账户与分类
还未登录/注册
登录/注册
首页
博客
全部
OriginBot
OriginCar
智能车竞赛
ROS探索总结
ROS2探索总结
ROS入门教程
ROS
建图导航
运动控制
自动驾驶
机器视觉
机器学习
建模仿真
机器人学
ROS2入门教程
硬件电路
创客DIY教程
智能机器人创意大赛
ROS史话36篇
学习笔记
ROS2
技术前沿
行业资讯
古月居社区公告
RDK开发套件
机械臂控制
嵌入式开发
Linux
泡泡
古月学院
项目
校企服务
竞赛
通知
搜索
搜索历史
清空
热门搜索
人机交互
安装
rosdep update
视觉
LOAM
发布
20
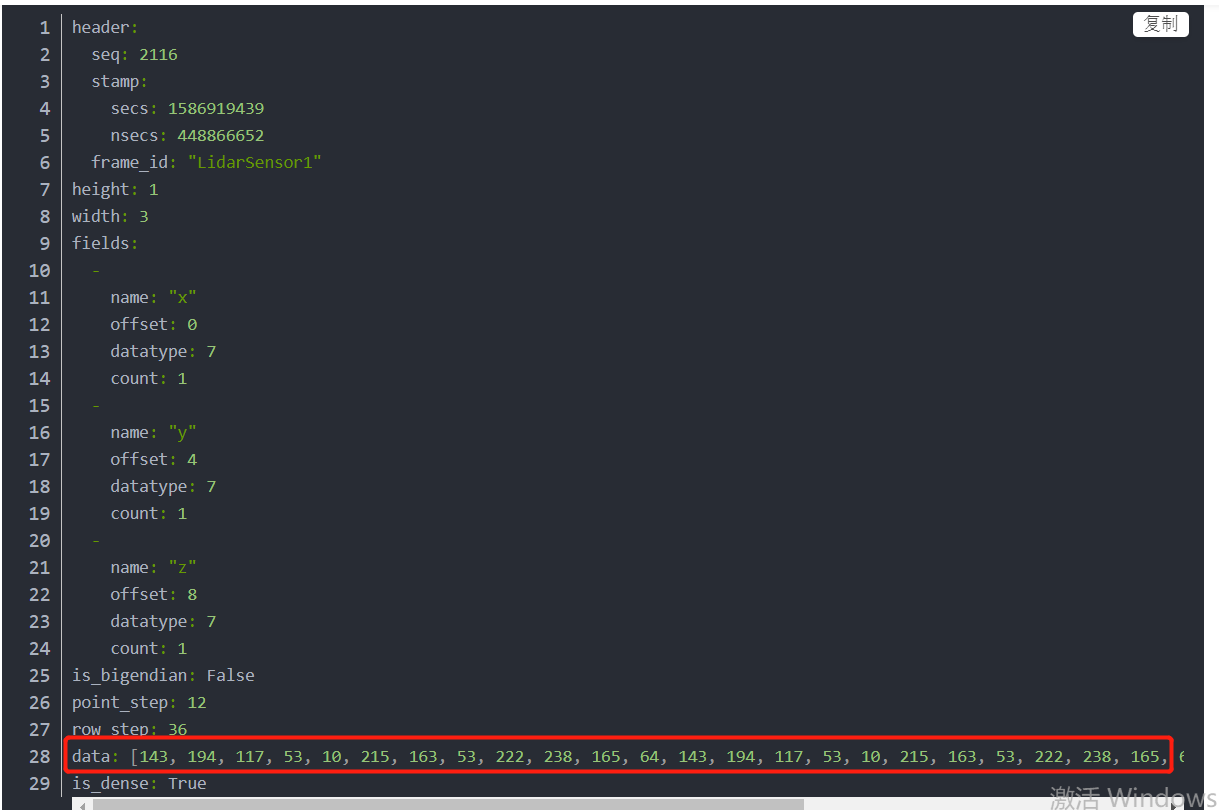
sensor_msgs/PointCloud2数据结构中的data[]中的数据什么含义 和XYZ坐标什么关系
605801548c038
2021-05-27 20:09
3191人阅读
已
点赞
1
已
关注
1
写评论
邀请回答
分享
微信
微博
QQ
链接
评论(6)
您还未登录,请
登录
后发表或查看评论
推荐泡泡
大佬们,rviz建的3d地图怎么保存
rviz多机器人仿真没有显示,tf树显示odom与base_link断开
ROS的TCP发布
基于cosmap交通管理论文复现求助
5积分
求助各位大佬,这个问题怎么解决,failed to build tree
在ROS中编译cartographer时遇到报错
ROS
533人加入
392个泡泡
加入
ROS技术交流,快来呀
加入
热门泡泡
ros学习路线
30积分
TF_REPEATED_DATA ignoring data错误
各位大佬,有什么ROS定位算法推荐吗
5积分
ros中启动gazebo时报错
5积分
求助各位大佬,这个问题怎么解决,failed to build tree
您尚未邀请他人回答
想获取更多信息和操作,请移步电脑网页版
手机快捷登录
帐号密码登录
中国大陆
中国香港
中国澳门
中国台湾
马来西亚
印度尼西亚
菲律宾
新加坡
泰国
日本
韩国
塔吉克斯坦
哈萨克斯坦
越南
土耳其
