PID算法详解 控制算法 所谓控制就是把当前所控制的对象的状态控制为我们设定的目标值,或者尽可能的接近,例如:一个温度控制系统中,我想控制水温在100摄氏度,100摄氏度就是目标值,我们需要把当前温度不断地接近目标值100摄氏度。 传统的控制算法 SV是我们设定的值,PV是对象当前的值,将SV和PV同时送入特定电路或者算法中,利用控制算法对SV和PV进行分析、判断、处理,从而得出一个输
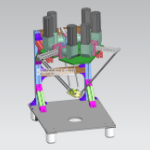
机械设计已经做好了,第一版做为原理验证,计划采用6个42步进电机直驱主动臂,不做减速机构。顶部的固定平台和主动臂用亚克力。电机的固定基座是异形件,用3D打印件,还有末端的小运动平台也是。黑色的从动臂是碳纤维杆。这样机械部分比较简(省)单(钱),缺点是运动范围非常小(鱼眼轴承偏转角度太小了),不过拿来搞原理验证也够了。对于三轴并联机器人,由于是3个主动臂驱动6个从动臂,也就是每个主动臂驱动2个从动臂
版本信息 软件 版本 QGC V3.4 Qt 5.11.0 Visual Studio 2015 软件架构 // main.cc内209行 QGCApplication* app = new QGCApplication(argc, argv, runUnitTests) QGCApplication在
1、欧拉插值 把旋转矩阵R表示成欧拉角,那么每个时刻的位姿就可以表示成三个角度,我们每两个节点之间对三个角度值分别进行插值,我们看起来就是每两个节点剑斗士绕三个轴依次旋转,每次旋转是按照其中一个角度值的插值,这也是他的缺点就是看起来比较繁琐,冗余的运动成分大,经济性很差 2、RPY插值 rpy插值和欧拉插值的原理在我心里是一样的 %% %欧拉插值和RPY插值 rpy0 = [0,0,0
0摘要 因为我个人是做六轴机械臂轨迹规划,所以大部分学习和博客重点与此有关。本篇文章主要讲述四元数的定义数学基础(没有推导只有公式结果)、四元数是如何表示旋转位姿,四元数表示位姿在轨迹规划过程中的插值方法、四元数的优缺点(主要是优点)。 1.四元数基础 1.1四元数作用从复数的定义是w = a+bj,我们发现其实给一个复数w1乘上另外一个复数w2,实际上可以实现对w1的旋转和缩放,如果我
文章参考书籍:《机器人学 建模、规划与控制》 0.摘要 本篇文章讲解微分运动学的主要内容,关键是两种雅克比矩阵的定义/计算,以及其对于正/逆运动学的作用,使用其求解机械臂奇异点的方法,文中还给出了六个转动关节的机械臂基于DH参数已知情况下的雅克比矩阵和奇异点。 1.几何雅克比矩阵 1.1定义:描述用户关节速度与相应末端执行器线速度和角速度之间关系的微分运动学 1.2具体计算公式:
1.他人博客经验分享 roslaunch ur_modern_driver ur10_bringup.launch limited:=true robot_ip:=IP_OF_THE_ROBOT [reverse_port:=REVERSE_PORT] (备注:IP_OF_THE_ROBOT需要替换成UR5机械臂本体的静态地址192.168.1.110) roslaunch ur_mod
为了方便进行无人机的编队演示,以及在各种场景下实现队形的灵活切换,开发了一套专门的上位机控制平台。本文将重点介绍应用于tello无人机的编队操作面板及其核心功能。 操作面板页面 下图展示了操作面板,其中包含5种编队动作和3个可选位置设定。用户可以根据实际需求选择动作,并对动作参数进行配置。该平台嵌入了两套通讯系统:仿真系统和物理系统。用户可以在仿真环境中验证动作的合理性和安全性,然后在物理系统中进
简介 直流无刷电机(Brushless Direct Current Motor,简称 BLDCM)顾名思义没有了直流有刷电机中的电刷和换向器等结构,因此线圈绕组不参与旋转,而是作为定子,永磁体作为转子,所以需要通过控制线圈电流方向来改变磁场方向从而使转子持续旋转,同步进电机不同的是,无刷电机绕组通常是 3 组,并且只有 3 个引出接线端子,一般为星形接法,3 组线圈的起始端通过电机内部连接到
直线插补针对的是走直线或者斜线轮廓形状轨迹,而在实际的数控机床上,不单单只有走斜线或直线,如果需要走的目标轮廓是弧线,直线插补满足不了,所以这时候就需要圆弧插补。 圆弧插补的简介 在圆弧起点与终点间,计算逼近实际圆弧的点群,控制刀具沿点运动,加工出圆弧曲线。它的思想与直线插补的类似,并且都是使用的逐点比较法来实现,所以插补步骤也一样都分为: 偏差判别 坐标进给 偏差计算 终点判别 逐点
