

ROS/ROS2是什么
智能时代,机器人正在向全场景的高度智能化方向进化,这对机器人开发提出了巨大挑战,机器人操作系统ROS应用而生。
那什么是ROS?什么又是ROS2呢?
接下来,我们就一起掀起ROS的神秘面纱,带领大家认识一下机器人开发中这位重量级的嘉宾。
ROS的诞生
对于越来越复杂的智能机器人系统,已经不是一个人或者一个团队可以独立完成的,如何高效开发机器人,是技术层面上非常重要的一个问题,针对这个问题,一群斯坦福大学的有志青年尝试给出一个答案,那就是机器人操作系统。

2007年,他们诞生了这样一个想法,我们有没有可能做一款个人服务机器人,帮助我们完成洗衣做饭收拾家等一切你不想做的事情,甚至还可以在你无聊的时候,陪你聊天玩耍,最后他们真的做出来了。
当时,他们深知做出这样一款机器人并不容易,机械、电路、软件等都要涉及,而且横跨很多个专业,光靠自己肯定做不到,此时他们诞生了这样一个想法:既然自己做不到,那为什么不联合所有人一起干呢?如果设计一套标准的机器人平台和其中的软件,大家都可以在这个平台上做应用开发,既然应用软件都基于同一平台,应用的分享也很容易实现,这就类似别人开发的苹果手机应用,只要你有苹果手机,同样也可以用。
说干就干,初期的机器人原型是用实验室可以找到的木头和一些零部件组成的,后期有了充足的资金,才得以实现图中这款外观精致、性能强悍的机器人——PR2,Personal Robot 2代。
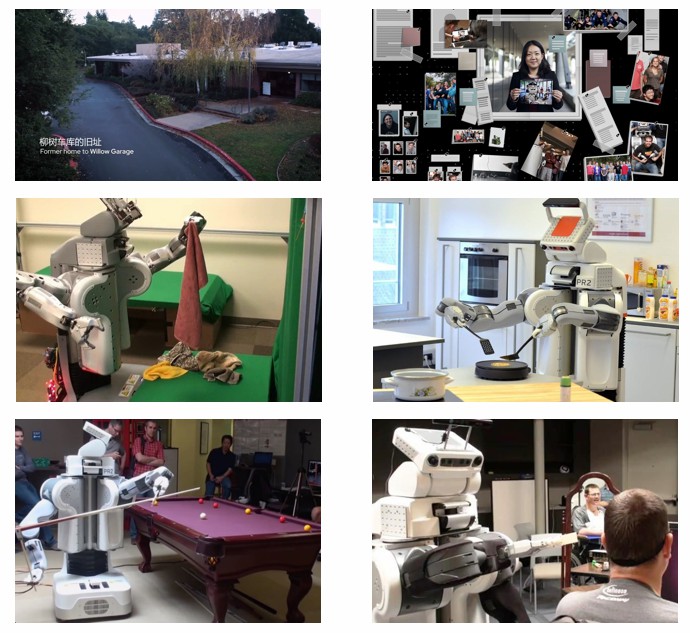
