好家伙,python傅里叶变换这个问题还是被人拿出来讨论了。 我第一次接触的Python的时候,发现代码块之间竟然是用缩进来区分的,一时间还难以适应。 不过写了几十行代码后很快就适应了,还觉得用缩进有那么点独特性 因为强制缩进的话,代码写完后天然地就是排版好的。python 生成exe不需要刻意做格式化处理。我记得刚开始写python代码用的是vim。 用的vim的都是知道
卡尔曼滤波的基本原理可以参考: ARUANTOU:基础卡尔曼滤波 我们都知道卡尔曼滤波在噪声和量测噪声为不相关、零期望的白噪声,且是线性系统,初始时刻的状态估计是无偏的条件下,才能保持无偏的特性。而具有无偏特性的卡尔曼滤波算法是有解的,可以计算出最终的定位位置。也称可观的。 要理解可观性,我们需要先看看带有输入误差的卡尔曼滤波。 现实是存在很多非线性的运动,以及未知的测量和运动误差。这
力觉与智能 视觉可以提供丰富的学习材料,以供机器人学习。人类从一无所知的婴儿成长为经验丰富的智者,这一过程我们也会通过视觉获取各种信息。然而,若只有视觉材料显然不足以让人类变得这么智能。在这其中,力觉信息也发挥了同等重要的作用。 所谓的力觉信息,就是人类感知到与外界环境产生的交互力信息。婴儿的步态总是千奇百怪的,在他们不断练习行走的过程中,会根据地面与脚底的接触力,纠正腿部肌肉收缩
Power PMAC中PLC程序及子程序的编写1. PLC程序的编写2. 使能和关闭PLC程序的方法3. PLC中运行运动程序的方法4. PLC调用子程序的方法5. 子程序的编写1. PLC程序的编写对于PLC程序的语法结构与运动程序prog写法相同,不再赘述,需要请翻看文章《Power PMAC运动控制器 —— 学习笔记2》,其他可以在PLC中使用的函数或者符号请在手册《Power PMAC S
底层最开始有很多比较简单的改进的地方 首先防守策略在bhv_basic_move.cpp中,铲球的可以尽可能的铲 ,但是前提是不存在队友可踢,否则就是铲自己人的铁憨憨if(!wm.existKickableTeammate()),角度用60比较合适Bhv_BasicTackle(0.1,60.0) 之后通过观察比赛,我们发现一个逻辑漏洞就是,如果我与球小于3m 或者 我是全队最接近球并且比对方
当我们获得了基于最小惯性参数集的机器人动力学方程tau=Yr*pr后,即可通过系统辨识的方法获取最小惯性参数集Pr。而在辨识前,我们需明确离散系统辨识与连续系统辨识的区别。 实际的物理系统是用微分方程描述的连续系统: (1) 这里的ai和bi就是我们需要辨识的系统参数。 连续系统辨识 通过实验和状态估计的方法,获取系统的输入输出,及其各阶导数,方程(1)可写为如下形式
在MIT cheetah的controller中共有10运动状态(运动模式),分别为:PASSIVE、JOINT_PD、IMPEDANCE_CONTROL、STAND_UP、BALANCE_STAND、LOCOMOTION、RECOVERY_STAND、VISION、BACKFLIP、FRONTJUMP。每种运动状态分别对应了一种机器人运动模式,例如奔跑LOCOMOTION、后空翻BACKFLIP
