
最近在尝试自己复现一辆小车,把ros_arduino_bridge刚搞定,现在运行rpdiar_ros功能包下面的rpdiar.launch文件可以通过话题查看障碍数据,雷达也正常工作,但是无法再rviz中查看点云数据,启动另一个脚本文件view_rpdiar.launch则可以看到点云数据,这两个脚本运行时都无法查看到tf树信息?这样会对导航有影响吗?这个问题该如何修复呢?
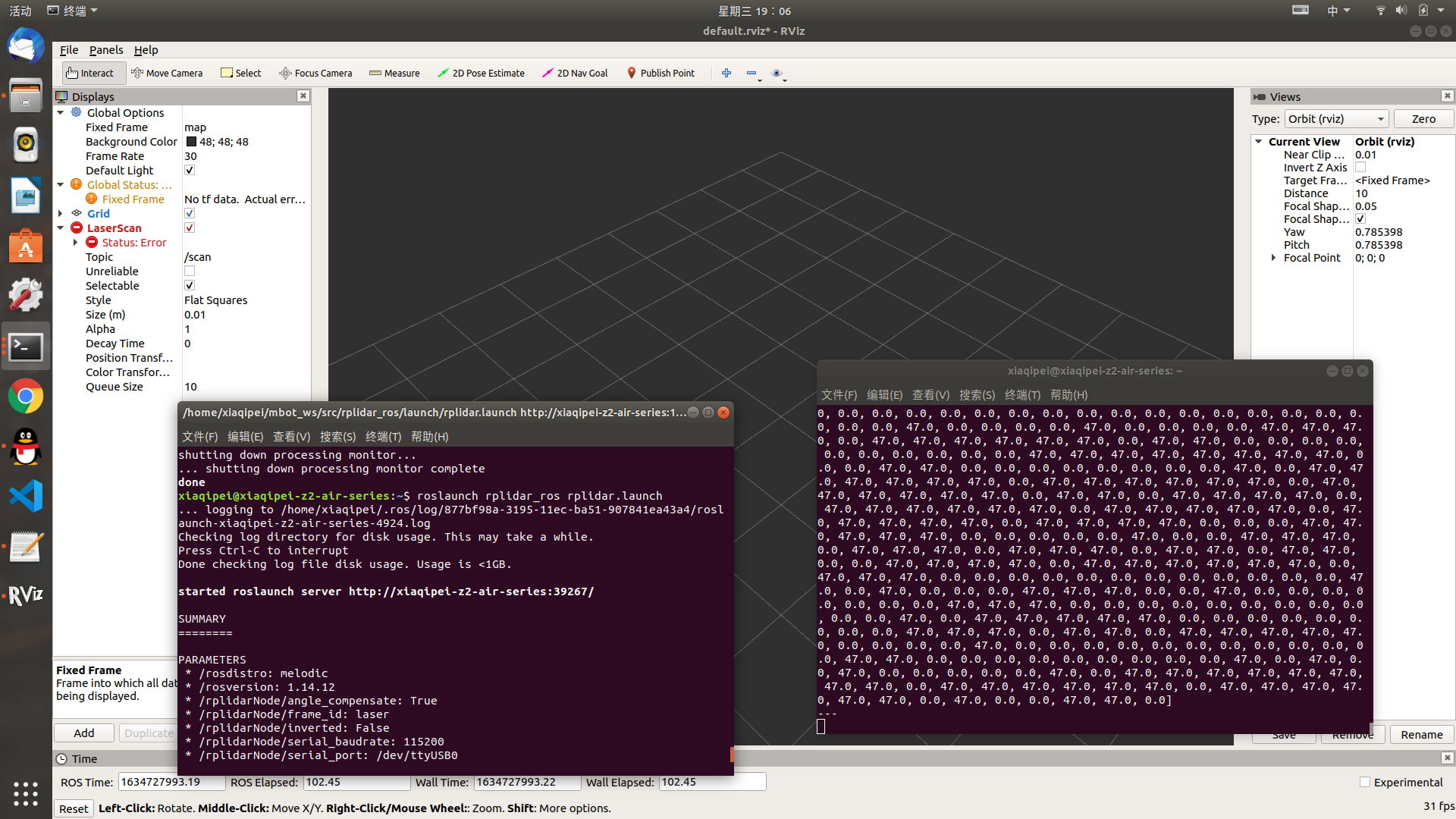
这是两个脚本文件的主要代码,区别就是另一个多启用了一个rviz节点
##rpdiar.launch
<launch>
<node name="rplidarNode" pkg="rplidar_ros" type="rplidarNode" output="screen">
<param name="serial_port" type="string" value="/dev/ttyUSB0"/>
<param name="serial_baudrate" type="int" value="115200"/><!--A1/A2 -->
<!--param name="serial_baudrate" type="int" value="256000"--><!--A3 -->
<param name="frame_id" type="string" value="laser"/>
<param name="inverted" type="bool" value="false"/>
<param name="angle_compensate" type="bool" value="true"/>
</node>
</launch>
##view_rpdiar.launch
<!--
Used for visualising rplidar in action.
It requires rplidar.launch.
-->
<launch>
<include file="$(find rplidar_ros)/launch/rplidar.launch" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find rplidar_ros)/rviz/rplidar.rviz" />
</launch>请问大佬们,这个tf问题该如何解决呢?




第三方账号登入
QQ 微博 微信