

一、简化的惯导算法
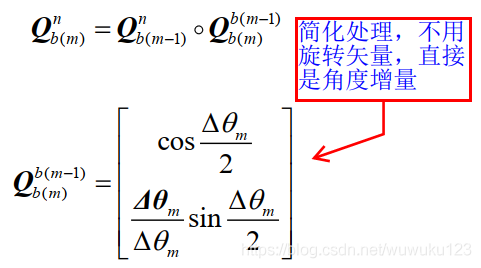
1、姿态更新
陀螺仪输出直接进行积分,得到角增量;
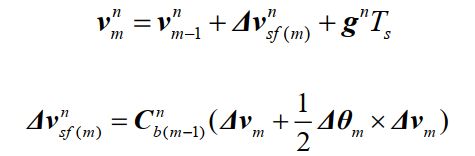
2、速度更新:
在导航系下,完整的速度微分方程,如下:

其中,在地速V<100m/s时,第二项量级大约为1mg;小于传感器本身的误差;因此,忽略地球自转和导航系在地球表面旋转的影响,得到如下更新方程:

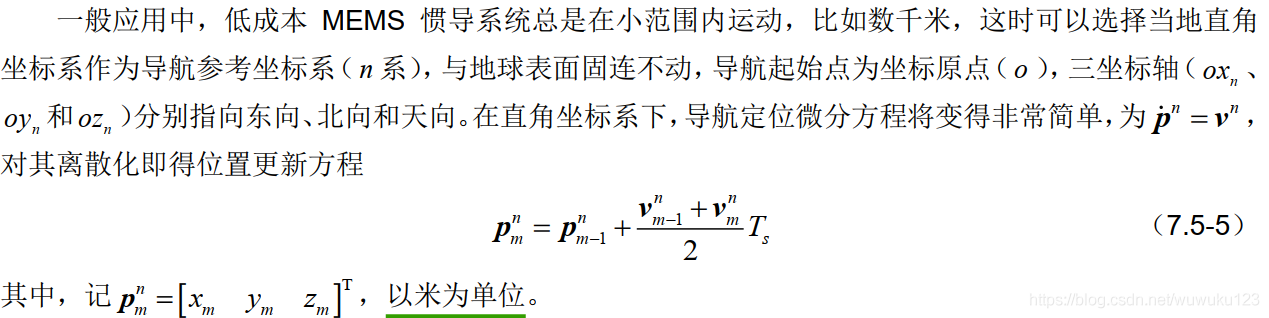
3、位置更新:
二、低精度惯导系统误差方程
1、姿态误差方程:
![]()
其中,括号中第一项为陀螺仪的一阶马尔可夫过程误差:括号中第二项为陀螺仪角速率白噪声。
其中τGi为相关时间常数,WrGi是一阶马尔可夫过程激励白噪声。
误差方程详细解释:捷联惯导基础知识解析之二(捷联惯导更新算法和误差方程)
噪声详细解释点击:捷联惯导基础知识解析之三(噪声和kalman滤波)
2、速度误差方程:
![]()
其中,括号中第一项为加速度计的一阶马尔可夫过程误差:括号中第二项为加速度计比力的白噪声。

其中τAi为相关时间常数,WrAi是一阶马尔可夫过程激励白噪声。
综上,可以看出陀螺仪和加速度计噪声均采用一阶马尔可夫过程;其优点如下:

Allan方差噪声系数,主要有用的是角度随机游走系数(用于设置Q阵)和零偏不稳定性系数(用于设置一阶马氏过程的方差)
参考链接:Allan方差分析的使用要点
3、位置误差方程:
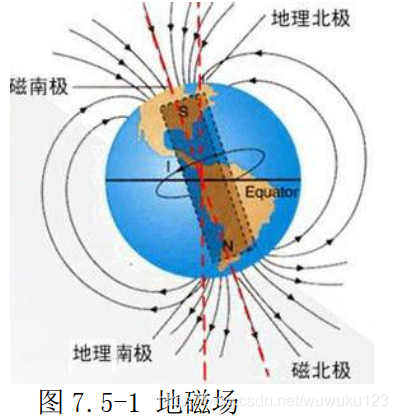
二、地磁场测量及误差方程
1、地磁场描述:

