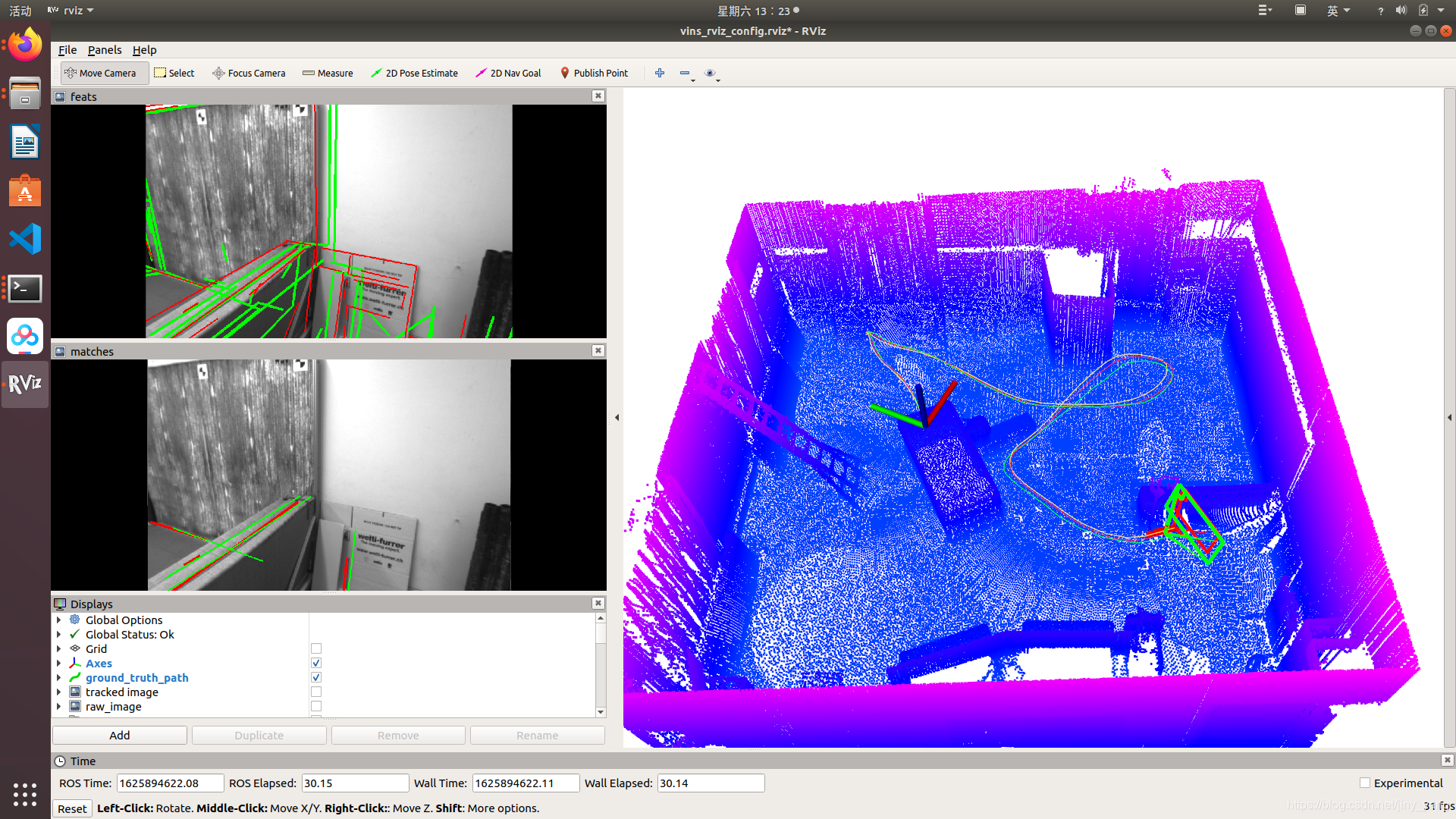
运行结果示意图
 由于我在编译代码的时候网上并没有看到相关的编译运行教程,但是确实遇到了一点坑,于是就趁着最近比较空写一篇博客啦~
由于我在编译代码的时候网上并没有看到相关的编译运行教程,但是确实遇到了一点坑,于是就趁着最近比较空写一篇博客啦~
我的环境配置:
ubuntu18.04 + ROS + CUDA10.2 + CUDNN7.6.85 + (python3.7+pytorch1.7用于配置afm) + (python2.7+pytorch1.4用于ROS运行代码)
个人感觉比较坑的就是要安装两个版本的python+pytorch这里了,在2d-3d-pose-tracking的README里面只提到了要使用python2,但是仅仅用python2是编译不了afm的。(afm是作者借用别人提出的一种基于学习的方法提取2d直线的算法)
afm算法的链接: https://github.com/cherubicXN/afm_cvpr2019
编译步骤:
首次先把afm文件夹、initialization_publisher文件夹、map_fusion文件夹放置到catkin_ws文件夹下面,然后开始编译。
1、编译afm:
根据afm的github的描述,需要以下环境,实测我的python3.7+pytorch1.7也是可以满足的。这里我使用了anaconda的虚拟环境,但是virtualenv之类的python虚拟环境应该也是可以用的。
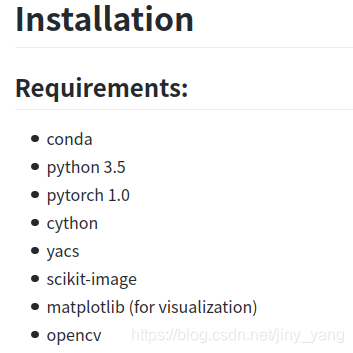
具体的安装方法如下所示。
先使用anaconda新建一个名为afm的python3的虚拟环境.
conda create --name afm python=3.7
conda activate afm
然后进入到afm文件夹,安装python所需要的环境.
