

上篇博文简要介绍了卡尔曼滤波器的思想,这篇博文详细推导一下卡尔曼滤波器,确保大家能够看懂所有细节,看完后记得自己推一遍加深印象!
状态空间方程
假设一个确定性离散时间系统可以用如下状态空间方程描述:
下标代表采样时刻,即 时刻的状态由
时刻的状态和输入决定。
然而真实系统往往没有那么美好,Uncertainty is everywhere!引入过程噪声(或者扰动 )以及测量噪声
,则上面状态空间方程表示为
那么我们该如何估计出真实的状态 呢?
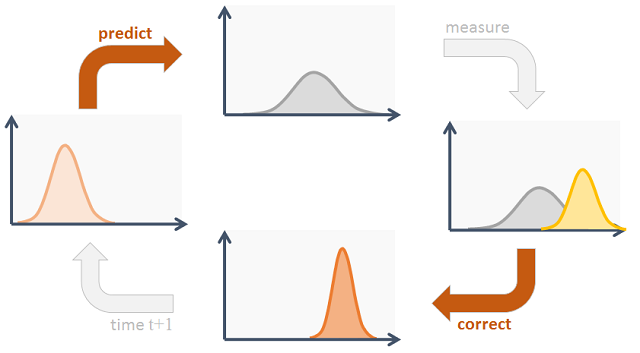
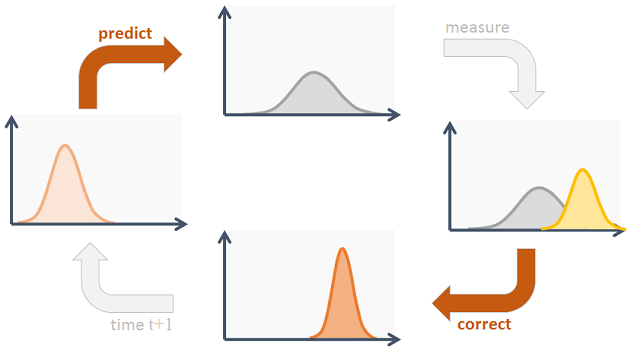
数据融合
在每个采样时刻,我们能够得到输出的测量值 ,因此一种对状态的估计就是用测量值(measurement)反算出来(但是肯定不太准)
另一种对状态的估计则是利用上一次的估计结果(calculation)递推(也是不太准)
回顾上一次提到的数据融合的思想(递归思想),对于状态的估计其实就是
即
为了避免求逆,我们可以对上式进一步转化(令 )
因此卡尔曼滤波器要求的其实就是系数 。
卡尔曼增益推导
从问题出发,我们要估计的是什么?是状态变量,那自然是希望估计值 和真实值
越接近越好!那么我们来衡量一下估计值和真实值之间的差距(
):
上式的推导就只是代入状态空间方程后合并同类项。
进一步我们假设这个误差也是个正态分布
因为我们希望估计值和真实值的误差越小越好,也就是说我们希望误差满足的这个正态分布的方差越小越好,也就转化成了误差的协方差矩阵的迹最小
因此我们需要将协方差矩阵表达式推导出来
代入 ,
把转置放进去
把两个括号的乘积展开成四项,同时引入估计误差
对每一项进行求期望的操作(因为是线性加减)
注意:常数求期望相当于系数;两个独立变量乘积的期望等于期望的乘积。
因此
同理
所以协方差矩阵剩下两项
将估计误差的协方差矩阵记做 ,上式转化为
展开括号
到现在我们已经推导出协方差矩阵的表达式了,我们要求协方差矩阵的迹最小,这是一个最小化的问题,很直接的做法就是求导令导数为 。即
引入两个个求导的公式
可以得到协方差矩阵的迹的导数为
到这里卡尔曼增益就求出来了!
再回到递推公式
当 特别大的时候,卡尔曼增益趋于零,也就是去相信
;当
特别小的时候,卡尔曼增益就是
,即
。再次验证了数据融合的思想。




评论(0)
您还未登录,请登录后发表或查看评论