2、磁场坐标系/磁强计敏感轴坐标系
(1)磁场坐标系(OXYZm,简称m系):oym指向磁场方向;oxm在水平面内(此时,X轴指向不确定是哪里);ozm与前两者构成右手直角坐标系;如下所示:
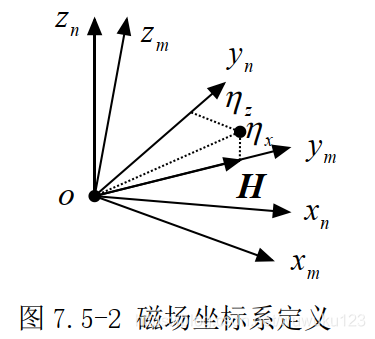

因此,从导航坐标系(n系)到磁场坐标系的变换矩阵为:

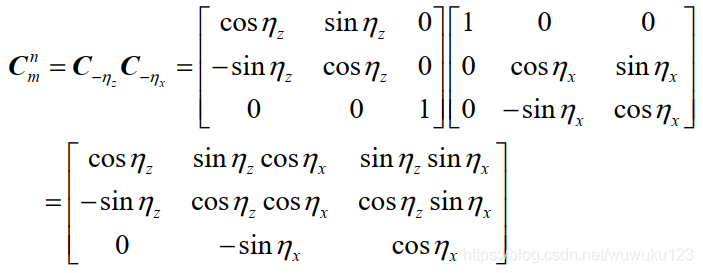
实际中,计算磁场坐标系为m',则m系和m‘系的变换矩阵为:



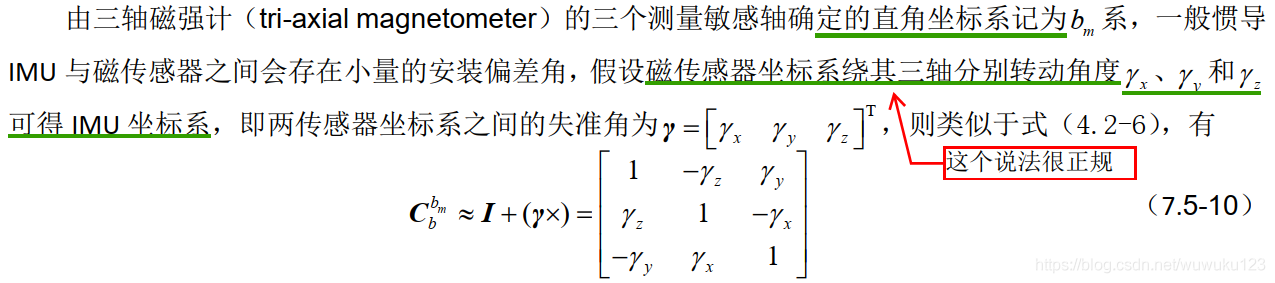
(2)三轴磁强计敏感轴确定的直角坐标系为bm,其与IMU的b系并不完全一致;
3、磁场测量误差:

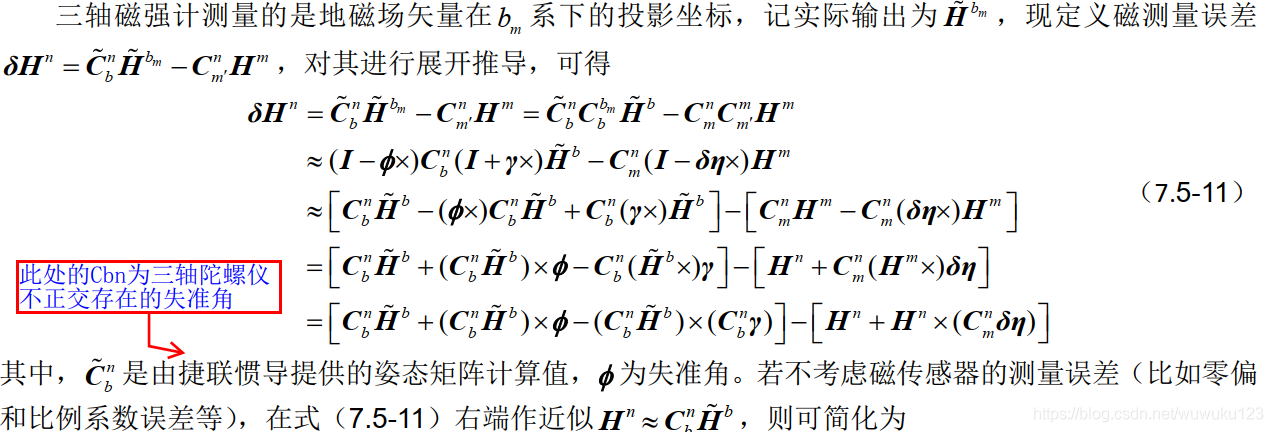
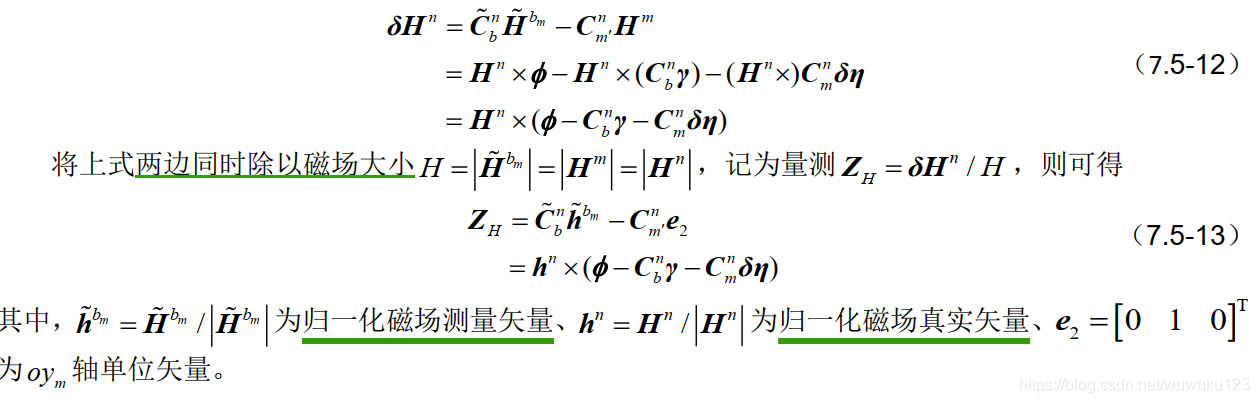
注意:在计算中,将磁场测量值进行归一化处理;磁测量误差的最后形式为:


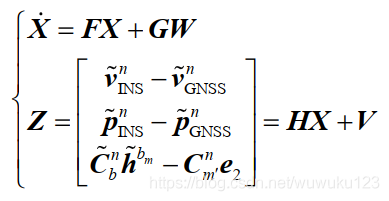
三、低成本组合导航系统模型
IMU/GPS/磁力计组合导航系统中,选取状态量为:
姿态失准角、速度误差、位置误差、陀螺仪相关漂移、加速度计相关漂移、安装偏差角(磁力计与IMU安装偏差角)、磁力计倾角、磁力计偏角;一共20维状态量;

