
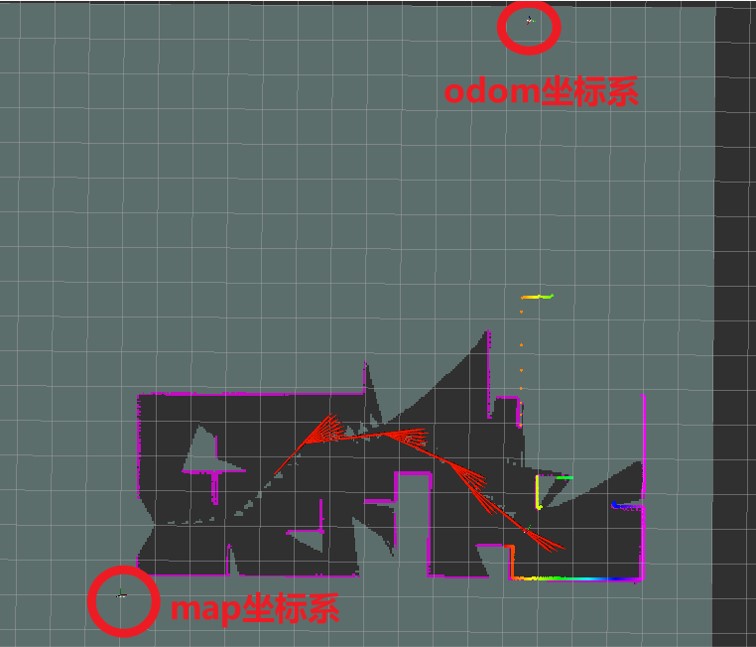
我在stdr下进行gammping算法的仿真,在实验过程中,我发现map->odom的tf转换值随时间不断增大(即便仿真机器人在原地不动也会一直增大),过一段时间以后,map和odom的坐标系就距离这么远了,但建图好像没有什么问题,有大佬能告诉一下为什么会这样吗?
我在stdr下进行gammping算法的仿真,在实验过程中,我发现map->odom的tf转换值随时间不断增大(即便仿真机器人在原地不动也会一直增大),过一段时间以后,map和odom的坐标系就距离这么远了,但建图好像没有什么问题,有大佬能告诉一下为什么会这样吗?
您还未登录,请登录后发表或查看评论




第三方账号登入
QQ 微博 微信