安装pytorch torchvision时很可能会出现网络问题导致下载失败,可以考虑更换成为清华源,还是不行的话需要在网页上找到pytorch清华源,下载后再使用conda的本地安装功能。
cd catkin_ws/src/afm/scripts
pip install -r requirements.txt
//cudatoolkit的版本根据自己的cuda版本来
conda install pytorch torchvision cudatoolkit=10.2 -c pytorch
进入lib文件夹,开始编译
cd lib
make
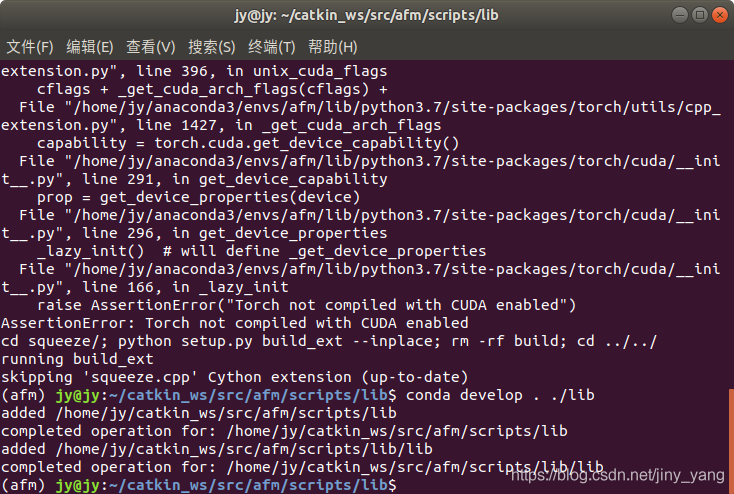
conda develop . ./lib
最终结果如下图所示就是编译完成了.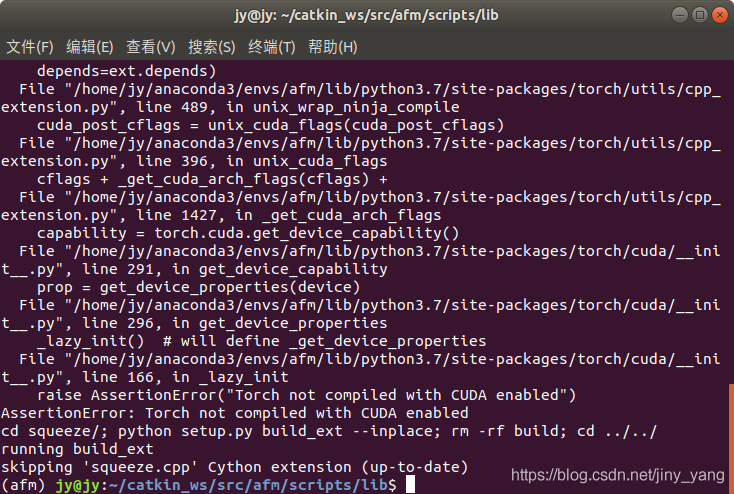
然后进入到catkin_ws文件夹进行编译.
cd ../../../../
catkin_make
source ~/catkin_ws/devel/setup.bash
2、 安装ROS版VINS-Mono :
直接gitclone然后编译,如果前面的afm安装好了,这里应该没有问题。可能会有一些c++库没有安装,直接安装就是,用的库和VINS-Mono所需要的差不多。
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
最终编译结果如下图所示.
3、在 EuRoC数据集运行测试 :
为了适应本算法的单目的场景,需要使用2d-3d-pose-tracking文件夹下面的vins_rviz_config.rviz把VINS-Mono\config下面自带的vins_rviz_config.rviz给替换掉。
并且需要进入VINS-Mono\config\euroc\euroc_config.yaml 文件,把 freq改为 15.
需要注意的是,由于ROS只支持python2,所以这里我们必须使用python2+pytorch才能运行,否则在第二个命令的时候会报错。
roslaunch vins_estimator euroc.launch
roslaunch map_fusion euroc_tracking.launch
roslaunch vins_estimator vins_rviz.launch
rosbag play YOUR_PATH_TO_DATASET/V1_02_medium.bag
运行结果就是本文开头的那张图了。
编译运行就此结束,俺读代码去了嘞~~
编译运行有问题欢迎在评论区留言.
")


评论(0)
您还未登录,请登录后发表或查看评论