

目 录
一、摘要 1
二、正文主体 2
1.1综述 2
1.2系统整体设计 3
1.3机械结构设计 11
1.4硬件设计 14
1.5软件设计 18
1.6系统开发与调试 39
1.7结论 41
三、参考文献 42
四、致谢 43
摘要
工程机器人的机构设计是机器人研制开发的首要问题。我们根据项目的环境,首先确定了过障碍小车的整体设计方案,其次根据研制进度的需要,按重要程度由高 至低分步地进行了机构的设计、加工、装配和调试,直到满足设计要求。研究目的:掌握使用圆周舵机、白标传感器,白标传感器光感变化的强弱来判断机器人是否偏离了运行轨道,再使用程序来控制左右舵机的转速差来微调,保持机器人不偏离轨道,通过机械结构的设计以及程序的调控是小车过完一系列障碍。成果:采用履带式加独轮摆臂结构,将前轮做成倾斜式,与地面成30°夹角,通过诸如台阶,草坪时更加顺畅。结论:目前机器人能够按照大赛规定的要求,在最短时间内完成指定动作,并不会跑偏轨道。主要创新之处: 使用履带和独轮的配合使用能过掉所有障碍,车身后方添加的独轮装置。该装置采用标准舵机为装置提供旋转力,使其可以上下摆动,圆周舵机为轮子提供动力。
关键词 : 圆周舵机、白标传感器、履带、摆臂
ABSTRACT
Engineering robot mechanism design is the first problem of robot research and development. We according to the project environment, first determine the obstacle to the car’s overall design scheme, secondly according to the needs of the development progress, according to the important degree from high to low step by step to the institution design, fabrication, assembly and debugging, until meet the design requirements. Research purposes: the master using circular steering gear, White mark sensor, White mark sensor light of change of feeling to judge whether robots from orbit, then use the program to control the speed of left and right steering gear differential to fine tune, keep the robot not off track, through the control of mechanical structural design and procedure is the car after a series of obstacles. Results: the crawler and wheel swing arm structure, tilting of the front wheel make it, and ground into 30 ° Angle, through such as stairs, smooth lawn. Conclusion: at present, the robot can according to the