Power PMAC中正逆运动学的实现1. 为什么要使用正逆运动学 ?2. 怎样创建正逆运动学子程序 ?3. 如何编写运动学程序?3.0 预备工作3.1 逆运动学3.2 正运动学3.3 运动学在C语言中的实现4. 官方例程讲解5. 机械臂运动学讲解声明1. 为什么要使用正逆运动学 ?正运动学:通过各关节角度求坐标系下的位姿逆运动学:给定坐标系下的位姿,反解各关节角度
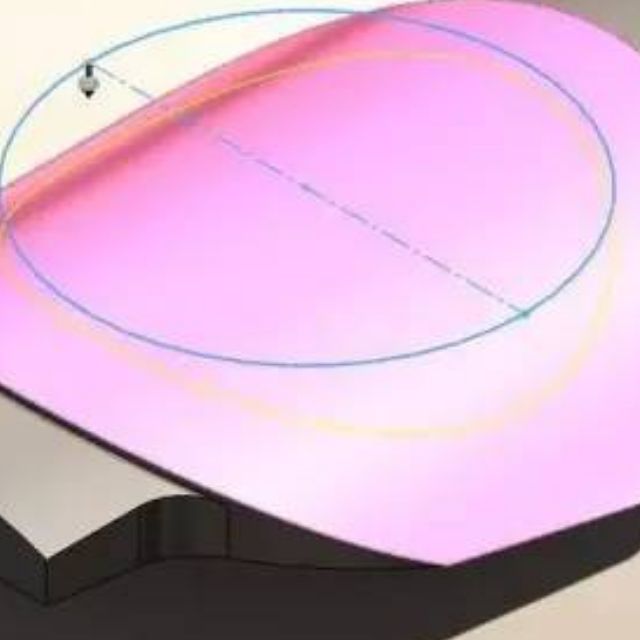
我们使用solidworks做复杂的零件设计时,比如绘制液压阀块、发动机的气缸盖、各种变速箱壳体,由于零件内部结构比较复杂,从外部观看视野有限,我们在做方案时希望能够看清零件的内部结构。 正因为此类问题的出现,solidworks装饰螺纹线给我们提供了一种透视图的方式,我们可以对零件的面、特征、实体设置透明度,从而显示零件的内部结构。 设置好透明度的零件,我们不但可以看清楚零件的内部结
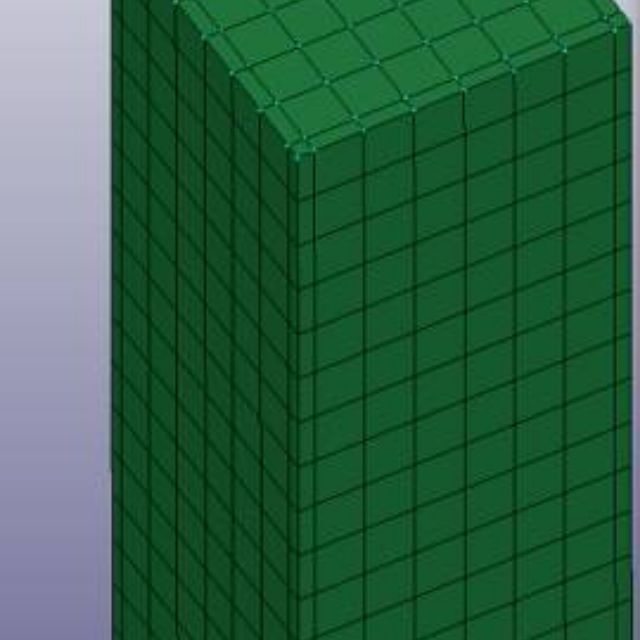
1、有限元概述 将求解域分解成若干小域,ansys有限元模型由单元组成,单元之间通过节点连接,并承受载荷,节点自由度是随着连接该点单元类型变化的。 1.1分析前准备 (1)研读相关理论基础; (2)参考别人的分析方法和思路; (3)考虑时间和设备,做适当的简化假设,设定条件、材料并决定分析方式; (4)了解力学现象、分析关键位置并预先评估。 1.2 Von Mises
LocalMap主要用于构建局部地图数据,这里对于构建地图所需要的Mappoint和位姿的优化ORBSLAM的做法给了我很多启发,来看下ORBSLAM是如何更新Mappoint和位姿的。 while(1) { // Tracking will see that Local Mapping is busy SetAcceptKeyFrames(
引言在进行电机矢量控制时,需要通过坐标变换将三相电流ia,ib,ic转换为id,iq,要实现正确的坐标变换,必须知道电机转子的准确位置,很多电机安装有霍尔传感器,根据霍尔传感器在任何状态都可以准确的确定电机转子所在扇区,但是有些高精度电机采用旋转变压器,或通信式绝对位置传感器做位置传感器,传感器的机械0点和电气0点又常常有偏差,这时就有了初始角度辨识的需要。 文章目录引言1、 辨识原理2、仿真验
环境的一些问题 最近在使用rcssserver 和 rcssmonitor时可能会遇到./configure失败的问题,可以检查一下文件夹是否有makefile文件,如果是编译后的包直接sudo make install,如果还不行,还可以源码下载编译 rcssserver: https://sourceforge.net/projects/sserver/files/rcssserver/
