注:本篇博文全部源码下载地址为:Git Repo传送门。 1. 下载到本地后解压到当前文件夹然后运行:catkin_make 编译。 2. 源码是在 Ubuntu14.04 + Indigo 环境下编写。 前面博文已经介绍了机器人平台的机械结构设计、嵌入式硬件平台的搭建等内容,从本片开始介绍本开源机器人平台ROS系统的相关程序,主要有: ROS系统建模; Gazebo仿真; ROS系统机
8. 字符串转换整数 (atoi) class Solution(object): def myAtoi(self, s): """ :type s: str :rtype: int """ s = s.strip() if len(s) == 0: return 0
1.强化学习方案 生物最大的特点是在完全对外部世界不存在精确模型的前提下通过环境交互获取奖励提高智能体对环境的认识(强化学习),通过专家的评判和标签构建正确与不正确的模糊映射(深度学习)从而用实现用时间换经验的方式,提高环境模型的精度采用简单的方法论能适用于不同的任务。 对智能体训练最有名的工作就是由Google DeepMind提出的AlphaGo项目其通过计算机上万次的模拟博弈与学习超越了人
一、概述 所谓嵌入式,其实就是专用的微型计算机系统,包括嵌入式硬件和嵌入式软件两个部分。嵌入式硬件通常是由32位(或以下)的微处理器及其相关外设组成;嵌入式软件则是写入嵌入式硬件的用于实现特定功能的程序。笔者总结了一下,嵌入式具有以下几个方面的特点: 专用性。(一般是面对特定应用场景进行专门开发) 实时性。(虽然嵌入式微处理器一般计算能力不高,但是因为“专片专用,定向开发”,因此具有良好的实
综上,可见采用刚体降维解耦的方式可以较好地简化机器人控制并能将该方法向多种不同构型的机器人进行推广,姿态、位置控制算法只需要关心刚体位姿控制问题,而具体这些虚拟控制力和力矩如何通过执行器输出则可采用不同的力分配原理就行,最终构建成一套完成的反馈控制系统,但由于该方法忽略了躯干质量和惯性使得在真实机器人系统中可能无法保证对期望质心运动轨迹跟踪的精度,因此在上述反馈控制的基础上进一步结合能量前馈控制就
本机器人机械结构设计相关的所有设计文件下载地址为:传送门 其中包含:三维造型设计文件(所有零件+装配效果)(tips:基于Solidworks 2015 绘制) 非标加工的零件图纸(PDF格式+Dwg格式) 本开源机器人项目首要目的是让感兴趣的朋友花很少的钱就能玩转功能简单的机器人,了解机器人的搭建过程并学习ROS系统(如机器人SLAM),因此结构设计的目标和原则很明确:设计一款轮式机器人,满
之前在项目中心发了一个开源项目——基于ROS MoveIt!的Scara机械臂设计,计划是8月20号开始,为期一个月的开发工作。现在已经有二十多个小伙伴联系我们开始一起动手进行开发啦~ 很多接触这个的小伙伴还只是萌新,想通过这个项目的学习来对自己做一个技能提升,这里我们也来关照一下这些同学们,这里我们先来分析下整个的项目的设计及准备工作。 通过和大家的交流,我们最终确定选择这款机械臂进行ROS开发
1.嵌入式机器人主控处理器 1.1意法半导体STM32系列 目前意法半导体的STM32系列是采用率很高的低成本机器人主控芯片,目前其面向伺服系、机器人和无人车推出了多种不同算力性能的单片机处理器,覆盖了STM32F0/F1/F2/F3/F4/F7/L0/L1/L4等多个产品系列。以ARMCortex-M4的STM32F4系列MCU为例,其主频为180MHz能满足目前无人机所需要姿态解算、PID
在一起做四足7中我们提到了基于强化学习实现的机器人步态算法,其中以OpenAI最先在真实机器人上进行了实现而目前ETH提出的强化学习框架甚至超过了传统动态稳定控制算法实现的效果。Pybullet是许多强化学习算法应用训练采用的物理引擎,github上许多强化学习的工程特别是在足式机器人方面的基本都基于该引擎进行试验,因此要学习强化学习首先需要按装pybullet物理引擎,同时也能将其当做一个仿真平
在开始介绍本开源项目的机械结构设计之前,先和博友们用一篇博文分享一下机械设计工作相关的特点、性质。抛出结论:笔者觉得在机器人领域,机械结构设计基本上是决定一个产品能否实现或超预期实现预设功能的关键之一,因为一切上层软硬件都是基于机械本体完成的。 一、机械结构设计思考 机械结构设计是一种看着门槛比较低,实际上有需要非常专业的知识背景作为支撑,经过长期的经验积累才能成为合格的结构设计工程师,
1.三通道解耦控制理念 Raibert所写的《Legged-Robots-That-Balance》可以说是足式机器人必读的书籍,其中提出了经典的三通道足式机器人控制框架,通过降维的方式实现对足式机器人非线性动力学模型的解耦同时引入虚拟腿和虚拟弹簧的概念使得整个算法在有精确可靠的系统状态估计下,能采用简单的PD控制律实现并能获取较好的控制性能和抗外力作用性能,下面对本文中的核心算法进行简单的总结。
6. Z 字形变换 class Solution(object): def convert(self, s, numRows): """ :type s: str :type numRows: int :rtype: str """ if len(s) == 1 or numRows == 1:
目前经过下面过程基本库预编译都不会报错,但是在make的时候会出现c++ no-pie的错误,我也不知道为什么,通过强行删除对应cmakelist文件中该标志位貌似解决该问题,但是仍出现了一些文件缺失(大部分都是ipopt的),目前任然在尝试如解决这些问题会更新帖子。 (9.3号更新已经成功在14.04虚拟机中编译运行成功,如在其他环境中遇到编译问题可参考该贴)。 如果没兴趣尝试请不要参考该贴或者
4. 寻找两个正序数组的中位数 class Solution(object): def findMedianSortedArrays(self, nums1, nums2): """ :type nums1: List[int] :type nums2: List[int] :rtype: float """
注:标题即题目链接 1. 两数之和 我采取了暴力的遍历方法: class Solution(object): def twoSum(self, nums, target): """ :type nums: List[int] :type target: int :rtype: List[int] """
1 2 3 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 欢迎关注我的开源四足机器人项目!!
