
1. 李群和流形
首先,要明白李群和李代数是一种数学抽象概念,如同集合等概念一样,而并不就是机器人位姿这样具体的概念。而能够代表机器人位姿的SE(3)或SO(3)等就是具体的李群元素,如同自然数、负数等集合的具象化一样。
而某个李群G,定义为一个光滑的流形(manifold),由一个集合G和定义在该集合上的一个操作 组成,具体的定义就不再赘述了。
而流形可以理解为一个光滑、曲面和非线性的高维空间。而光滑这个定义就说明了对于流形上的每个点,都有一个唯一的切平面(tangent space)。这个切平面与李代数相关,而且是一个向量空间,这就为后续我们做微分铺平了道路。
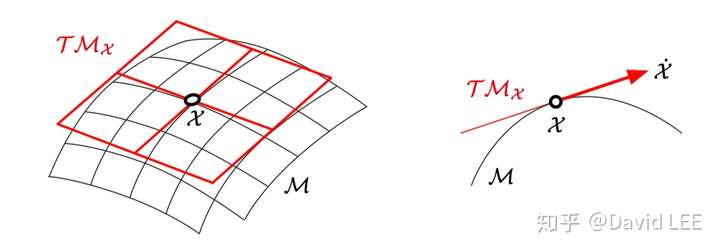
对一个李群而言,该李群所在的流形在每一点上都一样。对应地,任意点上的切空间也就都类似了。而群的定义(及其数学操作上的性质),使得对于该流形上的元素进行操作后的结果仍然落在这个流形上。根据定义,群中的一个特殊元素即为幺元。对应地,幺元对应的切空间也是比较特殊的,该向量空间就是这个李群所对应的李代数。
1.2 李群的操作与举例
李群具有“变换“其他集合中的元素的能力,如机器人学中讨论的SO(n), SE(n)和相似变换群Sim(n)。利用数学语言来表示,假设有李群M和一个集合V,用 来表示这种转换能力(注意与李群自身的操作
区分),即有
这样的能力也是其应用在状态估计领域的基础。
而这样的变换满足结合律:
对于常见的几个李群,这样的操作具体为
1.2.1 举例
单位负数 是一个最简单的李群
。其幺元为1,逆即为该负数的共轭,群上的操作为乘法。
其所对应的操作为与一个向量 相乘,表示将这个向量旋转
角,得到另一个向量
。
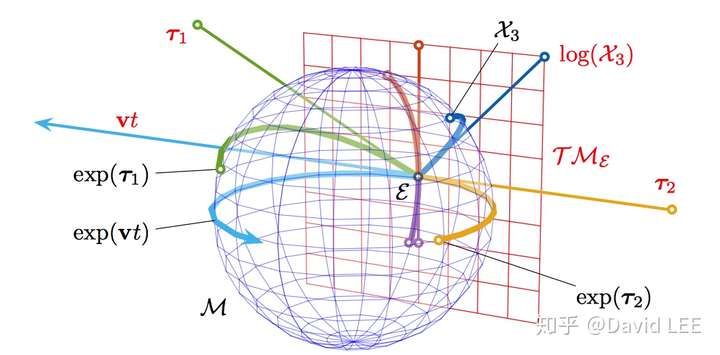
对应的流形即为一个定义在负平面上的单位圆。从下图也可以看出,它的李代数为对应的负数轴 。而指数映射就是熟悉的欧拉公式
,对数映射即为
。而从图中也可以看出,指数/对数映射是一个满射。
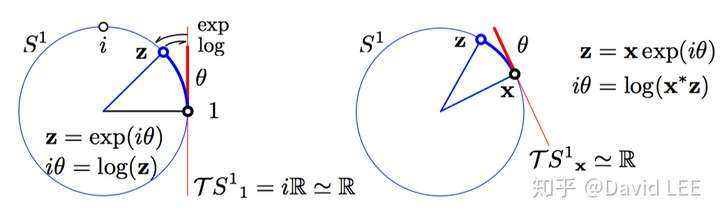
可以注意到,除了幺元的切空间(李代数) 外,李群中的其他元素也有切平面
,两者之间是存在一个转换关系的。
2. 切空间,李代数和向量空间
2.1 从切空间到李代数
前面提到,流形上的每一点都存在切空间,而且他们也都是类似的。但特殊的一个是幺元处的切空间,它是这个李群所对应的李代数。这是为什么呢?我们做个直观的解释。
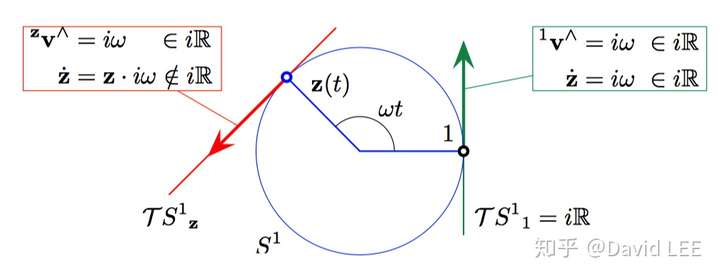
用单位负数这个李群来说明。假设其上有一个点z按照恒定角速度 在旋转,该点可以表示为
,它经过了两个点:幺元1还有点z。
当它经过点z的时候,其速度(某个点的速度在对应点的切空间上,因此也是该点切空间的表示) 在全局坐标系 (global frame) 下可以表示为
;但在其切空间的局部坐标系 (local frame) 下,其速度表示为
。二者间的关系为
.