印度
巴基斯坦
阿富汗
斯里兰卡
缅甸
伊朗
亚美尼亚
东帝汶
文莱
朝鲜
柬埔寨
老挝
孟加拉国
马尔代夫
黎巴嫩
约旦
叙利亚
伊拉克
科威特
沙特阿拉伯
也门
阿曼
巴勒斯坦
阿联酋
以色列
巴林
卡塔尔
不丹
蒙古
尼泊尔
土库曼斯坦
阿塞拜疆
乔治亚
吉尔吉斯斯坦
乌兹别克斯坦
英国
德国
意大利
法国
俄罗斯
希腊
荷兰
比利时
西班牙
匈牙利
罗马尼亚
瑞士
奥地利
丹麦
瑞典
挪威
波兰
圣马力诺
匈牙利
南斯拉夫
直布罗陀
葡萄牙
卢森堡
爱尔兰
冰岛
阿尔巴尼亚
马耳他
塞浦路斯
芬兰
保加利亚
立陶宛
拉脱维亚
爱沙尼亚
摩尔多瓦
安道尔共和国
乌克兰
南斯拉夫
克罗地亚
斯洛文尼亚
波黑
马其顿
梵蒂冈
捷克
斯洛伐克
列支敦士登
秘鲁
墨西哥
古巴
阿根廷
巴西
智利
哥伦比亚
委内瑞拉
福克兰群岛
伯利兹
危地马拉
萨尔瓦多
洪都拉斯
尼加拉瓜
哥斯达黎加
巴拿马
圣彼埃尔
海地
瓜德罗普
玻利维亚
圭亚那
厄瓜多尔
法属圭亚那
巴拉圭
马提尼克
苏里南
乌拉圭
埃及
南非
摩洛哥
阿尔及利亚
突尼斯
利比亚
冈比亚
塞内加尔
毛里塔尼亚
马里
几内亚
科特迪瓦
布基拉法索
尼日尔
多哥
贝宁
毛里求斯
利比里亚
塞拉利昂
加纳
尼日利亚
乍得
中非
喀麦隆
佛得角
圣多美
普林西比
赤道几内亚
加蓬
刚果
扎伊尔
安哥拉
几内亚比绍
阿森松
塞舌尔
苏丹
卢旺达
埃塞俄比亚
索马里
吉布提
肯尼亚
坦桑尼亚
乌干达
布隆迪
莫桑比克
赞比亚
马达加斯加
留尼旺岛
津巴布韦
纳米比亚
马拉维
莱索托
博茨瓦纳
斯威士兰
科摩罗
圣赫勒拿
厄立特里亚
阿鲁巴岛
法罗群岛
摩纳哥
澳大利亚
新西兰
关岛
瑙鲁
汤加
所罗门群岛
瓦努阿图
斐济
科克群岛
纽埃岛
东萨摩亚
西萨摩亚
基里巴斯
图瓦卢
科科斯岛
诺福克岛
圣诞岛
美国
加拿大
夏威夷
阿拉斯加
格陵兰岛
中途岛
威克岛
维尔京群岛
波多黎各
巴哈马
安圭拉岛
圣卢西亚
巴巴多斯
牙买加
南极洲
发送验证码
登录/注册
未注册手机验证后自动登录,注册即代表同意
《用户协议》
第三方账号登入
QQ
微博
微信
记住密码
忘记密码?
