
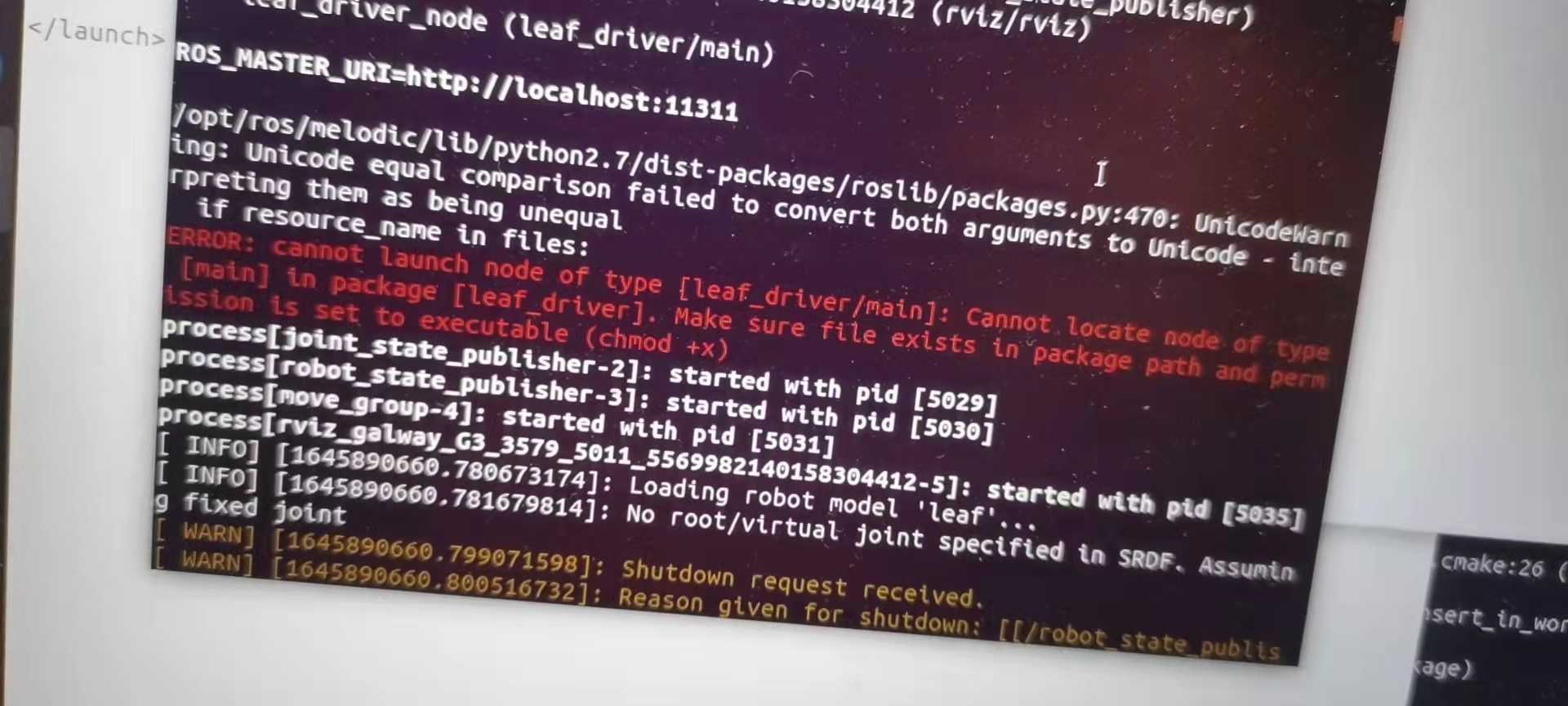
我是按照吴雪铭老师的smallrobotarm机械臂教程制作的机械臂,但是ros一直连不上机械臂,功能包都是用课程上面的功能包下载,然后按照上面的教程过,但是打开rviz会报错,说我动作服务器没连上,求大佬帮我看看怎么连上动作服务器,要排除launch配置里面的什么,还有就是我是用Ubuntu18.04版本的,不知道关不关事,谢谢了!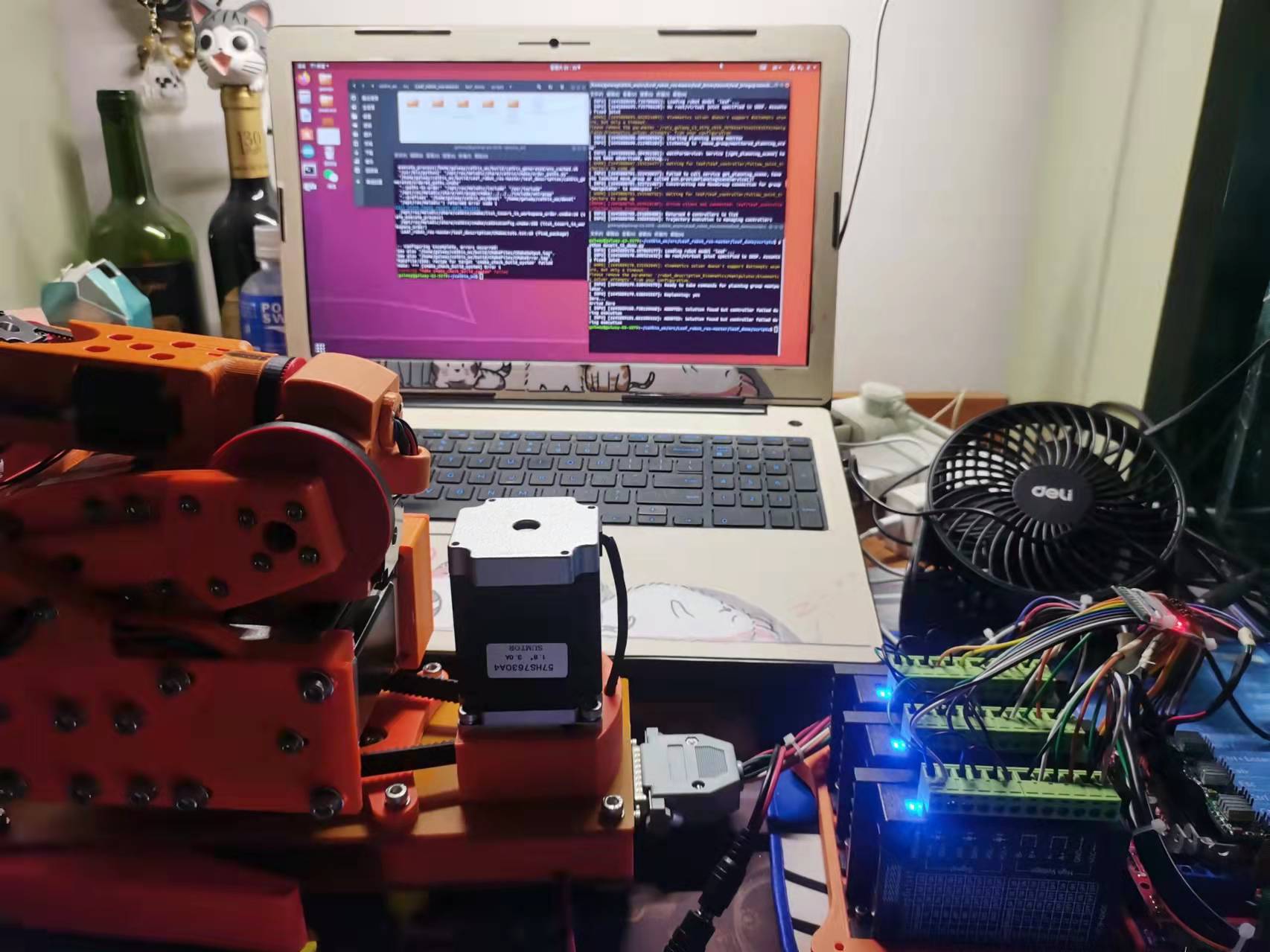

《新人求助大佬》我用ros rviz连接机械臂实物出现了问题,但是我一个人解决不了
评论(3)
您还未登录,请登录后发表或查看评论



我是按照吴雪铭老师的smallrobotarm机械臂教程制作的机械臂,但是ros一直连不上机械臂,功能包都是用课程上面的功能包下载,然后按照上面的教程过,但是打开rviz会报错,说我动作服务器没连上,求大佬帮我看看怎么连上动作服务器,要排除launch配置里面的什么,还有就是我是用Ubuntu18.04版本的,不知道关不关事,谢谢了!
您还未登录,请登录后发表或查看评论

第三方账号登入
QQ 微博 微信