requirements of the competition, in the shortest possible time to complete various tasks, track will not wandering. Main innovation: using crawler and wheel alone can cooperate to use over all the obstacles and rear bodywork add one-wheel device. The device adopts the standard servo device provides rotating force, make its can bobbing up and down, circular power steering gear for the wheels.
Keywords: circular steering gear, White mark sensor, caterpillar, swing arm
正 文
1.1 综述
机器人是作为现代高新技术的重要象征和发展结果,已经广泛应用于国民生产的各个领域,并正在给人类传统的生产模式带来革命性的变化,影响着人们生活的方方面面。随着市场需求的变化和制造业回流发达国家趋势的显现,我国制造业的弊端显现,在当下工业4.0的时代,以机器人、智能制造为主的新型生产方式,针对机器车过全地形的障碍为小车修正机械结构与程序的调试使机器小车能够在全地形的障碍中畅通无阻。
1.2 系统整体设计
本次比赛场地障碍较为复杂,有高低台阶,草地,斜坡,石块地形,隧道等多项复杂地形,因此,我们认为机械车的最难点在于机械结构及软件程序的调试两部分。故截止最终确定机械结构及软件程序时,经过不断改进及调试设计了多种方案,期间也查阅了大量资料。
方案一
动起来,能够识别路线是初步目标,因此,参照常见车辆结构,利用7*11孔面板、小轮,舵机,黑标传感器,主板,电源及其他辅助零件组装设计了小车,经过程序调试后,实现了初步目标,可以识别场地上的路线,自动调整小车方向实现直线行走和转弯。
该方案结构简单,因此有以下问题:
1.底盘太低,无法通过大部分障碍
2.动力不足
3.对地形的适应能力差
4.结构设计粗糙,有待优化
解决方法:
有问题太多,故方案二重新设计机械结构。
图2-1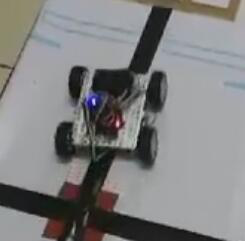
方案二
本次方案本想解决车身卡障碍的问题,因此设计了8个轮子,如下图示例
图2-2
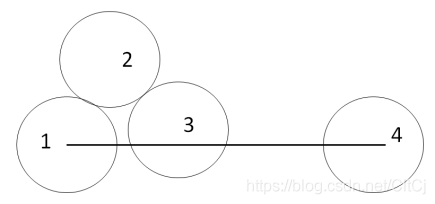
该设计可以通过栅格及防滑带这种容易被架空的障碍,因为中间的3号轮子可以起支撑作用,但此设计弊端是车身前后重量差别较大,通过比如高台阶时,下台阶会出现翻车的现象。并且安装传感器的空间非常有局限性。因为还要添加其他传感器和机械部件,因此该设方案的机械结构设计部分不可行。
方案三
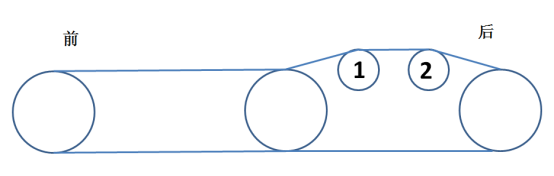
该方案最大变化是将结构设计为了履带式的,此方案小车重量相对平稳,也可以通过草地,栅格,减速带这类障碍,对地形的适应力良好,并且履带的抓地力强,原地转弯性好,隧道障碍宽度窄,因此原地转弯非常有优势。
但弊端是该结构的前后两轮子间距短,且重心高,上斜坡容易前后翻车,容纳传感器的空间还是不足,而且履带的行进速度慢,对比赛时间把控不利。
图2-3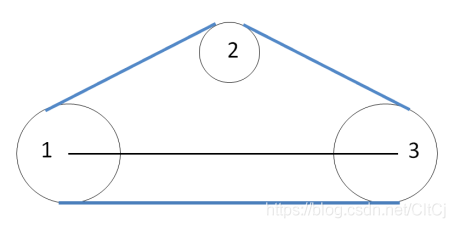
图2-4(图2-3中2号轮作为履带的张紧轮)

方案四
