版权声明:本文为CSDN博主「咸鱼翻书」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。原文链接:https://blog.csdn.net/cheer_me/article/details/111438173文章目录 焊盘Pad 常规焊盘Reguar Pad 热焊盘Thermal Pad 隔离焊盘Anti Pad
IDE下载安装,2017.10.1更新到1.8.5版本了,我安装的版本是1.8.5 官网链接:arduino.cc 选择对应系统的软件版本,我选的是windows版本;arduino-1.8.5-windows.exe 约90.38MB 傻瓜式的安装即可,选择安装目录(我的是 D:\APP_Install\Arduino-1.8.5); 硬件我用的是最经典的UNO R3; 打开的IDE环境如下:
点胶质量检测1. 项目背景2. 具体需求3. 代码案例3.1 halcon代码3.2 自定义函数3.3 完整代码和图片下载 1.项目背景 UV点胶机点热熔胶工位,点胶之后还需要对胶水进行检测,这属于缺陷检测的范畴了。下面这张图像是使用UV线光源从上面打光得到的图像效果,从图像中可以看到,热熔胶由于添加了荧光剂,被UV光源打亮,而电池的其他部分比较暗。下面这张图像是利用背光源从底下打光,而上面U
Generative adversarial network 据有关媒体统计:CVPR2018的论文里,有三分之一的论文与GAN有关由此可见,GAN在视觉领域的未来多年内,将是一片沃土(CVer们是时候入门GAN了)。而发现这片矿源的就是GAN之父,Goodfellow大神。 神。文末有基于keras的GAN代码,有助于理解GAN的原理 生成对抗网络GAN,是当今的一大热门研究方向。在2
前一阵在做机械臂下井字棋的综合设计,在网上直接购买了一套机械臂装置(包括机械臂,摄像头,树莓派,花费1600元),机械臂不是很高级、精度很低。源码里提供识别红绿蓝三种颜色方块的识别和抓取。 经过多次尝试,最终决定井字棋的棋子也采用3cm * 3cm * 3cm的颜色方块。今天就来写一些第一步,而第一步就是解决识别颜色方块的问题。 演示效果图手移动方块,外轮廓始终贴合方块边缘。 代码 使用笔
文章目录软件环境安装MoveltMoveIT控制机械臂1.建立机械臂仿真模型(1)运行仿真建模命令(2)Create New MoveIt! Configuration Package(3)配置self-collision(4)定义关节(5)定义Planning Groups(6)测试机械臂模型(7)定义End Effectors(8)定义ROS Control(8)设置Author inform
LoopClosing是专门负责做闭环的类,它的主要功能就是检测闭环,计算闭环帧的相对位姿病以此做闭环修正。 老规矩,先上一张图,清晰明了 从图里可以看出,这个类最主要的就是三个函数,下面分别介绍 1. DetectLoop:检测闭环 它的主要流程包括: 1)如果地图中的关键帧数小于10,那么不进行闭环检测 2)获取共视关键帧,并计算他们和当前关键帧之间的BoW分数,求得最低分
STM32系列芯片是为要求高性能、低成本、低功耗的嵌入式应用设计的ARM Cortex M0, M0+, M3, M4和M7内核,按照内核架构分成不同的产品。其主流的产品有STM32F0、STM32F1和STM32F3;超低功耗产品STM32L0、STM32L1、STM32L4以及STM32L4+;性能产品STM32F2、STM32F4、STM32F7以及STM32H7。在本文中以介绍笔者使用
引言 这一节使用张正友标定法,讲解相机标定的算法原理,下一节将对手写相机标定代码进行介绍。 相机模型 在工业相机的成像系统中,有四种坐标系,分别是世界坐标系、相机坐标系、图像坐标系和像素坐标系。将三维空间点P在世界坐标系中的坐标记为(Xw,Yw,Zw) ,将相机的光心O所在的平面称为相机坐标系,点P在相机坐标系中的坐标为(Xc,Yc,Zc) 。相机坐标系的x轴和y轴平行于成像平面,z轴垂直于
引言 这个系列将对手眼标定过程中的图片获取、相机标定原理、相机标定时间、罗德里格斯公式、手眼标定原理、手眼标定实践等内容进行讲解。今天先进行第一部分,即图片获取环节。 我们首先需要了解下realsense D435i这一款相机。 Realsense D435i 搭载2000万像素的RGB摄像头和3D传感器,有两种采样模式,分别可以以30帧每秒的速度提供1280*720分辨率的照片,以及90