摘要: 强化学习技术在近年来得到了快速的发展,其在游戏、自动驾驶和机器人领域中都具有了不少成功应用的案例,研究人员针对强化学习技术提出了许多算法实现在无模型下借助智能体与环境交互学习复杂的技能,但其仍然存在着许多问题需要解决,比如如何加快网络的训练、更精细的提供对任务具体指标的训练结果等。 在将强化学习技术应用于实际机器人中同样面临着很大的挑战,除了训练数据集难以获取外建模误差、传感器测量误差都
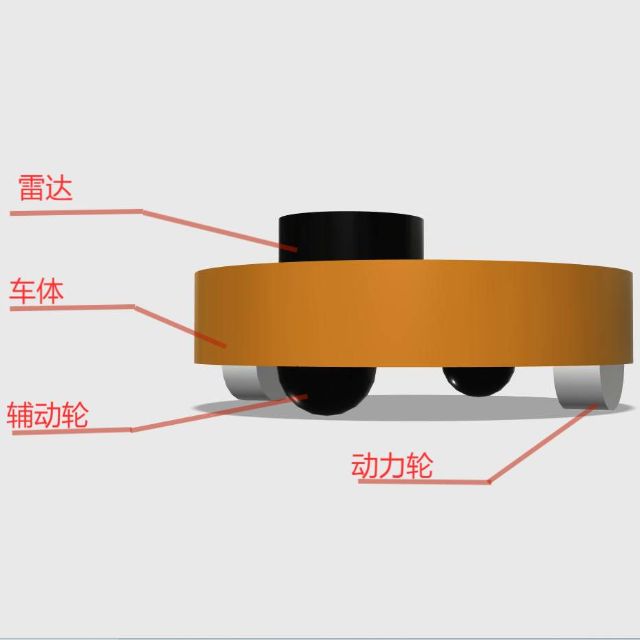
一、是什么开源项目? 从本博文开始将开源一个基于ROS系统的自主移动机器人项目,该项目基于一个差动轮机器人平台展开,机器人的设计效果图和实物图如下图1所示。 图1 设计图和实物图 所有涉及该机器人的设计文件和组成构件将全部通过BSD协议开源,具体开源的内容为: 1. 机械结构设计文件。 为了尽可能的降低成本,本机器人
足底传感器 首先使用双面胶裁剪一小块贴在小圆片槽上以增加摩擦力 然后将其与开关对应凸出安装,并黏贴足底减震 首先采用下图的方式安装空槽足底件和两个小腿 从底部安装开关,并用对应塑料螺母固定 焊接转接板 使用4P线将其与控制器对应舵机口后的4P端子连接,走线可以从机臂空槽中过去(官方机架) 采用同样的方式安装4条腿,主要要保证软垫均朝向下方 使能足底传感器首先需要查看vmc_al
前言 各位,这次这个标题是不是看起来很舒服,哈哈,我还不知道你们!!!当然啊,这次的文章主要是分享文章,怎么能摸鱼呢,我可是正经人。之所以写这篇文章呢,是因为我的学妹找我哭诉,说用ubuntu没有合适的沟通工具,和队友发个发送文件都只能使用邮箱好麻烦,当学长的我知道学妹因此不能好好学习的时候真的是痛心疾首(主要是学妹撒娇真的顶不住,啊不是……各位看客可不许动手啊,动手也行,别打脸……诶诶,学妹把刀
第三方账号登入
看不清?点击更换















第三方账号登入
QQ 微博 微信