

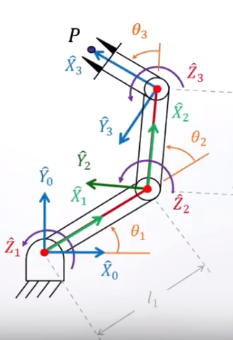
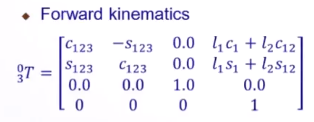
Example 1: A RRR Manipulator
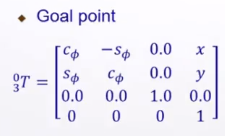
Ik(Inverse Kinematics) problem: given ,
现在我们已知:
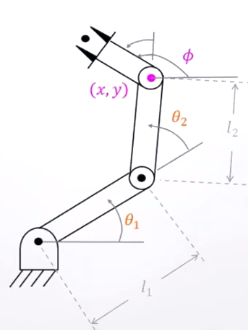
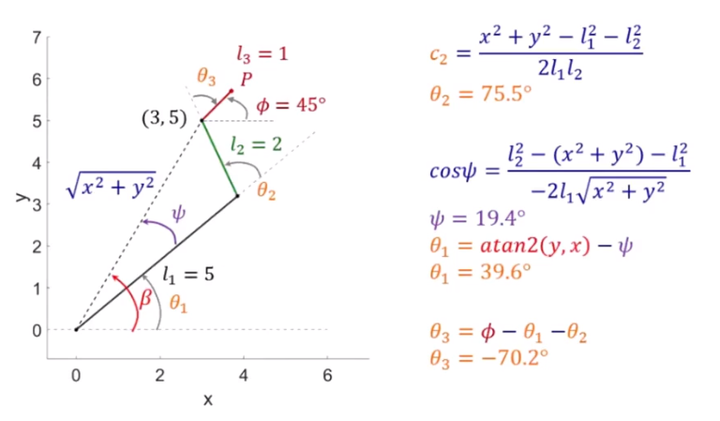
- 求解方法一:几何法,将空间几何切割成平面几何:
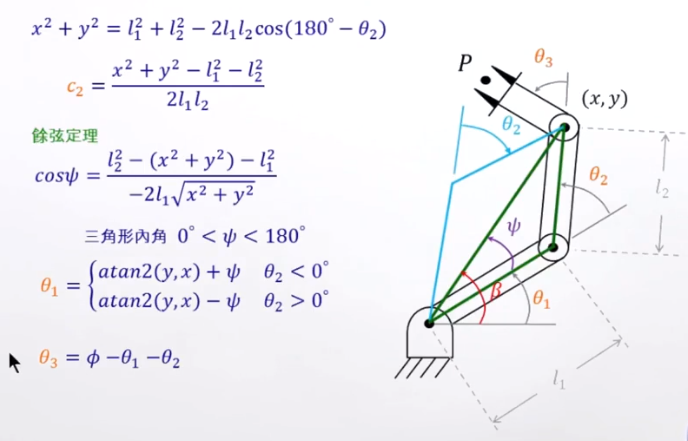
根据余弦定理可以轻松求得;
有两种情况,已在图中标出;有了
与末端角度
可以很轻松求出
。
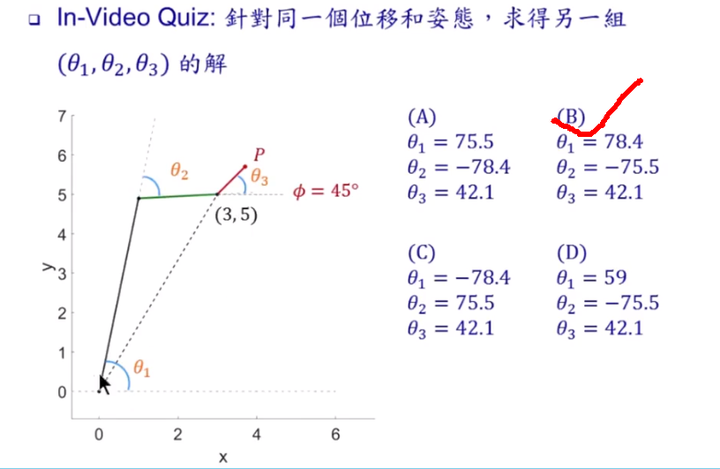
2.针对同一个例题,根据代数解法进行求解
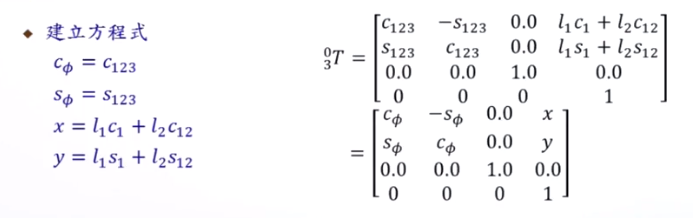
- 解
- 注意:若右边一堆算出来的解>1或<-1,说明现在已知的这个末端位姿是无法到达的(Too far for the manipulator to reach)
- 若:右边一堆算出来的解∈[-1,1],则由两个解:
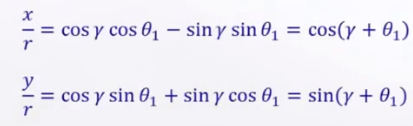
- 接着将求得的

可以发现,这里的求解技巧首先是: ,然后将
的系数设为
。
- 接着做变数变换:
- define :
- then:
- 带入上式:
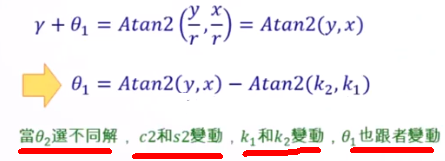
左侧已知,右侧 已知,所以Next Step:
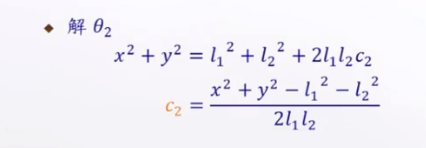
- 解
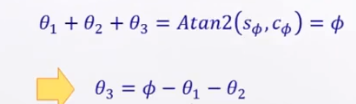
- 最后解
(小tip) ---- 三角函数方程式求解:
Ex: 如何求得 中的
???
- 变换:变换到多项式空间(polynomials),4阶以下均有解析解

- 于是有:
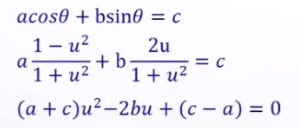
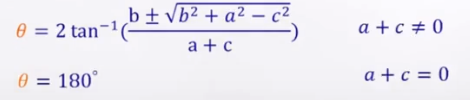
- 所以公式解:

- 所以推出
:


评论(0)
您还未登录,请登录后发表或查看评论