

这好像是第一次公开的PX4开发者会议,由PX4的创始人主持会议(与会者基本都是欧洲人),议题主要涉及PX4的一些最新进展,视频地址:
排除我不太感兴趣的还有听不懂的UAVCAN等话题,下面记录一些梗概:
1.PX4的使用者不应该试着重建一套飞控系统,而是应该在PX4的基础上、根据应用场景尝试各种定制化的功能,这些功能应该是运行在companion computers上的;随着这些功能的反哺,PX4会逐渐进化,进而用户们在此基础之上再搞出新名堂来。
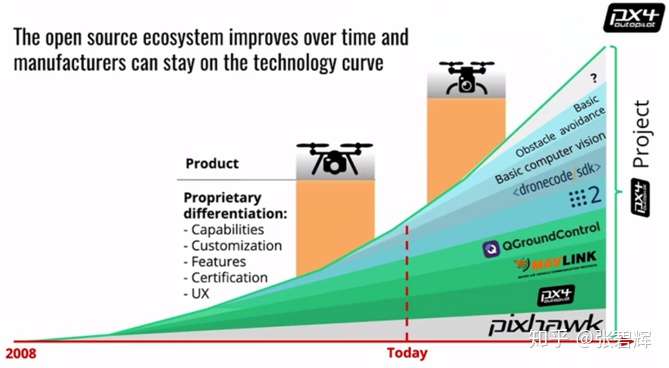
2.今天的无人机产业可以类比为百年之前的汽车产业:行业标准推动了产业流水线化,进而业内的企业逐渐合并淘汰,产业整体趋于成熟。未来无人机的行业标准,应该来自于开源社区。
3. PX4推出了px4_ros_com模块以及相应的FastRTPS/microRTPS协议,它可以通过UART或UDP直接连接飞控与companion computer上的RTPS/DDS系统,例如ROS2(不能直接支持ROS1),无需MAVROS。