登录
未注册手机验证后自动登录,注册即代表同意
《用户协议》
第三方账号登入
QQ
微博
微信
忘记密码
1 身份验证
2 设置新密码
中国大陆
中国香港
中国澳门
中国台湾
马来西亚
印度尼西亚
菲律宾
新加坡
泰国
日本
韩国
塔吉克斯坦
哈萨克斯坦
越南
土耳其
印度
巴基斯坦
阿富汗
斯里兰卡
缅甸
伊朗
亚美尼亚
东帝汶
文莱
朝鲜
柬埔寨
老挝
孟加拉国
马尔代夫
黎巴嫩
约旦
叙利亚
伊拉克
科威特
沙特阿拉伯
也门
阿曼
巴勒斯坦
阿联酋
以色列
巴林
卡塔尔
不丹
蒙古
尼泊尔
土库曼斯坦
阿塞拜疆
乔治亚
吉尔吉斯斯坦
乌兹别克斯坦
英国
德国
意大利
法国
俄罗斯
希腊
荷兰
比利时
西班牙
匈牙利
罗马尼亚
瑞士
奥地利
丹麦
瑞典
挪威
波兰
圣马力诺
匈牙利
南斯拉夫
直布罗陀
葡萄牙
卢森堡
爱尔兰
冰岛
阿尔巴尼亚
马耳他
塞浦路斯
芬兰
保加利亚
立陶宛
拉脱维亚
爱沙尼亚
摩尔多瓦
安道尔共和国
乌克兰
南斯拉夫
克罗地亚
斯洛文尼亚
波黑
马其顿
梵蒂冈
捷克
斯洛伐克
列支敦士登
秘鲁
墨西哥
古巴
阿根廷
巴西
智利
哥伦比亚
委内瑞拉
福克兰群岛
伯利兹
危地马拉
萨尔瓦多
洪都拉斯
尼加拉瓜
哥斯达黎加
巴拿马
圣彼埃尔
海地
瓜德罗普
玻利维亚
圭亚那
厄瓜多尔
法属圭亚那
巴拉圭
马提尼克
苏里南
乌拉圭
埃及
南非
摩洛哥
阿尔及利亚
突尼斯
利比亚
冈比亚
塞内加尔
毛里塔尼亚
马里
几内亚
科特迪瓦
布基拉法索
尼日尔
多哥
贝宁
毛里求斯
利比里亚
塞拉利昂
加纳
尼日利亚
乍得
中非
喀麦隆
佛得角
圣多美
普林西比
赤道几内亚
加蓬
刚果
扎伊尔
安哥拉
几内亚比绍
阿森松
塞舌尔
苏丹
卢旺达
埃塞俄比亚
索马里
吉布提
肯尼亚
坦桑尼亚
乌干达
布隆迪
莫桑比克
赞比亚
马达加斯加
留尼旺岛
津巴布韦
纳米比亚
马拉维
莱索托
博茨瓦纳
斯威士兰
科摩罗
圣赫勒拿
厄立特里亚
阿鲁巴岛
法罗群岛
摩纳哥
澳大利亚
新西兰
关岛
瑙鲁
汤加
所罗门群岛
瓦努阿图
斐济
科克群岛
纽埃岛
东萨摩亚
西萨摩亚
基里巴斯
图瓦卢
科科斯岛
诺福克岛
圣诞岛
美国
加拿大
夏威夷
阿拉斯加
格陵兰岛
中途岛
威克岛
维尔京群岛
波多黎各
巴哈马
安圭拉岛
圣卢西亚
巴巴多斯
牙买加
南极洲
看不清?点击更换
发送验证码
下一步
完成
修改头像
应用
选择图片
添加你感兴趣的标签
OriginBot
OriginCar
智能车竞赛
ROS
建图导航
自动驾驶
运动控制
机器视觉
机器学习
建模仿真
机器人学
硬件电路
创客DIY教程
智能机器人创意大赛
ROS史话36篇
学习笔记
ROS2
技术前沿
行业资讯
置顶评论
确认将"
"的评论置顶嘛?
取消
确定
删除评论
确认将"
"的评论删除嘛?
取消
确定
举报反馈
举报类型
(必选)
内容涉黄
政治相关
内容抄袭
涉嫌广告
内容侵权
侮辱谩骂
样式问题
其他
举报详情
(选填)
取消
确定





第三方账号登入
QQ 微博 微信