这片博客 教你 如何使用TF2 实现 监听 获得 一个 坐标变换 在上一篇博客 创建了一个TF2 的 广播者 ,来发布一个 乌龟的位置 到 TF2, 这个博客 将 创建 一个 TF2 的 监听者 来开始使用TF2. 1、如何创建一个TF2的监听者 1.1 代码 在learning_tf2 的功能包的src 文件夹下 创建一个新的cpp文件 命名为 turtle_tf2_listener.cpp.
rosdep update time out及失败解决方案 在此之前,我已经撰写了一篇名为 sudo rosdep init Error ROS安装问题解决方案 博客并提供了各类解决方案,这些方案是在2020年4月29日提出并经过了一定的质检,可谓屡试不爽;本以为该问题已经被解决,直到今年把师兄的系统搞崩重装系统后发现该问题已经无法通过之前的办法解决。 于是痛定思痛,整理了一篇新的解决方案以应用该
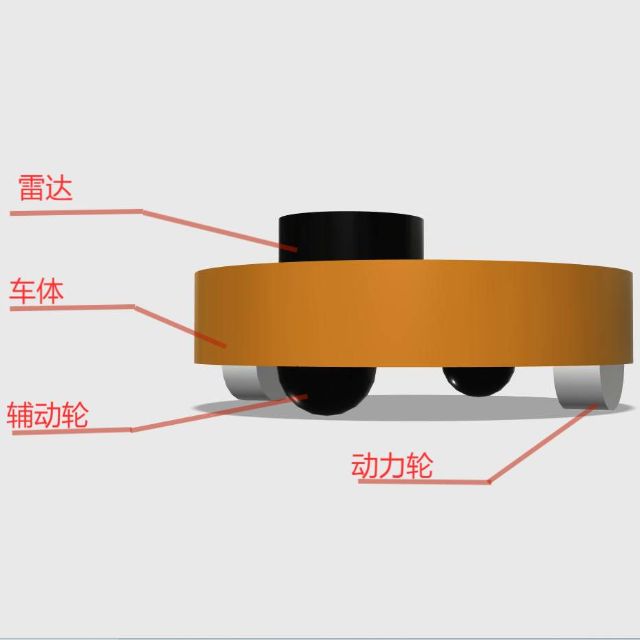
本片博客 讲解 如何添加 一个 固定的坐标系 到TF2 1、为什么添加 坐标系 对于很多任务在本地坐标系中处理很容易。例如激光雷达的数据在以雷达扫描器的中心为坐标系下最容易处理。TF2 可以定义一个本地坐标系对每一个传感器、link等等。tf2将处理所有引入的坐标系转换。 2、坐标系添加到了哪 TF2 对所有 的 坐标系 建立 了 一个 树行 结构 , 在整体结构中 不 能 存在闭环。也就
AMCL中轮式里程计误差模型参数 用了很久的AMCL,也偶尔会思考odom_alpha1,odom_alpha2,odom_alpha3,odom_alpha4这些如何参数如何根据我们轮子的精度来给出理论上比较准的值,而不是凭借实验中调出来的值(总感觉不专业),因此这次决定好好理一理。 一.diff模型与diff-corrected区别 结论:diff-corrected模型才是《概率机器人》中里
ROS TF2 介绍tf2 1、安装演示示例 2、运行演示示例 3、如何实现的 4、tf2 工具 4.1 view_frames 4.2 tf_echo 4.3 rviz 编写tf2静态广播器(C ++) 1、创建 learning_tf2 功能包 2、How to broadcast transforms 2.1 代码 2.2 代码解释 3、编译 运行 4、检查结果
汇总 无人机目标跟踪与运动控制①——Gazebo仿真环境搭建 无人机目标跟踪与运动控制②——运动指令与视觉图像 无人机目标跟踪与运动控制③——硬件准备与目标跟踪 无人机目标跟踪与运动控制④——串级反馈与轨迹跟踪 无人机目标跟踪与运动控制⑤——多无人机编队 [待更新] 0. 前言 在上一篇文章:“Gazebo下无人机目
前几日有学弟问我,ros如何跟下位机通信呢? 我的第一反应就是rosserial通信协议,rosserail是用于非ROS设备与ROS设备进行通信的一种协议。它为非ROS设备的应用程序提供了ROS节点和服务的发布/订阅功能,使在非ROS环境中运行的应用能够通过串口或网络能够轻松地与ROS应用进行数据交互。 学弟听后兴高
基于ROS-Serial和Arduino实现控制六轴舵机机械臂 不久之前我在古月学院上架了《软硬结合带你玩转ROS机械臂》的课程,课程里面我们通过Arduino Nano和ROS的结合实现了机械臂在ROS系统下的驱动。有些细心小伙伴已经加到我的QQ开始更深层次的交流学习,不知道你们有没有发现呢~ 在课程当中,我使用的是基于StandardFi
URDF(Universal Robot Description Format)——通用机器人描述格式,它是ROS里边使用的一种机器人的描述文件,包含的内容有:连杆、关节,运动学和动力学参数、可视化模型、碰撞检测模型等。 到目前为止,本文的主要内容有两个:(1)将solidworks里绘制的三连杆机械臂的三维模型转化为URDF文件,并在rviz中打开;