引言 在前面的文章中,我们介绍了使用函数指针方便的选择不同函数,使用字典实现保存多套参数以待后续训练。但是在程序的运行过程中,仍然需要 1、每次修改PARAMS_SN中当前参数的编号; 2、新开终端,执行训练程序。 服务器可以容纳的同时运行的程序个数最多为14个,即使这样,我们仍然需要经过很多繁琐的操作才能达到我们的目的。 因此为了让训练时操作更加人性化,对传参训练部分进行修改: 1、
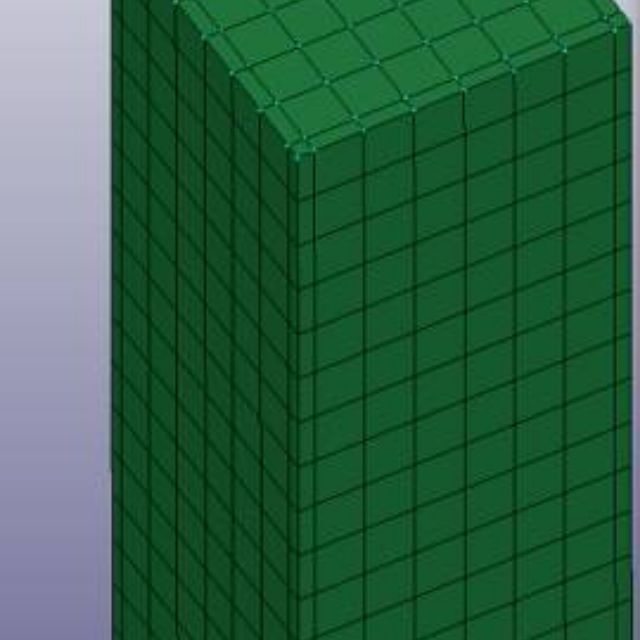
Hypermesh是目前综合功能最强大的有限元前处理器之一。 最近总有朋友问我很多关于Hypermesh的问题,结合我个人的使用经验,写下这篇文章随便谈谈,想到哪里,写到哪里,不一定都对,如果有不同意见,或者反对意见,欢迎切磋。 ①Hypermesh很难学么? 不难,不仅不难,而且很简单,简单到什么地步?如果有人在旁边稍微指点你一下,你只要
树莓派操作系统1 Raspbian OS:官方的树莓派操作系统2 Ubuntu MATE:适合通用计算需求3 Ubuntu Server:把树莓派作为一台 Linux 服务器来使用4 LibreELEC:适合做媒体服务器5 OSMC:适合做媒体服务器6 RISC OS:最初的 ARM 操作系统7 Mozilla WebThings Gateway:适合 IoT 项目8 Ubuntu Core:适
文章目录软硬件环境硬件软件Opencv和ROS发布摄像头数据节点图像接收和处理节点软硬件环境硬件下位机:树莓派4B(4G)上位机:PCUSB摄像头软件上下位机都是Ubuntu 18.04系统ROS melodicOpencv和ROSOpenCV格式图片(或视频帧)和ROS数据格式图片(或视频帧)之间的转换。或者直白点书,通过ROS发送图片(Image)数据类型的消息(message)。 我们只需
Arudino与机械臂电机的连接 需要的材料:ArudinoUNO板子一个,面包板一个,杜邦线若干,小强机械臂自带的锂电池也需要用。如下图 小强机械臂的6个伺服电机,每个电机有三根线,白色是信号线,连接到Arudino的每个端口,我选择的是A0,A1,A2,A3,A4,A5,.。电机的红色线是正极,黑色线是负极,。电池的黑色线是负极,红色线是正极。首先,我们将电池上的正负极对应插到面包板
前言 本文首发于公众号【3D视觉工坊】,原文请见6D姿态估计算法汇总(上),更多干货获取请关注公众号~ 1、DenseFusion: 6D Object Pose Estimation by Iterative Dense Fusion (CVPR2019) 原文链接:https://arxiv.org/abs/1901.04780代码链接:https://github.com/j96w/D
LocalMapping是管理局部地图的类,管理的内容包括关键帧和地图点,所谓管理就是增加、删除和修正位姿。具体的方法在下图中 上图是功能上的概括,下图可以详细的看出它的工作流程 一图胜千言,有了上面这两张图,其实这个类的内容就了解的差不多了,下面我们详细看一下几个主要函数的内容 1. ProcessNewKeyFrame:插入新的关键帧 主要流程: 1)从缓冲队列中取出一帧
使用标定板标定像素当量1. 了解标定板的参数 拿到一块标定板,我们应该如何使用它,或者说该如何了解它的相关参数呢?如果你使用的是标准的圆点标定板,可以参考这篇博客:Halcon 圆形标定板标定基本流程-标定助手操作但是像下面这个长方形的标定板,上面并没有标注我们需要的信息,所以需要我们自己去量出来。我们要测量的最重要的参数就是点间距和点的直径,可以使用刻度尺,也可以使用游标卡尺,测量工具的精度并
1.构建数学模型 即 以上即为世界坐标系到本体坐标系的速度映射矩阵, 该矩阵与底盘的轮系没有关系。 3.麦轮速度解算 由于此处旋转中心与轮轴的连线不垂直于棍子,所以使用向量外积对角速度进行处理。由物理关系 和几何关系 可得 根据上图,将角速度投影到本体坐标轴上,与两轴向速度融合。 可以得到: 以上即为麦克纳姆轮四轮长方形底盘速度解
1、功能介绍 本项目所设计的机器人需要实现的功能为:操作员在操作终端(手机或PC端)通过Wi-Fi连接到小车上Wi-Fi模块所在的网络中,向其发出相关操作指令,在Wi-Fi模块接收相关的数据指令并通过UNO R3单片机对这些数据进行解码,最后按照不同的指令信息利用单片机控制相应的外围电路从而实现遥控控制。与此同时,安装在机器人上的摄像头可以通过Wi-Fi网络将视频信息传递到相应操作终端,只要在同
第三方账号登入
看不清?点击更换
























第三方账号登入
QQ 微博 微信