
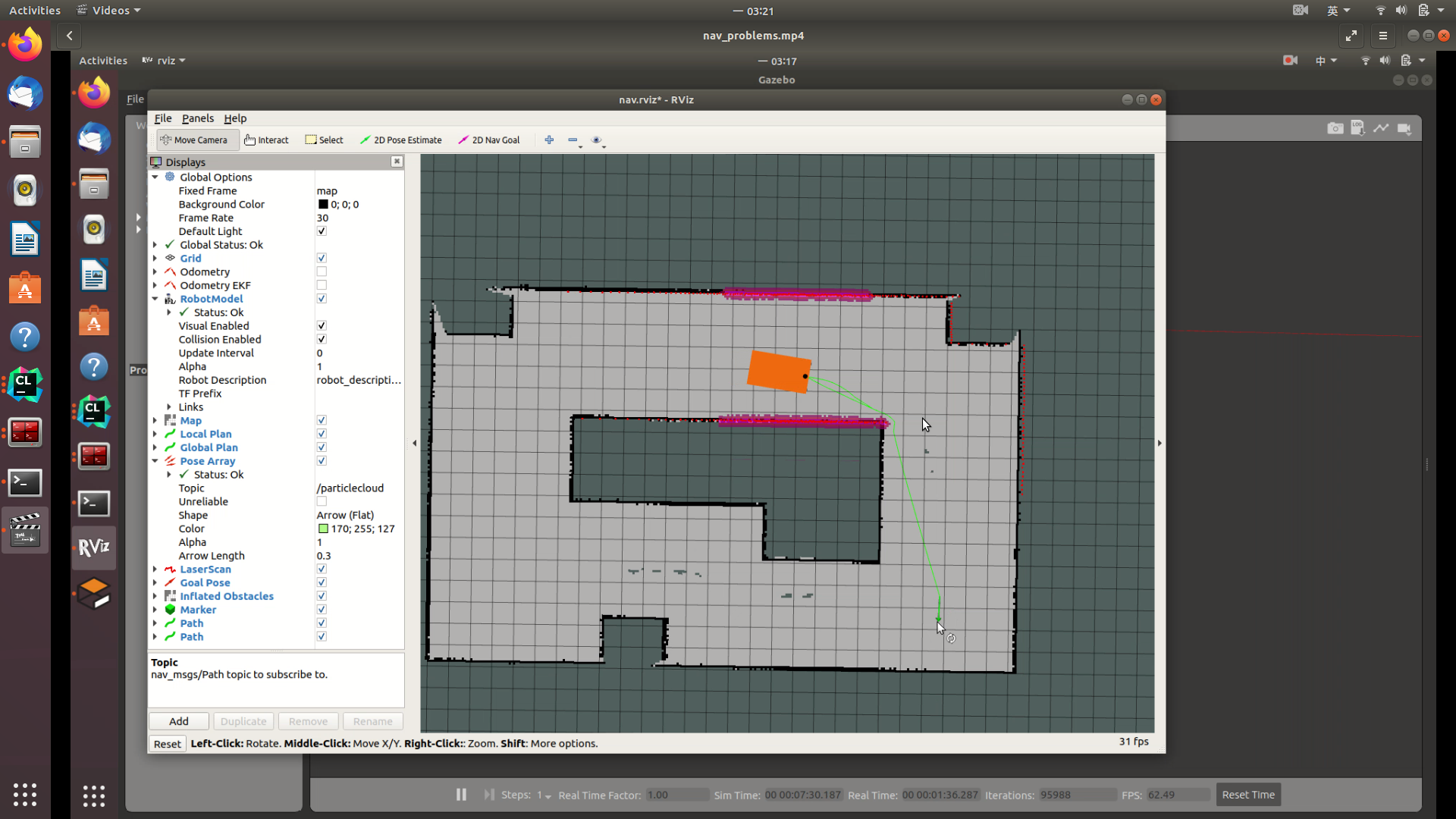


如上图所示,在gazebo仿真导航过程中遇到的情况,所以想向大佬们请教几个问题:
- gazebo中怎么控制小车的旋转中心的,在我仿真过程中,如果向右转是以右后轮为中心,向左转是以左后轮为中心。我想以后轮连线的中点为旋转中心需要怎么修改?是不是和urdf文件中的转动惯量矩阵设置有关?
- 从图中可以看到,小车导航的路径是以雷达目标生成的,我想以后轮的中心为基准生成导航路径,进行路径规划,需要怎么做?
- 图中我使用的是Dijkstra+TDB实现的仿真自主导航,想请教有什么方法或者设置可以避免上图中的小车撞墙和路径规划杂乱无章的情况么?



第三方账号登入
QQ 微博 微信