1.pcl_tutorial官方给的模板 int main(int argc, char** argv) { pcl::PCLPointCloud2::Ptr cloud (new pcl::PCLPointCloud2 ()); pcl::PCLPointCloud2::Ptr cloud_filtered (new pcl::PCLPointCloud2 (
在ROS中点云的数据类型 在ROS中表示点云的数据结构有: sensor_msgs::PointCloud sensor_msgs::PointCloud2 pcl::PointCloud<T> 关于PCL在ros的数据的结构,具体的介绍可查 看 http://wiki.ros.org/pcl
Moveit的前身是PR2机器人的机械臂的代码包,之后被集成为一个软件包。它不仅可以实现单个机械臂的控制。而且可以实现两个机械臂的协调控制。而且可以RGB摄像头采集外部障碍物信息,完成自主避障这样的功能。由一系列移动操作的功能包组成,运动规划,操作控制,3D感知,运动学,控制与导航算法。同时提供友好的GUI界面。系统架构如下图所示: 在这里面有
在用机器人和激光雷达跑SLAM算法构建地图时,总感觉激光雷达数据在RVIZ中显示的方向有问题(前提是激光雷达的安装方向正确),知道是tf坐标转换存在问题,但一直没有调整到好的状态,所以查了些相关资料,终于搞明白了ROS中的坐标转换是怎么回事,于是记录下来。 一、首先要搞明白URDF、TF和odom的关系 ROS 中对于多坐标系的处理是使用树型表示,在机器
目录 目录 ROS 传感器消息 ROS 传感器消息之Laserscan 消息定义 测试代码 ROS 传感器消息之PointCloud 消息定义 测试代码 小结 Reference ROS 传感器消息 在使用ROS各个传感器消息之前,弄清
1.数据格式 在ROS中点云的数据类型 在ROS中表示点云的数据结构有: sensor_msgs::PointCloud sensor_msgs::PointCloud2 pcl::PointCloud< T > 关于PCL在ros的数据的结构,具体的介绍可查 看 wiki.ros.org/pcl/Overview 关于sensor_msgs::P
做SLAM的硬件要求(不一定是必须的,看包和库的依赖): (1):差分轮式机器人,可以使用Twist速度指令控制,需要线速度和角速度。 (2):需要激光雷达、深度摄像头等测距设备,可以获取环境深度信息。 (3):最好使用正方形和圆形的机器人,其他外形的机器人虽然可以正常使用,但是效果可能不佳。 机器人的深度信息里面需要包含什么内容。可
为什么要利用CMake编译代码并上传到arduino? 当需要开发大点的软件项目,Arduino IDE对代码的管理就变得比较笨拙。 如果你经常想要从命令行或能自动完成的eclipse编译代码 最后你可以通过rosserial_client的CMake基础架构,你利用ROS buildfarm构建和分发固件 这个blog只说一个简单的示例。 老样子,给大家我整理好
机器语音理论识别模型: 在ros里面有一些语音识别的功能包 pocketsphinx:集成CMU Sphinx和Festival开源项目中的代码,实现语音识别的功能。只能识别数据库中的语音。 audio-common:提供了文本转语音(Text-to-speech TTS)的功能实现完成“机器人说话”的想法。
QT rqt_console 收集日志信息,方便做筛选,调试 rqt_plot 订阅某个数据,自行绘制成图表 rqt_image_view 显示摄像头图像 rqt 一个rqt汇总工具箱,包
文章目录 ① 背景 ② 前提 ③ 任务 Ⅰ 准备 Ⅱ 写py文件 Ⅲ 启动 rqt_graph 看系统 ④ 总结 ① 背景 这个launch 是.py 文件,和ros1 差别很大 到目前为止,在教程中,您一直在为运行的每个新节点打开新终端。当您创建越来越
第三方账号登入
看不清?点击更换


























第三方账号登入
QQ 微博 微信