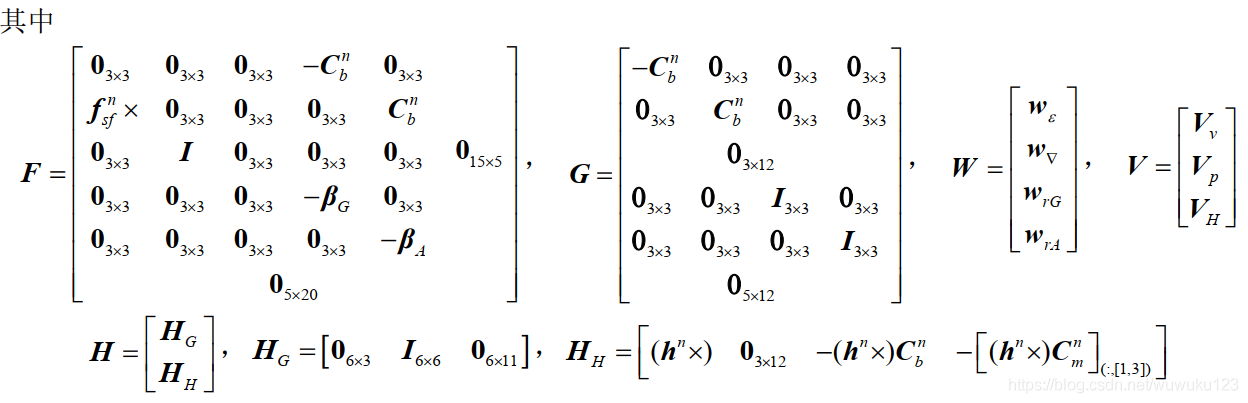
其中,系统状态空间模型为:
三、低成本惯导的姿态初始化
1、利用加速度计进行水平对准
静止条件下,速度为0;因此,其速度微分方程可写为:
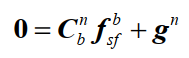
其中为了减少加速度计测量噪声和外界晃动干扰加速度的影响,常采用一段时间内的平均比力进行计算:上式经过变换得:
分量形式为:
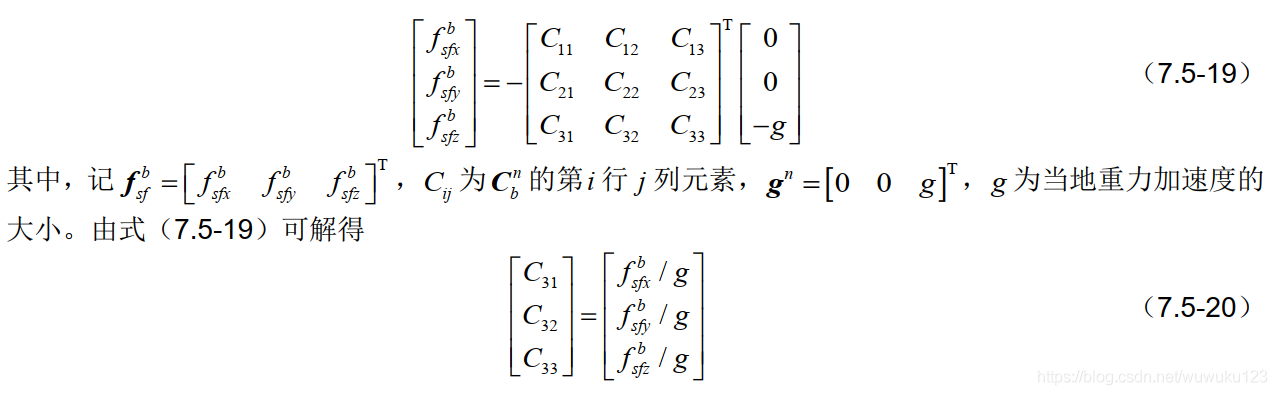
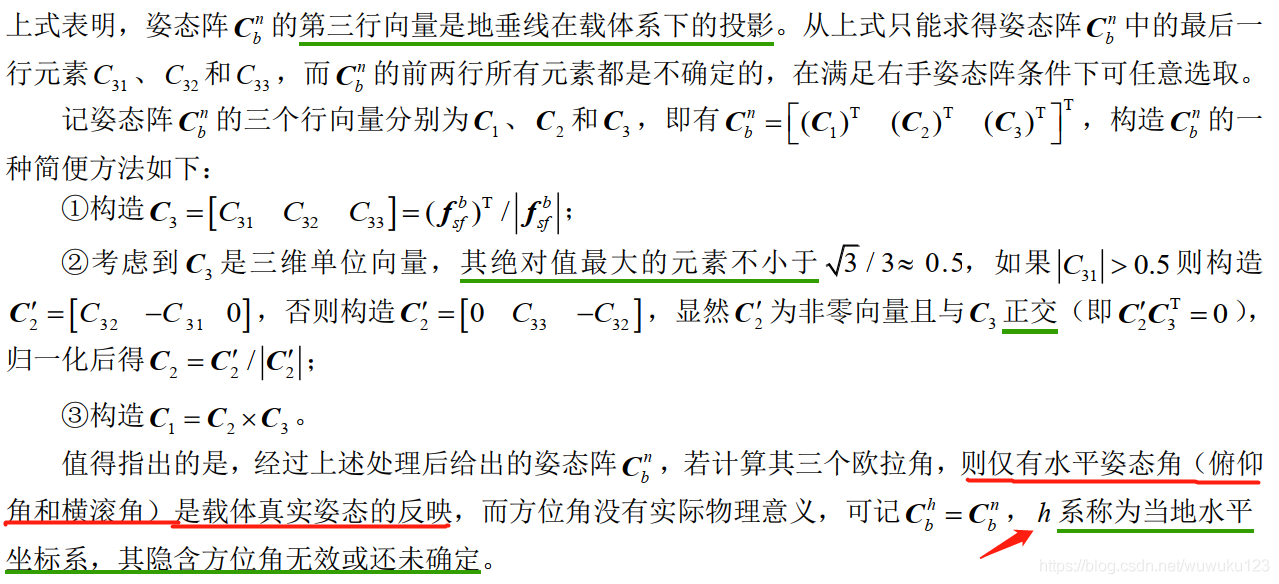
根据姿态矩阵求取欧拉角公式:

2、利用地磁测量进行方位对准
在忽略磁偏角的情况下,即磁方位角代替地理方位角;磁场坐标系为m系,由n系到m系的姿态矩阵为:

又因为,前面已经利用加速度计得到了姿态角(pitch、roll);
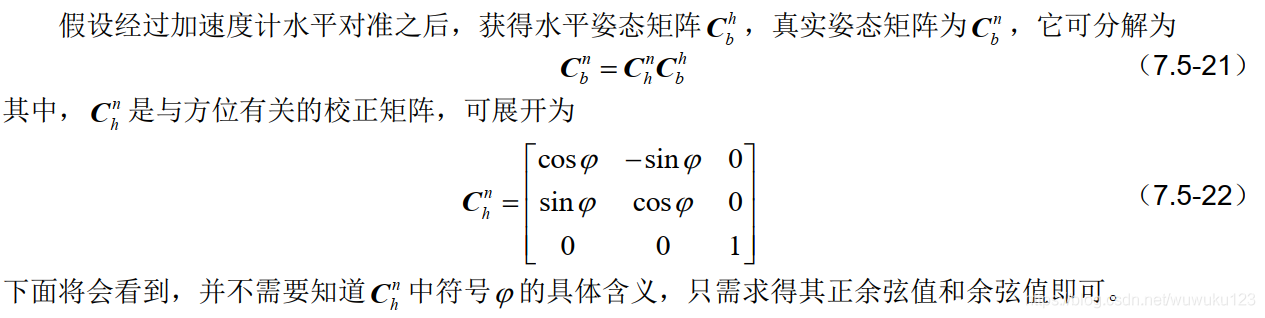
因此,三轴磁强计测量磁场为

利用Cnh和归一化地磁矢量在水平坐标系的投影,得到:

最需要注意的是hn的计算:
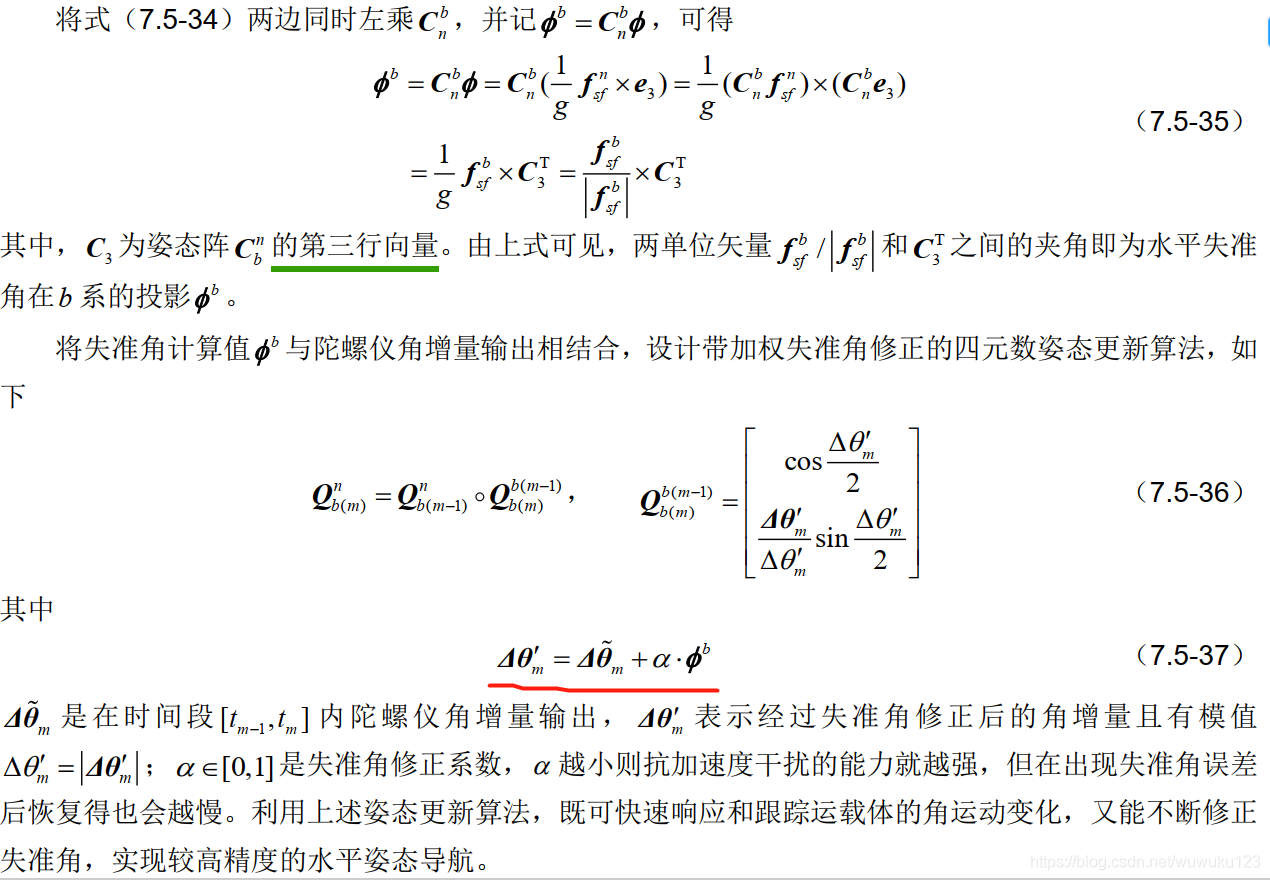
四、捷联式地平仪的工作原理
器件构成:陀螺仪和加速度计;
其中,利用陀螺仪的输出进行姿态更新(利用四元数);利用加速度计的比力输出和速度误差方程构建失准角模型;