从最基础的 IO口模拟脉冲控制步进电机旋转,到步进电机的梯形、S 型加减速以及 PID 速度环位置环控制等,这些都是控制单个步进电机的方法,在众多的步进电机应用中,更多的是双轴甚至多轴的联动控制。 插补运动 概念 插补这个概念最初源自于数值分析数学中的插值,它是一类在离散的已知数据点范围内构造新数据点的方法。现在这类方法被广泛应用在数控系统和各种相关行业中,所以接下来关于插补的 介绍
算法理论 有三条曲线分别是红色、青色和蓝色,其中红色速度曲线、蓝色加速度曲线,青色为梯形加减速模型的加速部分曲线。 图中是梯形加速度部分(青色曲线)和 S 形加速部分(红色曲线)比较,梯形加减速是按照一个固定的斜率增加速度到达 Vt, 到达 Vt 后加速部分结束,开始进入匀速部分,梯形加减速由匀加速上升的趋势突然变成匀速,由于惯性会产生较大的冲击力和噪声;S 形加减速则很好的避免了这一问题
梯形加减速算法与S 形加减速算法 梯形加减速算法其特点是:算法简便,占用时少、响应快、效率高,实现方便。但匀加速和匀减速阶段不符合步进电机速度变化规律,在变速和匀速转折点不能平滑过渡。启动、停止、高速运动段会产生较大的冲击和振动及噪音所以这种算法主要应用在对升降速过程要求不高的场合,如简单的定长送料。也就是说在一些精密的场合,梯形加减速算法并不适用。 S 形加减速算法:还是以梯形加减速章节提到
理论实现 由于算法在计算过程中涉及到一些浮点型运算,大量的浮点型运算会使得效率大大降低为了使在计算浮点型的速度得到更好的优化。 控制步进电机需要四个描述速度曲线的参数;速度曲线从零速度开始,加速到给定速度并持续到减速开始,并且最后减速至零给定步数的速度。 1.不同速度段的处理方法 通过第14篇文章思路大概已经清晰,接下来就是软件代码的设计,其实使用定时器产生脉冲,并按梯形规律加速即可,使用
之前有段时间因为机器狗项目的缘故,一直在使用小米微电机,但是苦于没有一个详尽的奶妈级教程,在控制电机的学习中踩了不少的坑。今天咱们就从头至尾一步一步的实现使用按键控制小米微电机。本文将会分析小米电机驱动库,并简要介绍相关的CAN通信知识。阅读本文之前建议先看一遍小米电机说明书,直接百度就有。 一、前置知识 小米微电机是一款伺服电机,那什么是伺服电机呢?伺服电机的最大特征要素是伺服机构。伺服机构
步进电机加减速使用的场景有那些呢?为什么要使用加减速呢? 硬件驱动细分器与软件的细分参数或定时器分频参数设置不当时启动电机时,会遇见步进电机有啸叫声但是不会转动,这是因为软件产生脉冲的频率大于步进电机的启动频率,步进电机有一个很重要的技术参数:空载启动频率,也就是在没有负载的情况下能够正常启动的最大脉冲频率,如果脉冲频率大于该值,步进电机则不能够正常启动,发生丢步或者堵转的情况。 或者也可以
控制器设计篇 前面介绍了利用matlab实现系统的模型辨识,本篇将在运动学模型的基础上,采用Matlab工具箱进行位置控制器的设计,并在仿真环境中进行了实验验证,所采用的控制器设计流程也适用于其他控制对象,简要设计流程如下 数据采集:本文旨在进行位置控制。在完成无人机速度环和姿态环的基础上,输入激励信号,以尽可能引发被控对象的特性。可以通过三角函数叠加的方式进行激励信号的输入。同时,确定期望速
模型辨识篇 在实际的无人机系统中,控制器的设计至关重要,它直接影响无人机的稳定性和响应能力。然而,要设计出高效、可靠的控制器,首先必须准确理解无人机的动态行为,这就需要通过收集输入输出数据来辨识其运动学模型。运动学模型是描述无人机在空间中运动规律的数学模型,它通常包含了无人机的位置、速度、加速度以及与之相关的控制输入等参数。通过辨识运动学模型,能够理解无人机在受到不同控制输入时的响应方式,这对
0. 简介 现在的机器人领域在普遍使用IMU(惯性导航单元)。该系统有三个加速度传感器与三个角速度传感器(陀螺)组成,加速度计用来感受飞机相对于地垂线的加速度分量,陀螺仪用来感知飞机的角速率变化;通过算法融合来计算出飞行器姿态,也用来进行航位推算。而每次我们拿到一个惯性导航的时候会发现参数手册中有很多信息,而这些信息的好坏要怎么评判是比较关键的。下面我们来一一讲解。 1. 最大零点偏移 1.1 含
上一篇介绍了Tello无人机仿真环境中的飞行控制,本篇将介绍tello无人机在物理系统中的轨迹跟踪,实现实物无人机的速度控制。本文采用的无人机为Tello TT,TELLO Talent由飞行器和拓展配件两部分组成。飞行器配备视觉定位系统,并集成飞控系统,能稳定悬停、飞行。可显示高清画面,并可实现拍照、录影、弹跳、全向翻滚以及一键飞行等功能。Tello相机可拍摄500万像素照片与720ρ高清视频
第三方账号登入
看不清?点击更换



















第三方账号登入
QQ 微博 微信