但在幺元处,二者的表示是统一的: 。由上一小节的举例中我们也可以知道,
的切空间的结构都为iR,这也是
的李代数的结构。这和幺元处的速度
的结构是相同的,也说明了幺元处的切空间即为对应李群的李代数。
2.2 李代数
将李群的幺元表示为 ,把切空间表示为
,这个李群M对应的李代数m即可表示为
有如下几个性质:
- 李代数m是一个向量空间,其维度与对应的李群的自由度相同;
- 李代数和李群间的转换是通过指数\对数映射完成的;
- 李群中其他元素X的切空间上的向量可以转换到幺元
的切空间上,该转换是个线性变换,称为伴随。
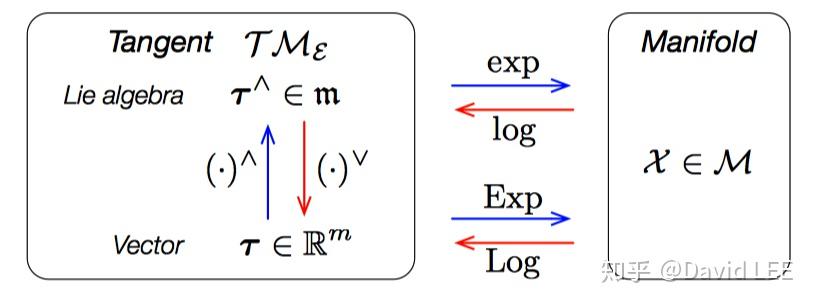
由李代数的定义可以知道,李代数由一个向量空间和一个运算符(李括号)组成,并伴有一些性质。不引入其他符号,李代数m可以表示为 ,其中
为对应的向量,而
则是该向量及其对应的李代数之间的转换。例如对于SO(3),
代表了三个旋转角,而
,
在这里等价于取反对称矩阵的操作。而对应的逆操作为
要注意到A才是李代数,而是李代数所在的向量空间。这点很重要,因为其实我们更加关心的是这个向量空间而不是李代数。只有使用了向量,我们才能进行各种线性代数的操作,或者把好几个向量堆叠成一个矩阵。
此外,对于SO(3)来说, 是对向量取反对称矩阵的操作,但对于其他李群却不是这样的,例如我们熟悉的SE(3)就不是。而对单位负数
而言,
;对于单位四元数而言,
。为了区分,使用
表示对向量t取反对称矩阵。
2.3 指数/对数映射
从上图可以直接看到,指数/对数映射是李群和李代数之间的一个精确映射。 下面可以进行一下推导。
对李群的自反性 这个等式对时间求导,就可以得到
。回顾第一节举例中国呢点z(t)经过点z时,两种坐标系下速度的表示关系,就会发现这个式子正好是李代数的表示:
如果李群为SO(3),那么这就是泊松公式。
继续推导,有 。这是个微分方程,解之可得:
由于X(t)和X(0)都是李群中的元素,那么 显然也是李群中的元素。因此,指数映射完成了从李代数到对应李群的映射。
对于指数映射,有如下几个等式:
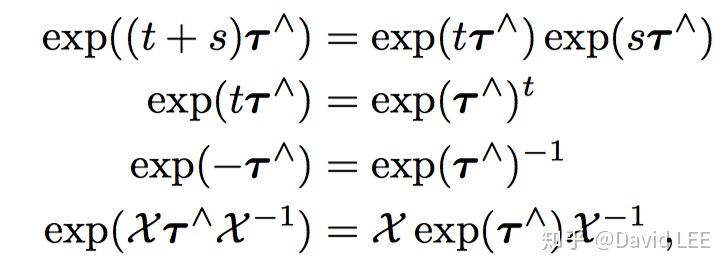
如前所述,其实我们更想在李代数关联的那个向量空间(而不是李代数本身)上进行操作,因此,定义大写的指数/对数映射:
2.4 左右操作符
既然流形上的任意一点都存在切空间,因此,将幺元上的切空间的向量表示为 ,表示的是全局坐标系(global frame);而其他元素的切空间表示为
,表示的是局部坐标系(local frame)。
为了更好地表达流形上的增量,方便后续我们引入微小量进行求导等操作,引入左右加减法。
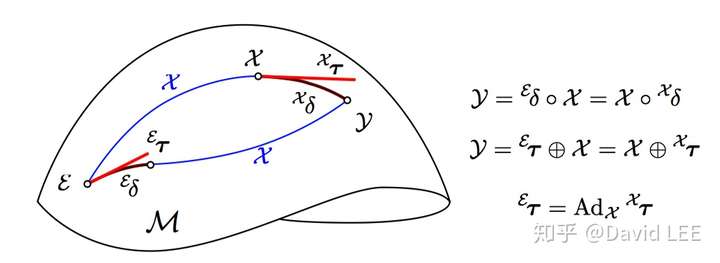
从上图可以看到,这两种表达方式都是一样的,只不过是在不同坐标系下进行操作。
需要注意的是,的结果是落在向量空间的。而
的一个操作数
3. 伴随
之前文章中讲到了SE(3)的伴随,但对它的作用没有进行更多地介绍。这里我们再次重温下它,并且会在后面和左右操作符一起经常用到它。
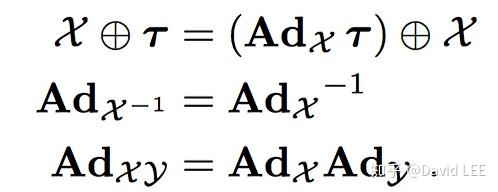
通过上一小节左右加法的两个等式,我们就有 。显然,这是全局坐标系(幺元处的切空间)和局部坐标系(其他元素的切空间)之间的一个转换关系。
于是有
由此,对于李群M上的一个元素X,可以定义它的伴随 :
所以, 表示了全局坐标系和局部坐标系之间的转换。并且,伴随还具有如下两个性质:
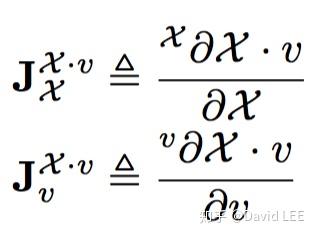
3.1 向量空间上的伴随
前面说过,我们更希望在向量空间上操作,为此还定义了Exp/Log映射,考虑到伴随操作也是线性的,因此,我们也定义一个矩阵伴随 ,用于操作和李代数相关联的向量空间:
对于矩阵伴随操作,也有如下性质:
3.2 举例
对于SE(3),我们有

根据伴随的定义,我们有