在上图中,我们可以看到PR2机器人已经可以完成叠毛巾、熨烫衣服、打台球、剪头发等一系列复杂的应用功能,以叠毛巾为例,这在当时是轰动机器人圈的重要研究,因为第一次有机器人可以完成柔性物体的处理,虽然效率很低,在100分钟之内只完成了5条毛巾的整理,但是在学术层面却推动机器人向前走了一大步。
这款机器人中的软件框架就是ROS的原型,所以ROS因这款个人服务机器人而生,很快也从中独立出来,成为一款用于更多机器人的软件系统。
ROS的发展
ROS诞生于2007年的斯坦福大学,这是早期PR2机器人的原型,这个项目很快被一家商业公司Willow Garage看中,类似现在的风险投资一样,他们投了一大笔钱给这群年轻人,PR2机器人在资本的助推下成功诞生。
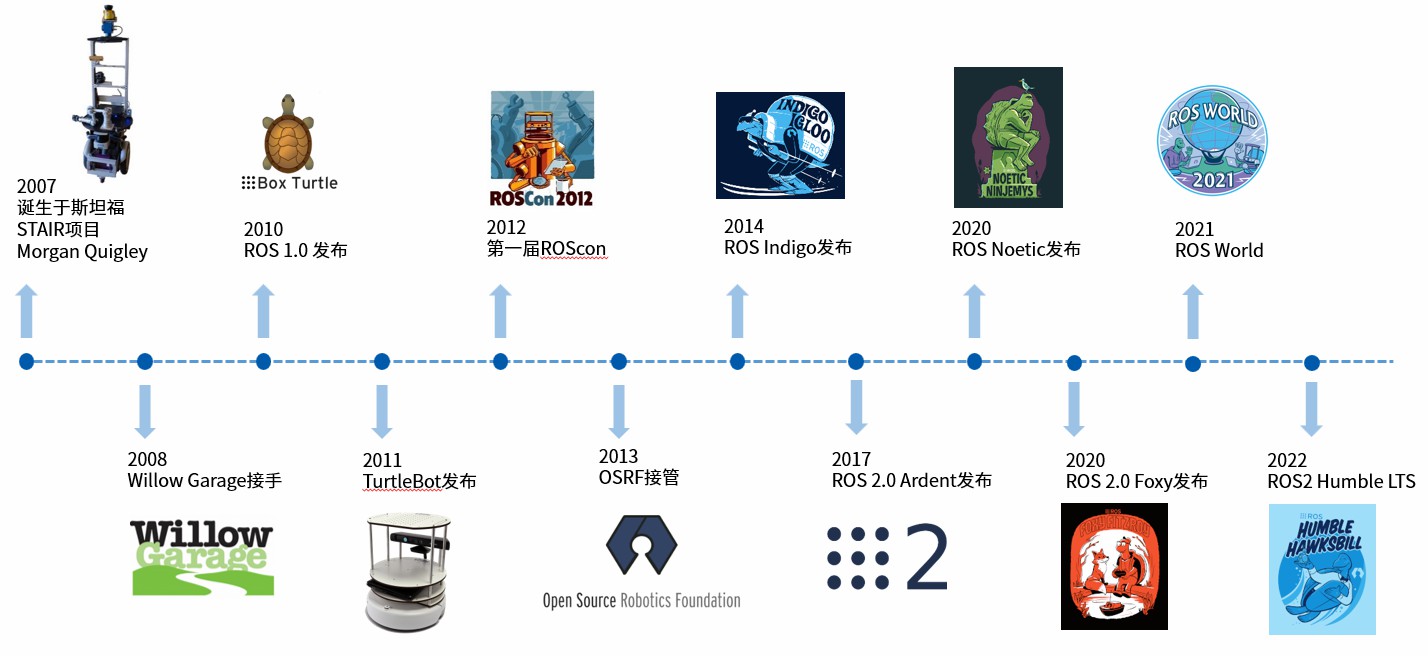
2010年,随着PR2机器人的发布,其中的软件正式确定了名称,就叫做机器人操作系统,Robot Operating System,简称为ROS。同年,ROS也肩负着让更多人使用的使命,正式开源。
PR2机器人虽好,但是成本居高不下,几百万的价格让绝大部分开发者望而却步,官方也注意到了这个问题,所以在2011年发布了一款后期成为ROS圈爆款的机器人——Turtlebot,这款机器人采用扫地机器人的底盘,加上xbox游戏机中的体感传感器Kinect,直接使用笔记本电脑就可以控制,支持ROS的所有开源功能,关键是价格便宜,随着这款机器人的普及,大大推动了ROS的应用。
从2012年开始,使用ROS的人越来越多,ROS官方也开始每年举办一届ROS开发者大会——ROS Conference,简称ROSCon,来自全球的开发者会齐聚一堂分享自己使用ROS开发的机器人应用,其中不乏亚马逊、Intel、微软等大公司的身影,近两年因为疫情原因改为线上举办,名称也变为了ROS World。