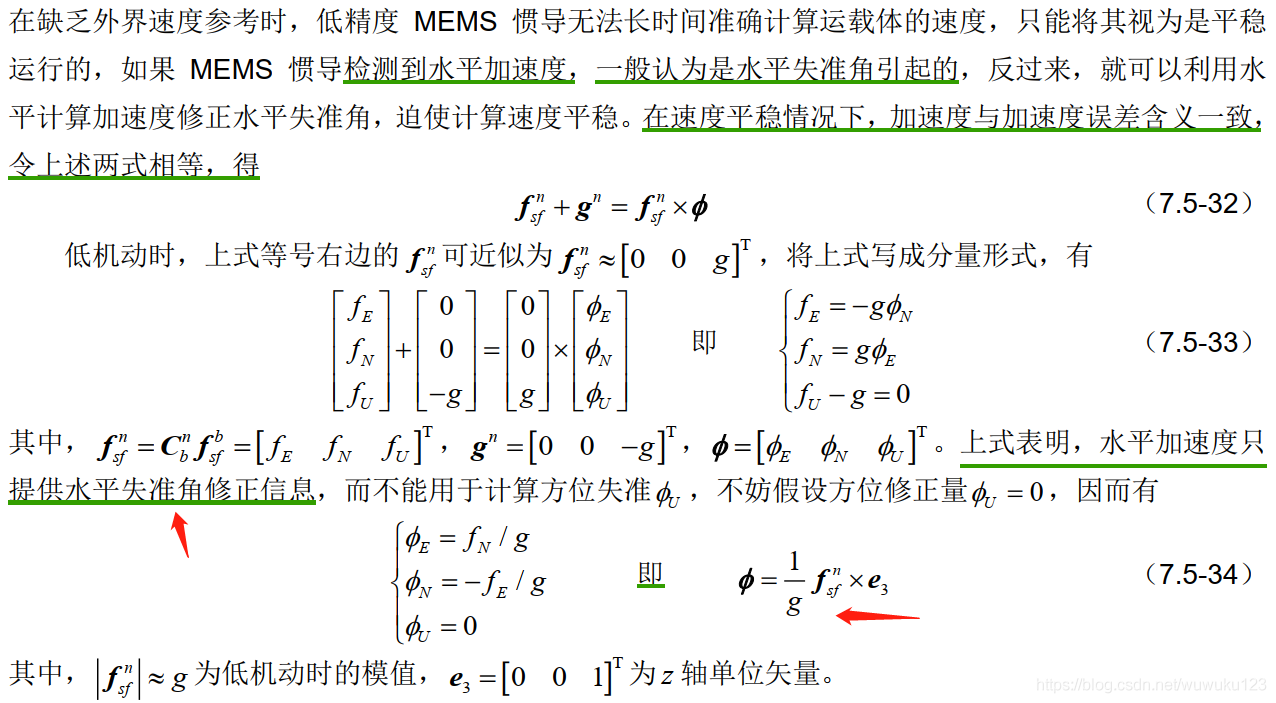
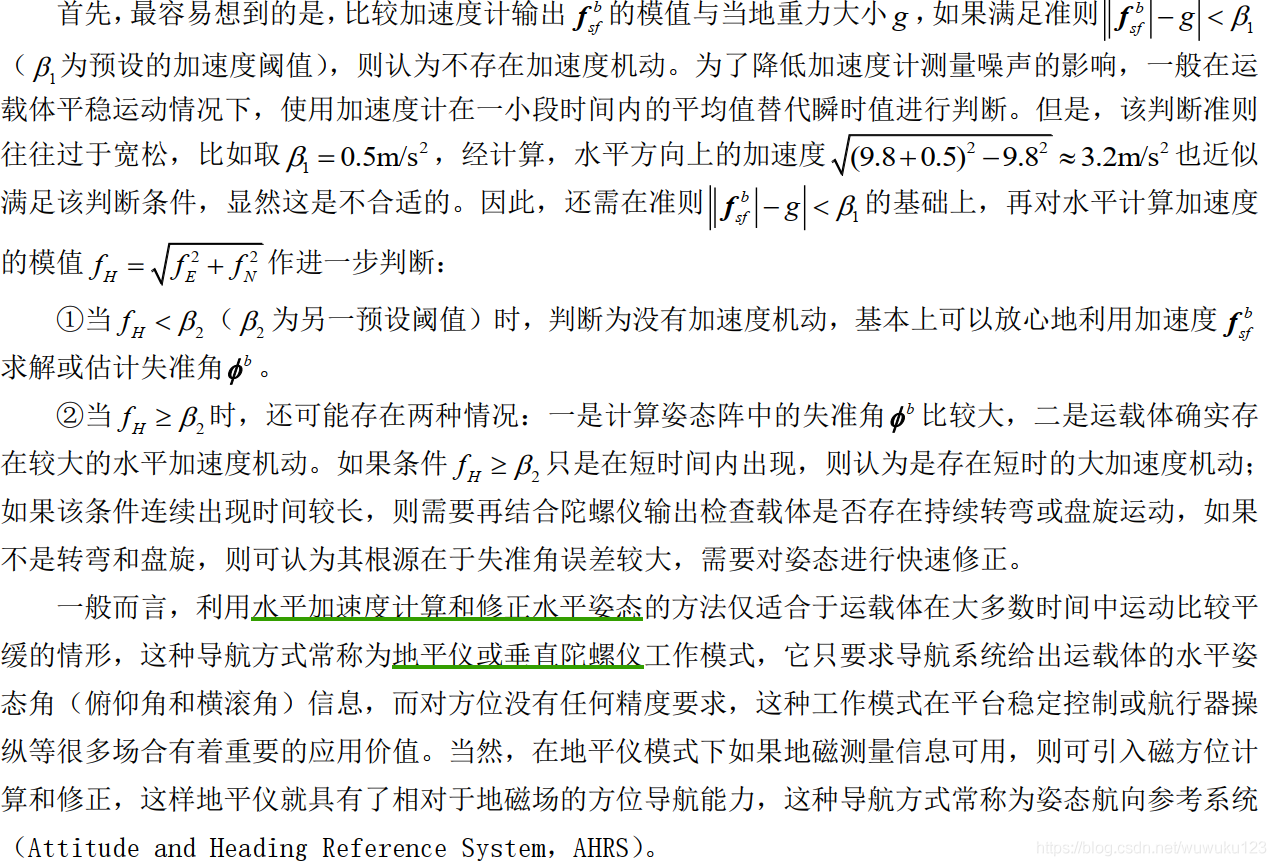
注意点:
以上的应用前提是速度平稳或低加速度环境下;因此,如何判断载体当前的运动状态尤为重要;
参考链接:《捷联惯导算法与组合导航原理讲义》




评论(0)
您还未登录,请登录后发表或查看评论