因此, 。翻看前面的文章,可以发现,这和之前定义的相同。
4. 关于李群的导数
前面已经把整个李群和李代数的框架和概念讲清楚了。对于李群和李代数,我们最关心的是它们的各种导数。因为这涉及到非线性优化时的雅可比矩阵推导。现在,万事俱备,就让我们来看看李群上的各种导数。
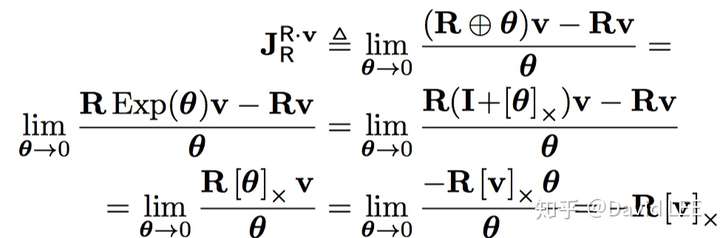
4.1 左右雅可比矩阵
通过前面的定义,再配上之前定义的右 操作,很自然就可以计算李群的右雅可比矩阵:
注意到Log操作符,在流形元素 和
上的变化就被映射到了局部坐标系的向量空间上。因此,我们得到的是一个正确的雅可比矩阵
,完成两个切空间之间的线性映射:
。
举例而言,对于SO(3),有方程 来旋转一个空间三维点,代入到上面的公式就有:
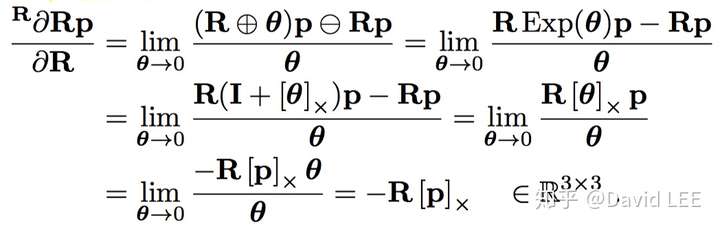
需要注意的是,中操作的,因此我们中直接只用了向量空间中的减号)。
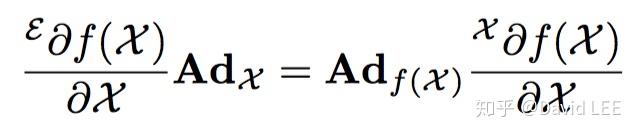
同样地,如果我们在全局坐标系之下,使用左 操作,就可以得懂李群的左雅可比矩阵:
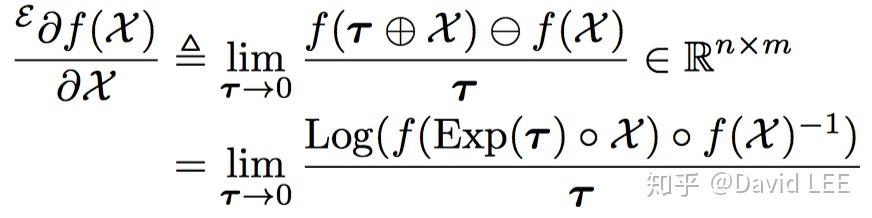
与右雅可比矩阵相比,左雅可比矩阵完成的是两个全局坐标系之间的映射: ,亦即流形M和N的李代数。
最后,左右雅可比矩阵可以通过M和N的伴随联系起来:
后面,我们默认使用右雅可比矩阵。
这里直观地展示下流形上的雅可比矩阵。
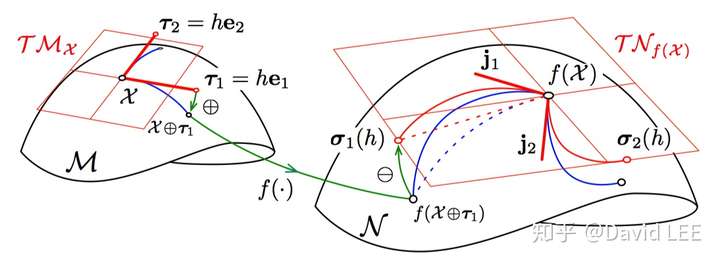
将流形M上的元素X的切平面上的扰动 分解到主方向上,得到
。然后,经过
,f()和
就得到了流形N上的元素f(X)的切平面上的扰动
。
对于流形M来说,切空间上的扰动 (TM上的红色粗直线)经过Exp映射(
是包含了一个Exp映射的),得到流形M上的扰动(M上的蓝色曲线)。而经f映射后,由于f的非线性,得到的流形N上的扰动