经历前几年野蛮而快速的增长,ROS逐渐迭代稳定,2014年起,ROS跟随Ubuntu系统,每两年推出一个长期支持版,每个版本支持五年时间,这标志着ROS的成熟,也让ROS加快了普及的步伐。
回到时间轴的起点,ROS的创始团队原本只想做一款个人服务机器人,万万没想到,ROS被越来越多机器人使用,受限于当初设计的局限性,ROS的问题也逐渐暴露。为了能够真正设计一款适用于所有机器人的操作系统,ROS2在2017年底正式发布,历经多年迭代,我们终于在2022年5月底,迎来了ROS2第一个长期支持版——ROS2 Humble,ROS2已经成熟,我们也进入了一个全新的ROS2时代。
从ROS发展的时间轴中,我们不仅可以了解到ROS的发展过程,更重要的是熟悉ROS和ROS2诞生的原因。
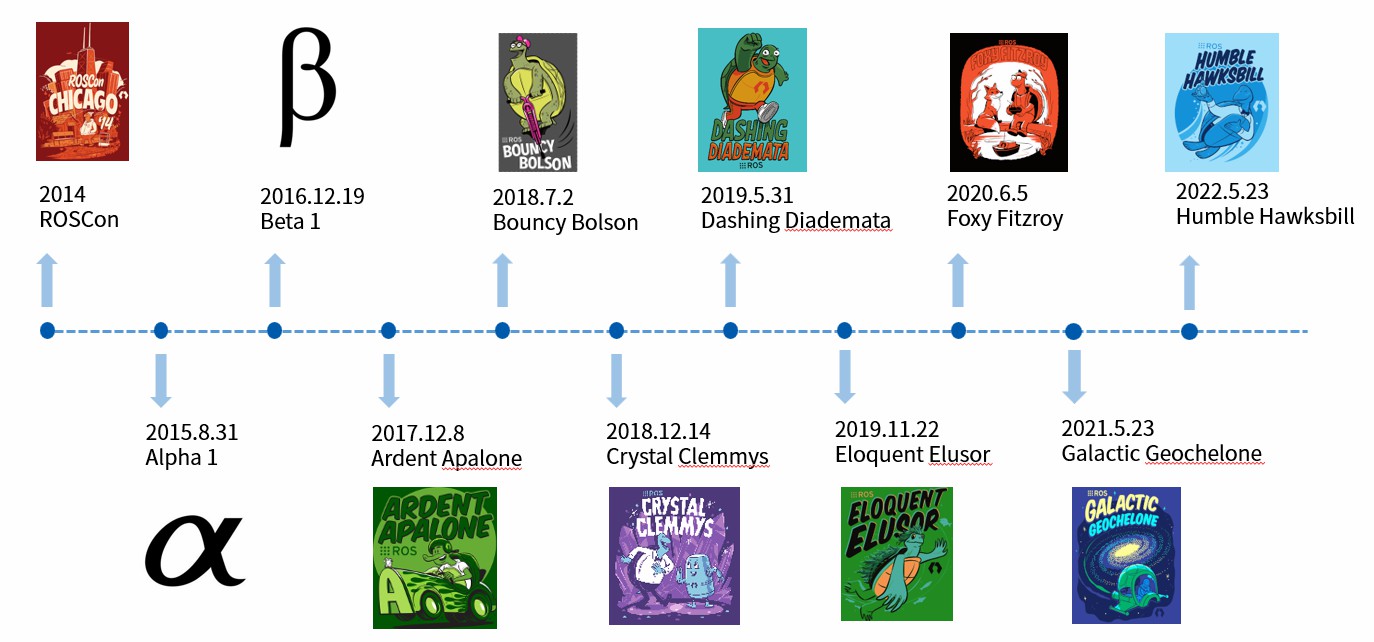
这里我们也把ROS2发展的时间轴单独提取出来,介于ROS在各种各样机器人中应用的问题,ROS2在2014年提出,2015年开始迭代,2017年推出第一个正式版,此后快速迭代,直到2022年推出了第一个长期支持版,本教程也会在该版本ROS2之上进行讲解。
ROS的特点
ROS怀揣“提高机器人软件复用率”的目标,促使社区快速发展和繁荣,时至今日,ROS已经广泛用于各种机器人的开发,无论是机械臂、移动机器人、水下机器人,还是人形机器人、复合机器人,统统都可以看到ROS的身影,ROS已经成为机器人领域的普遍标准。