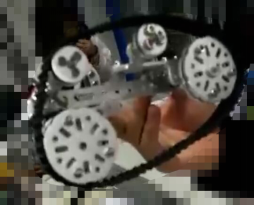

上图是在方案三基础上添加的可上下摆动的装置。其目的在于希望改进通过所有障碍的顺畅度和降低误差率,最主要目的是克服车身太短,通过高台时掉落的情况。
后面添加的摆动装置主要起支撑和提高动力的作用,可增通过阶梯,斜坡,草地时的速度。支撑轮作用是,当摆动装置抬起时,履带绷紧,而平放时,履带松弛,需要支撑轮支撑一定高度,防止履带脱落或者防止抬高过程中履带与机械轮子的卡槽错位。选择两个支撑轮是因为该装置长度不够,一个支撑轮不能提供足够高度,摆动装置抬起时1号支撑轮是悬空状态,无作用。整个装置的抬起,依靠中间的舵机加连接杆支撑,从而实现装置的上下摆动控制。
方案五
本方案对整体结构做出了很多细节性优化,除最终的高台障碍以外,其余的所有障碍都能顺利通过,因为是轮子结构,行进速度比履带式快,但原地转弯性能不如履带式。
图2-5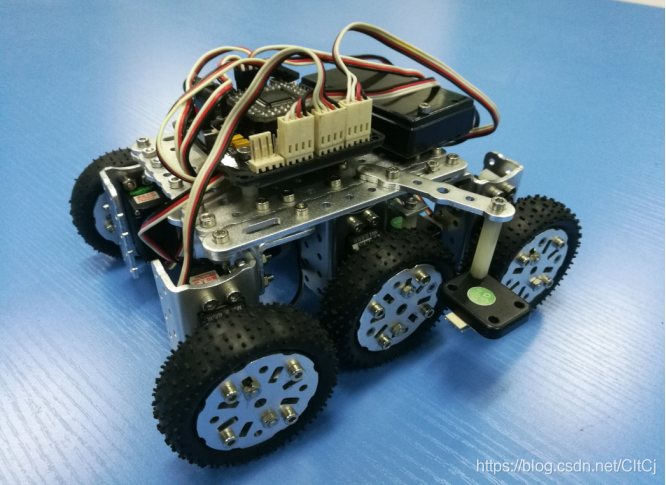
图2-6
细节优化展示:
1.采用6轮结构,且中间轮子靠里侧,主要是在保证最小小车宽度的前提下,为两侧色标传感器的安装留足够空间。
2.孔面板横向两侧各加了一个双足支杆,增大小车平板面积,从而可以使轮子左右间距扩大,为车身底部传感器的安装提供空间。
3.前后两排轮子通过添加90度支架,增加前后轮距,为底部传感器的安装增大空间,细节见图2-7、2-8。该优化策略使车身变长,上下台阶时重心平稳,不会翻车。
图2-7
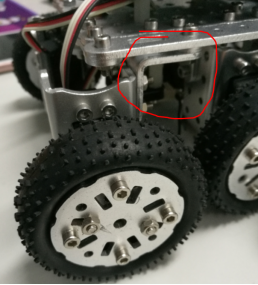
图2-8
4.除两侧的色标传感器外,其余的传感器都在小车身下方,避免了为传感器添加辅助机械结构,而导致的比如车身长,程序编写更复杂,通过障碍时传感器卡障碍的等等潜在问题。这样的结构设计也比较美观,小巧灵活。
方案六
该方案对结构进行了很多地方的修正,优化和增减。
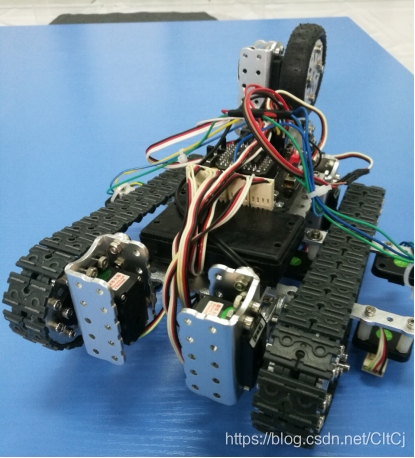
1.采用履带式结构,但轮子的结构,根据之前经验,将前轮做成倾斜式,与地面成30°夹角,通过诸如台阶,草坪时更加顺畅。且在最后的高台部分,独轮摆臂式的结构会因为车身中间悬空没有支点而掉落,但履带式则避免了该情况。

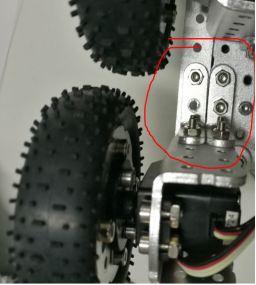
2.具有创新性思维的一点是,车身后方添加的独轮摆臂装置。该装置采用标准舵机为装置提供旋转力,使其可以上下摆动,圆周舵机为轮子提供动力。如上图所示
因为小车动力不足,上斜坡会发生上不去或者速度非常慢的情况,在后方添加独轮摆臂装置,起支撑和辅助推动左右,有效增加了上坡平稳性和速度。且该装置根据需求抬高和放下,在过高台障碍部分,当小车后半身悬空时,独轮装置放下,提供支撑,避免了因为行进速度慢而冲不过悬空间距掉落的情况。
3.该车身为所有设计中最长的,将双足支杆打磨为与7*11孔平板相同宽度,为其增加长度,一是为履带调试为最佳配合效果,二是因为为过高台而需要的长车身。并且长车身过台阶时车身倾斜角度更小,不易发生车身偏转和翻车。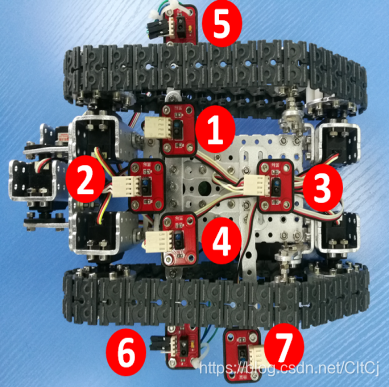
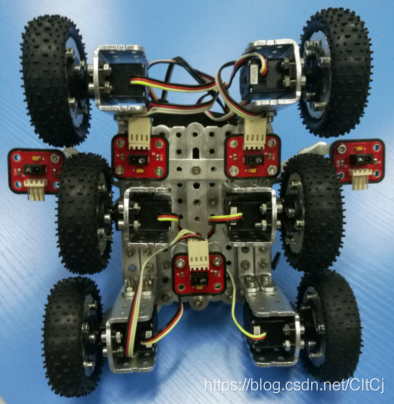
4.上图为色标传感器的分布图,1-4号传感器为黑标传感器,作用是判断线路,1号和4号黑色标传感器的位置精度要求比较高,其距离要与场地上锁设置黑色线路等宽,若有偏差,小车会发生不断左右摆动。5号和6号为白色标传感器,功能为小车转弯提供判断指令。7号传感器也为白色标传感器,功能为小车提供判断,当前位置为障碍还是平地。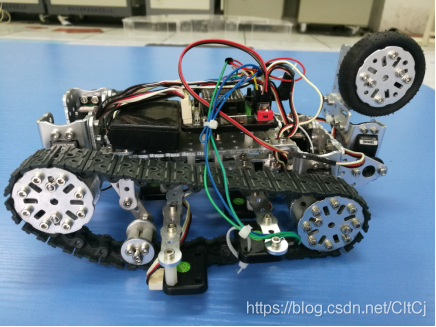