(N上的蓝色实线)并不真正落在流形N上(N上的蓝色虚线才是“真的扰动”)。但这个“假”扰动的Log映射结果
(TN上的红色细曲线)和“真”扰动的Log映射结果是一样的。而
的切线j即为方向导数。将之组合起来,就得到了了雅可比矩阵
,完成了
中的向量到
中的向量的映射。
4.1.1 局部坐标系的作用
对于公式 是针对恒定速度v的。假如v是不断变化的,那么我们倾向于将一段时间t分解成更多段时间
,每小段时间内速度都是恒定的。这样一来就可以有:
如下图所示
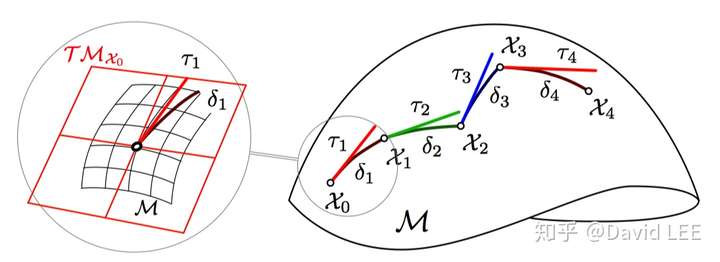
注意到,每一小步 都是落在李群元素
的切空间上,即局部坐标系上,映射在流形上一小步
。因此,我们使用右雅可比矩阵和右操作符:

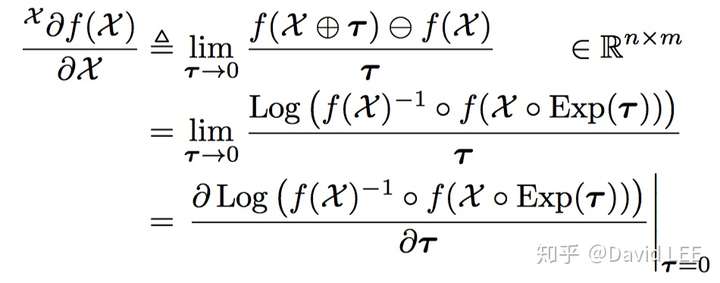
4.2 更多情况下李群的导数
假设某个函数f(X)是的自变量是一个流形,我们可以研究下各种常见f下李群的导数。
假设Z=g(Y)=g(f(X)), X, Y, Z都是流形。那么针对X上的一个扰动 在不同情况下对Z的影响有:

4.2.2 逆
定义 ,根据之前的公式就有:
4.2.3 结合
其中,对于第一个式子的推导如下
4.2.4 李群的雅可比
结合前面几讲,可以定义李群自身的左右雅可比矩阵:
右雅可比矩阵将向量 上的扰动映射到对应的流形的局部坐标系
上;而左雅可比矩阵将向量
上的扰动映射到对应的流形的全局坐标系或李代数上。
针对左右雅可比,有我们熟悉的BCH近似公式:
- 右雅可比:
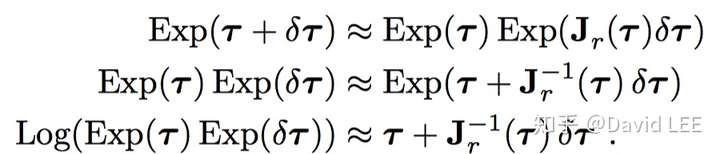
- 左雅可比
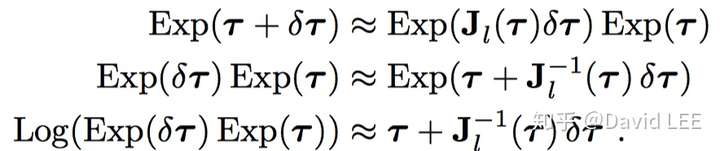
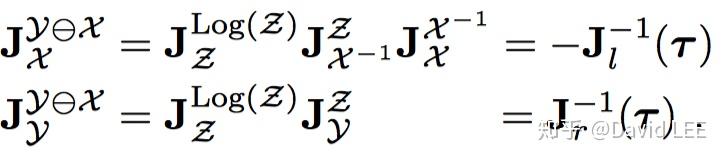
利用上两组公式中 的等价性,我们还可以得到
我们也可以利用链式法则
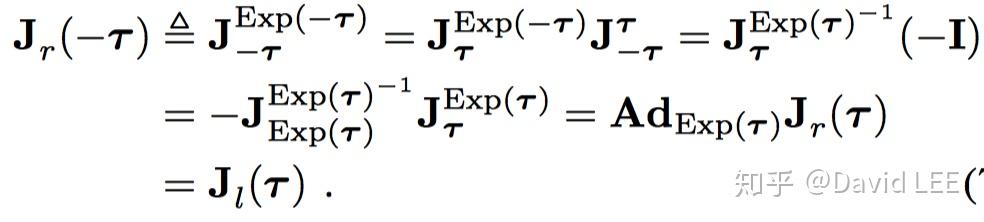