提高机器人软件复用率,这个目标简单来讲就是不要重新造轮子。

正如一家做汽车的公司,从零制造汽车并不是一个明智的做法,他们通常会采购A家的轮子、B家的引擎、C家的多媒体系统,最后把这些整合到一起做成汽车。同理,我们也可以将ROS社区中已有的各种软件集合到一起,在此之上去实现自己的创意,同时还可以将自己的成果分享给别人,这样大家都可以站在巨人的肩膀上,向前走的更远,一步一步,智能机器人才会有更多沉淀和更长远的进步。

围绕这个核心目标,ROS在自身的设计上也尽量做到了模块化,由通信机制、开发工具、应用功能、生态系统四大部分组成。同时ROS具备多项特点,这里的ROS是ROS1和ROS2的总称, 比如:
- 社区是全球化的,那就可以集合全人类的智慧来推进机器人的智能化发展;
- 这些智慧的结晶都会以各种各样的应用案例在社区中沉淀下来;
- ROS本身也是完全开源的,商业许可证非常宽松;
- 对商业应用功能友好,这就代表着公司可以直接使用ROS开发商业化的机器人产品,缩短了产品的上市时间;
- ROS也可以跨平台使用,Linux、Windows、嵌入式系统都可以跑;
- ROS2中也新增了很多支持工业应用的新特性和新技术,促使ROS在越来越多领域中被使用。
ROS的社区
社区是ROS快速发展的核心动力,什么是社区呢?其实就是ROS相关资源的整合方式,比如wiki说明、问答网站、应用源码、论坛讨论等都算是社区中的元素。
ROS全球社区有几个重要网站:
- answers.ros.org,这是一个ROS问答网站,大家可以在上边提出任何关于ROS的问题,全球很多开发者都很乐意回答我们的问题;
- wiki.ros.org,这是ROS的维基百科,记录了ROS教程和各种功能包的使用;
- discourse.ros.org,这是ROS论坛,关于ROS开发的新鲜事都可以在这里发表和查看,比如ROS的活动、新功能包的发布等等。
- index.ros.org,是ROS各种资源的一个索引网站;
- packages.ros.org,是ROS功能包存储的数据库。
这几个网站的使用情况基本就可以代表ROS社区的活跃度了。
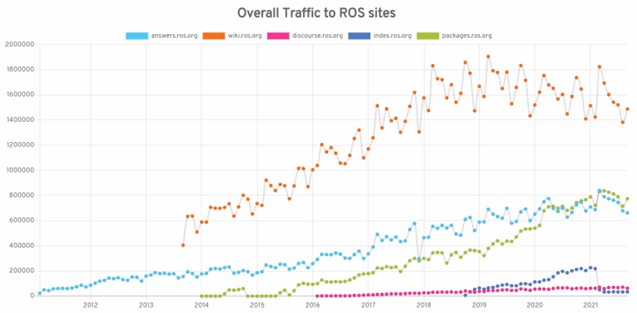
上图是近几年ROS社区页面浏览量的增长曲线,从总体趋势上来看,各项增长速度都非常快,wiki作为日常使用最为频繁的网站,使用度无疑是最高的,现在每个月有150万左右的访问量,answers和packages现在差不多,每个月有80万左右,其他两个不多,四项加起来每个月基本有250万左右的访问量,已经是一个活跃度非常棒的社区了。
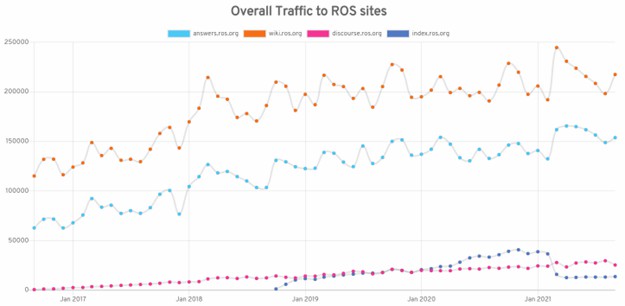
从访问人数上来看,上边这张图更为清晰,wiki每个月有20到25万人使用,answers每个月有15万人以上使用,四项加起来每个月差不多有40多万的使用人数,这些用户绝大部分都是机器人开发者,可以看到ROS使用人数是越来越多了。

这张图是根据功能包下载次数统计得到的地域排名,基本上可以代表不同国家机器人研发的活跃程度,给大家作为一个参考。
总而言之,通过这些数据,我们可以看到的是ROS发展迅猛,正在助推机器人革命这一波大浪潮,大家每一个人在其中都大有可为。
如果你希望学习机器人开发,ROS绝对会成为你开发机器人的神兵利器,本教程也绝对是你的最佳选择。
参考资料
关于本教程的参考资料,主要推荐这几个网站。
首先是最为推荐的搜索之王——Google,几乎所有问题,都可以在这里解决,作为开发工程师的同学,一定要掌握这个重要工具的使用方法。
其次是开源项目的主阵地——Github,ROS和社区中的绝大部分代码,都在这里托管,还有大量可以作为我们学习参考的开源项目都可以在这里找到,也是我们离不开的一个网站。
然后是教程网站https://book.guyuehome.com/,会提供详细的ROS2入门教程,后续也会不断更新和扩展,努力成为大家学习ROS机器人开发的百科全书,配合课程视频学习,效果会更好。
最后是本网站,这里有大量ROS机器人开发的技术内容和视频课程,还可以在泡泡板块中提问,也欢迎大家在这里和120万人分享你所学的知识。
好啦,欢迎大家来到ROS的世界,从这里开始,我们将一起踏上一段美妙的机器人开发之旅。
本系列视频公开课:https://class.guyuehome.com/detail/p_628f4288e4b01c509ab5bc7a/6


评论(0)
您还未登录,请登录后发表或查看评论