1.3 机械结构设计
机械结构的整体设计用到的零件有:5个圆周舵机、1个标准舵机、6个电机支架、6个输出头、1个U形支架、组装式履带、轮胎、10个J25小轮、4个J09垫片、7mm11mm孔平板、6个J05 90°支架、2个J23双足支架、4个J11 机械手 20 mm、4个J12 机械手 40mm、J01 10mm滑轨、3个J13 机械手驱动、1块J03 5mm7mm孔平板、ARM7主控板、P03 7.4V锂电池、2个白标传感器和5个黑标传感器。以及各种型号的螺丝、隔离柱若干。
轮胎形式的轮子是以两片J25小轮作为主要支架,中间由4个M38内螺纹隔离柱作为间隔将两片小轮分开,在外侧用M35的螺丝作为连接件将其固定,再加上轮胎。在轮子中间加上和舵机的连接片,组合而成。


我们主要选择履带作为整个车的行进方式,根据之前的以轮胎做行进方式的经验,轮胎的抓地力更强,速度快,但是过高台时当前轮通过时中两个轮子中间的间距容易卡住;以及过一些障碍时因其速度以及各方面原因容易偏离;而履带的驱动轮只卷绕履带而不在地面上滚动,机械的全部重量都压在多片履带板上使机器的牵引附着性能要好的多,过障碍要比轮式机器好过。我们选择的履带形式的轮子是以两片J25小轮作为主要支架,中间由8个M313内螺纹隔离柱作为间隔将两片小轮分开,在外侧用M35的螺丝作为连接件将其固定,组合而成。选择J25小轮作为主要的轮子结构是因为它大小适中,适合整体设计。而由8个M3*13内螺纹隔离柱作为中间的支撑因为正好适合履带的大小,每个隔离柱的距离正好适合履带的卡距,使驱动轮能够更好的与履带之间的啮合。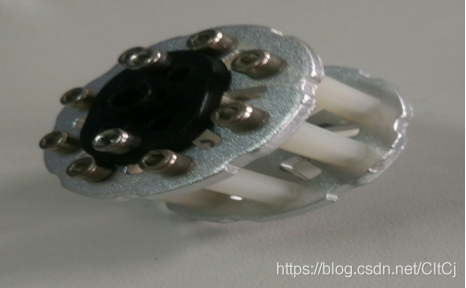
舵机选择的是圆周舵机和标准舵机。
舵机参数
参数 转速 扭力 转动角度 额定电压
标准舵机 0.13s/60° 2.9kg·cm 40.30磅·英寸 土90° 6V
圆周舵机 78r/min 2.2kg·cm 30.61磅·英寸 360° 6V
直流电机参数
减速比 额定电压 额定电流 扭力 转速
87 4.5V 180mA 5kgf·cm 69r/min
标准舵机的用途是制作摆动机构,如:关节模块等;而圆周舵机的用途是制作圆周运动的机构,如:轮子等。而圆周舵机与直流电机的区别在于,舵机是由直流电机改造而来的,比直流电机多了电路板和电位器。圆周舵机能够使用舵机函数比较方便地调整速度,只占用一个单片机端口,而直流电机的调速则要设计定时器的配置和模拟量输出函数,且通常需要占据2~3个端口。直流电机控制方便,不容易烧坏,舵机堵转后容易烧坏。舵机需要6V电压才能工作,直流电机由电池直接供电,工作电压是一个范围。圆周舵机需要寻找中值,理论中值为90,找到中值才能让舵机静止,而直流电机没有这个参数,只要不供电就可以了。综合考虑,结合机体结构,和过障碍的需要,选择舵机作为整个机器的动力提供。
主动轮的组成是圆周舵机和电机支架由4个M38螺丝将其固定,组合而成。共使用5个圆周舵机提供动力。其中4个主动轮和履带连接,作为主要的动力,另一个圆周舵机和轮胎结合组成一个辅助轮,主要是用来过障碍时提供动力和辅助作用。
选用一个标准舵机作为摆动机构,用J01 10mm滑轨连接以圆周舵机和轮胎结合组成的辅助轮。主要提供辅助轮的起降作用。
用2个J09垫片中间以3个M313内螺纹隔离柱作为间隔将两片小轮分开,在外侧用M35的螺丝作为连接件将其固定,组合而成,作为履带的支撑轮。用1个J05 90°支架和1个J12 机械手 40mm与前轮舵机连接在一起,再用1个J11 机械手 20 mm固定在J05 90°支架和J12 机械手 40mm中间使其稳固,,两个前轮均做成同样的形式。