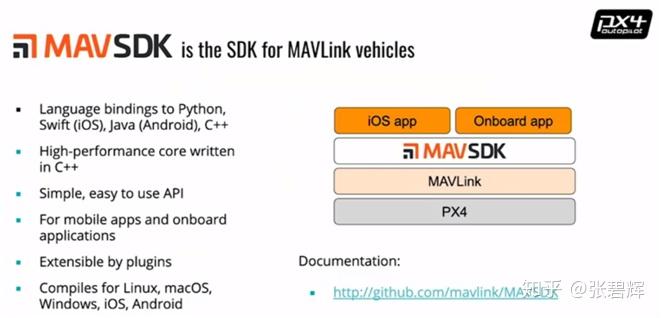
4.介绍了MAVLink的多语言、多平台API函数库MAVSDK:
5.在PX4/ROS2协同仿真中,可以从USGS发布的DEM模型构建三维地形环境:
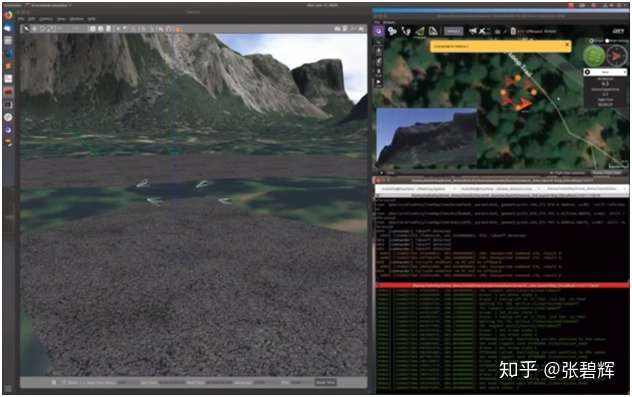
Open Robotics的演讲者还展示了城市、地下隧道等精细的gazebo环境模型,但是不知道在哪下载…
6.计算机视觉
目前学术界在做、但是还不能产品化的事情:
a.SLAM
b.复杂环境着陆安全性分析
c.目标识别
d.RTL(严格的原路返回,GPS denied)
e.从飞行记录仪中学习安全飞行
f.动态平台精准着陆/着舰
g.其他更多
计算机视觉还没普及的重要原因是算力的限制,处理器太重、功耗太大、太贵(包括Intel、Nvidia、FPGA、其他ARM等)。新一代的硬件正在研制中。
(从PX4角度看)需要努力的方向:
硬件方面:FCU与companion computer之间的高速通信,价格适合大规模应用,容易买到;
软件方面:可靠的PX4与ROS通信,PX4集成视觉相关接口(比如ObstacleAvoidance模块),FCU与companion computer的分工。
7.视觉控制接口(ObstacleAvoidance)
目前大多数视觉控制架构如下:
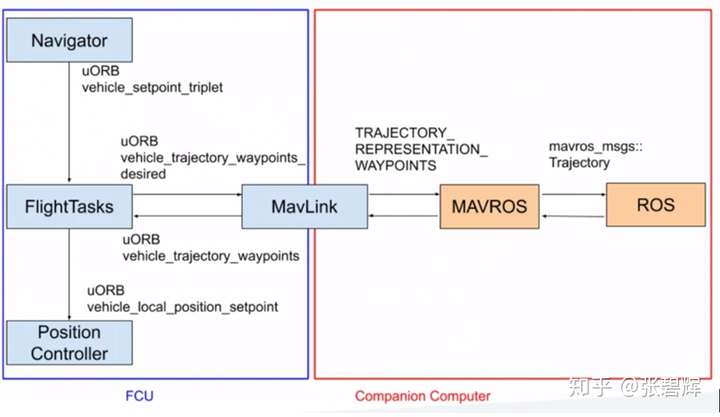
PX4的ObstacleAvoidance模块位置如下:
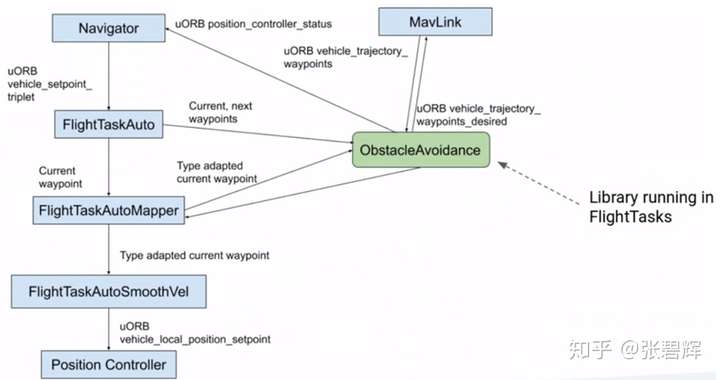
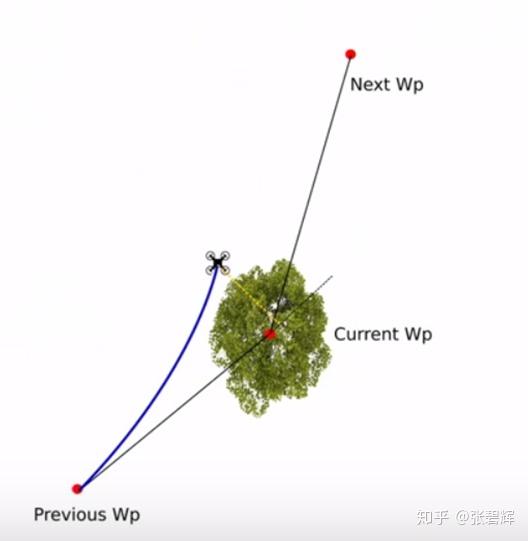
在原定waypoints的基础上,根据视觉传感器的信息修正航迹:
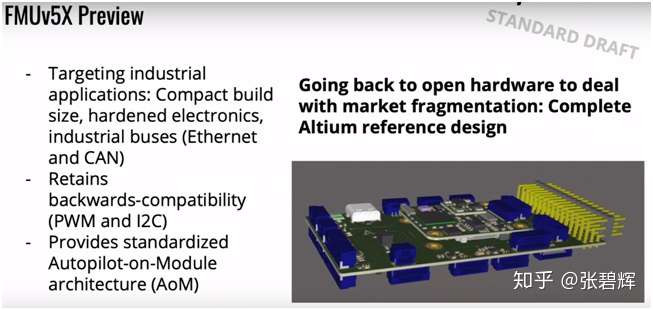
8.Pixhawk新版标准硬件计划:分为IMU、Autopilot、Base三块电路板;提供一种“无人机CV”标准平台。
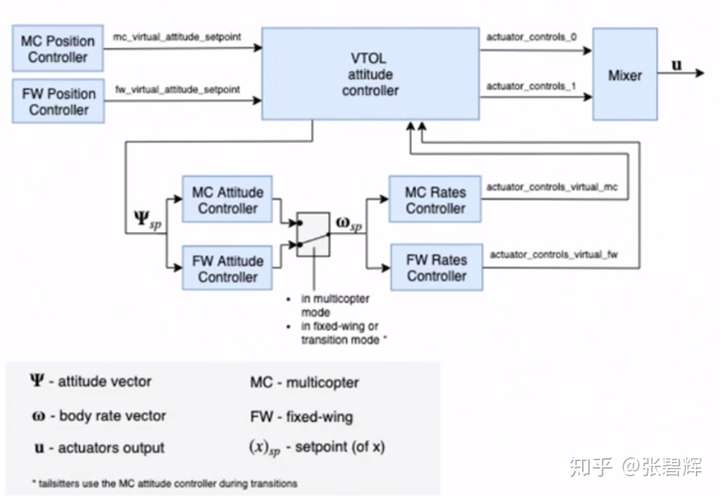
9.VTOL
现有控制架构在飞行模式转换过程中会出现Roll-Yaw耦合,未来会让Mixer根据飞机状态承担Control Allocation功能,飞控独立于飞机的飞行模式。



评论(0)
您还未登录,请登录后发表或查看评论