得到左右雅可比之间的关系。
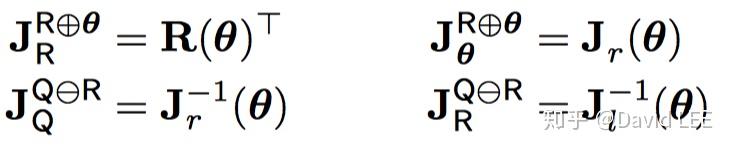
4.2.5 群的操作
对于 和
,我们有
这两个操作涉及到具体的李群,因此在后面的举例中再给出。
4.2.6 Lop映射
对于 , 有
4.2.7 加减操作
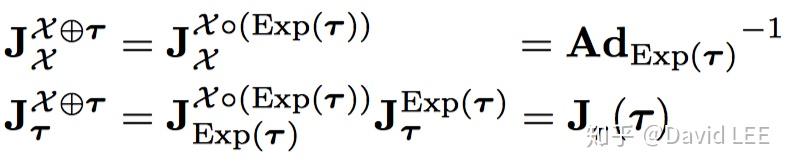
这其实和4.2.3 结合很相似。
而对于 有
对于第一个式子的推导为
4.3 举例
下面,我们以单位四元数 和SO(3)群为例,来具体看上面这些公式的实例化。
这里,单位四元数为 ,旋转表示为
, u为旋转轴,
为旋转角。
4.3.1 指数/对数映射
对于四元数,有

对于旋转矩阵,有
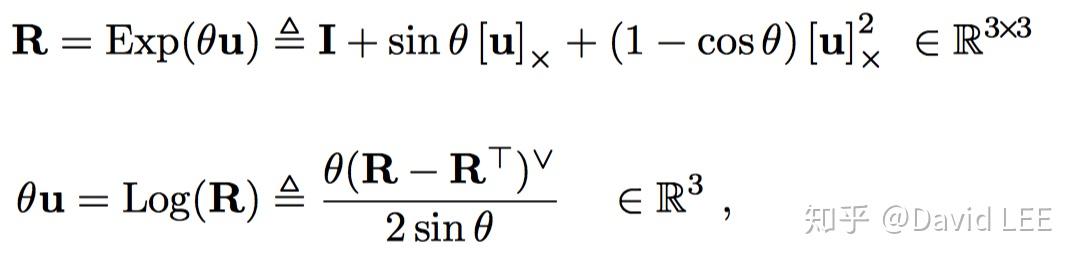
其中,
4.3.2 李群的操作
二者都是用来旋转空间中的三维点。对于单位四元数有
而对于SO(3),有
对于二者之间的联系有

4.3.3 各种导数
对于单位四元数和SO(3)而言,其切向量空间是同质的, ,因此各种导数对二者来说是一样的,所以这里统一说明。
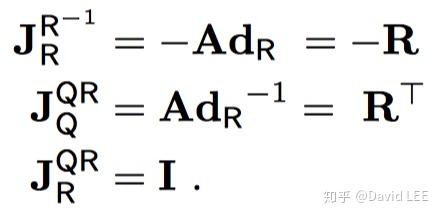
- 伴随

因此有
因此有 .
如果我们还记得这个公式 ,就可以得到
这个公式在[李群和李代数(三):优化基础中讲SO(3)的雅可比矩阵中提到过。是前述通用公式在SO(3)上的实例化。
- 逆与结合
- 左右雅可比矩阵
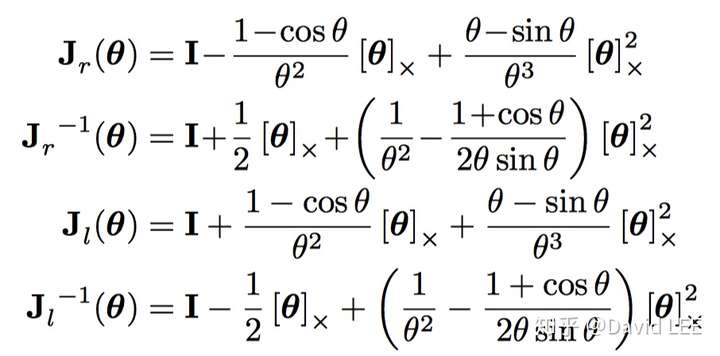
对应的,有
- 右加减操作
假设 ,则有
- 群的操作

参考文献:
[1] A micro Lie theory for state estimation in robotics.
[2] 《state estimation for robotics》


评论(0)
您还未登录,请登录后发表或查看评论