
项目描述
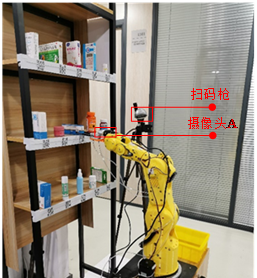
本文设计了一种货架拣选系统,用于目标识别、姿态估计、物品摆放,特别是拣选路径规划。文中描述了本系统中的视觉感知模块,提出了一种结合2-优化局部搜索算法的遗传算法,用于在旅行过程中进行拣选优化
硬件和材料列表
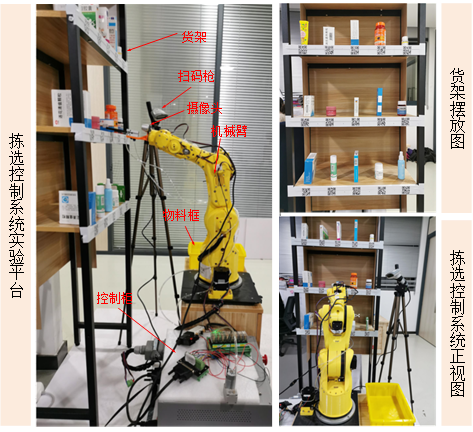
PROBOT_Anno机械臂x 1
Intel D435相机x 1
货架x 1
物料框x 1
扫码枪x 1
夹爪x 1
USB 3.0线缆(1.5米)x 1
以太网网线(1.5米)x 1
工作台 x 1
电脑 x 1
大小合适的物品x12
开发环境
安装部署过程展示

安全事项
需要人机防护安装
参考文献
[1] K.-T.Yu,N.FazeliandN.C.Dafle,A summary of team mit’s approach to the amazon picking challenge 2015,arXiv:1604.03639,2016.
[2]Official websiteof amazon picking challenge.[Online].
Available:http:// amazon picking challenge.org.
[3]H.Zhangetal.,DoraPicker:An autonomous picking system for general objects, Intl.Conf.on Automation Science and Engineering(CASE),2016:721-726.
[4]A.Zeng,K.-T.Yu,S.Song,D.Suo,E.WalkerJr,A.Rodriguez,andJ.Xiao,Multi-viewself-superviseddeep learning for 6d pose estimation in the amazon picking challenge,in
2017IEEE International Conferenceon Robotics and Automation(ICRA),2017.
[5]C.Eppneretal.,Lessons from the Amazon picking challenge:
Four aspects of building robotic systems,inProc.Robot.,Sci.Syst.,2016.
[6]J.Scholz,Genetic Algorithms and the Traveling Salesman
Problem a historical Review,arXiv:1901.05737,2019.
[7]D.Whitley,Agenetic algorithm tutorial.Statistics and Computing,1994.
[8]X.W.Wang,Y.X.Yan,X.S.Gu,Welding robot path planning based on Levy-PSO,Controland
招募





评论(1)
您还未登录,请登录后发表或查看评论