最近在看功能相关的一些内容,其中有一个就是关于代码覆盖率,咋看好像很简单,但是仔细一看又不知道该如何检测,先找了一篇令我恍然大悟的文章,后续更深层次内容再做补充。 个人认为所谓覆盖率可以理解成如何保证代码的顺利运行,比方判断语句有两个分支,当符合条件时会执行语句1,当不符合条件可能执行语句2,那我们可以通过一定的检测方式来验证当前模型按照预期的功能进行实现。比方说你可以通过某个数据a=5和a=1
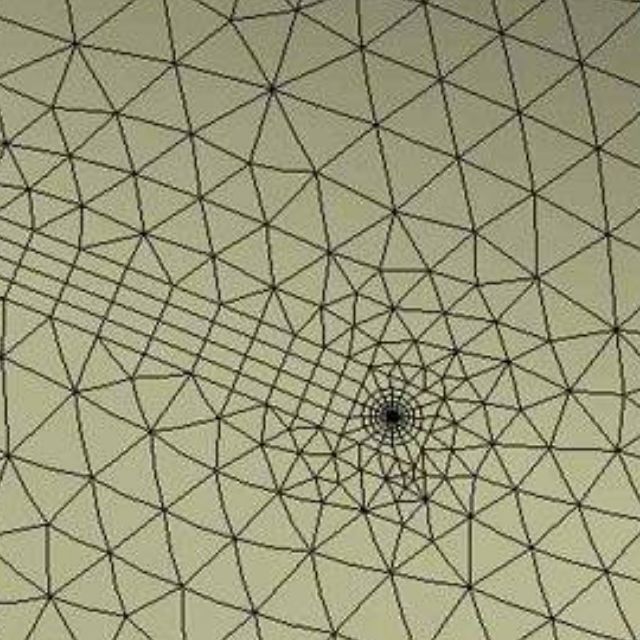
1.引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值
不良的单元形状会导致不准确的结果,然而到目前为止,还没有一个比较通用的标准来判定单元形状的好坏。一种单元形状在一个分析中可能会带来不正确的结果,但在另外一个分析中又可能是完全能接受的,因而单元形状的好坏以及结果的准确性完全由用户根据经验或者相关行业规范进行判定和分析。 所以平时我们在采用ANSYS进行有限元分析时,一个很重要的步骤便是查看网格质量,有时即使网格划分成功了,若质量太差,结果也不一定
Power PMAC中运动程序的编写 —— 下1. 坐标系和轴定义1.1 轴定义1.2 坐标系定义1.3 坐标系及轴的定义例程2. 运动模式的介绍2.1 相对模式与绝对模式2.2 运动模式(直线、圆弧、样条、PVT)3. 运动程序的编写3.1 编写流程3.2 运动程序模板(重要!)4. 数据跟踪5. 编程实例声明1. 坐标系和轴定义定义坐标系的两种方法: 坐标轴定义语句,用于将电机映射到具有简单
图优化理论现在是SLAM领域的主流优化方式,原理知识很多,这里不能一一介绍记录。简单的梳理以下什么是G2O。 个人理解,图优化把优化问题考虑成图的模式。带优化的变量称为顶点,对于待优量的限制条件,设定为边的概念,就构成了我们理解上的图。 在这里我们把限制条件理解成损失函数,这个函数是优化的关键,我们要通过不断的迭代获取最小的损失,而这又引出了最小二乘法的概念。 上图就是一个单元图,只
机器人动力学研究最基础的是建立完整的动力学方程,这其中最关键的是建立多连杆机构的动力学方程。笔者以经典的PUMA560机器人构型为例,阐述四种不同的机器人动力学形式及函数文件。计算环境为matlab,方便研究者的使用。 拉格朗日形式 这是基于拉格朗日方程所建立的动力学表达式,其形式如下 其中各项的求取过程如下: 基于如上推导过程,笔者写了如下的函数LagrangeRob
全覆盖路径规划(CCPP)算法通常用于机器人特殊作业场景,例如机器人清扫,机器人地面施工等。这类场景通常需要机器人运行路径上的Footprint将区域地面进行全覆盖,从而实现对一个区域的全覆盖作业。早期我们接触的机器人路径规划方法基本上都是一种点到点(PTP)的规划方式,例如A*,D*等等,它们的特点是绕障、运行路径最短及无平滑,相信国内很多刚接触移动机器人规划算法的同学,也是从它们开始接触路径规
第三方账号登入
看不清?点击更换





















第三方账号登入
QQ 微博 微信