以7mm11mm孔平板和一半J23双足支架拼接成整个机器的主板,将已做好的4个舵机装在主板上,使支撑轮与后轮在同一水平面上,支撑轮和前轮与地面形成的倾角为30°。
这样组装的理念是使车身变长,在行走中更加稳定;而让轮与地面形成30°的倾角的原因是为了更好的过障碍,使其上障碍更加方便。用U形支架与标准舵机拼接,再以J03 5mm*7mm孔平板将后轮连接在一起与之前装好的标准舵机拼装在一起。 使其在巡线的时候能够收起来,当过障碍时在使其放下来,其一是因为履带的摩擦力不够,在过障碍时不能正常通过障碍,使其在后面提供一个动力,更方便通过障碍,其二是因在前轮做成倾角式,在过窄桥的时候会翻车,所以使其车身变得长一点,和重心往后调一下,保证其不会翻,,能够稳定的从窄桥上下来;其三是为了上高台,因为高台和窄桥中间有一定的距离,原来的车身在上高台的时候,当前身上去的时候后后边脱离窄桥,重心在后边会掉下去,所以加一个支撑使其在重心没有通过窄桥和高台中间的间隙时使其掉下去,其四在能够满足过其他障碍时有又能同时在不妨碍过隧道,在过隧道的时候能够把其收起来。综上所述,加上这个辅助轮能够满足一些以前不能够过的障碍,同时还不妨碍过其它的障碍。
用1个J23双足支架作为主要模型,在辅以3个J12 机械手 40mm、2个J13 机械手驱动、2个J11 机械手 20 mm和1个J01 10mm滑轨做成一个装置传感器的模块,使其成为模块化,这样方便其拆卸和调试。
主控板选择的是ARM7主控板,ARM7主控板是使用非常广泛的一款主控板。它具有4个传感器端口、六个舵机端口、2个输出端口以及1个红外通信端口。传感器端口和红外通信进行了反插处理,增加了使用安全性。一般的传感器都是三根线,但是这款主控板的传感器端口预留了一个备用针,因此都是四针的。同样的处理在舵机端口也存在,舵机也是3根针的,因此在搭接时最上面一根针是空闲的,这些空闲的备用针为后期二次开发提供了方便。所以选择这款主控板。将其装在车身的四分之三的位置处。电池选择的是P03 7.4V锂电池,将其装在整个车身的四分之二处,因为车身后边加有辅助轮,整个重心靠后,所以将电池安装在车身的前端,使其整个重心不至于整体偏后。
1.4 硬件设计
1、主控板部分(晶振:11.0592M)
我们此次选用ARM7为主控板,其主要特点是ARM7系列是低功耗的32位RISC处理器中的一员(AdvancedRISCMachines),适用于对价位与功耗要求较高的一系列消费类应用。ARM7的内核是0.9MIPS/MHz的三级流水线和冯·诺伊曼结构。同时,ARM7TDMI提供了非常好的性能--功耗比。它包含了THUMB指令集快速乘法指令和ICE调试技术的内核.ARM7支持USB、蓝牙、UCOS-Ⅱ操作系统、C语言、RRS图形化软件、手柄编程和用户自定义开发。
微处理器系列
ARM7微处理器系列具有如下特点:
*具有嵌入式ICE-RT的逻辑,调试开发时方便。
*极低的功耗,适合对功耗要求较高的应用。
*提供了0.9MIPS/MHz的三级流水线结构。
*代码密度高并兼容16位的Thumb指令集。
*对操作系统的支持广泛,包括Windows CE、Linux、Palm OS等。
*指令系统与ARM9系列、ARM9E系列和ARM10E系列兼容,便于用户的产品升级换代。
*主频最高可达130MIPS,高速的运算处理能力能胜任绝大多数的复杂应用。
ARM7适用于那些需要功能强大的RISC处理器,可应用于系统电讯、数据通信、协议转换、掌上电脑、自动控制系统、发动机管理、便携式计算机、单元信息存贮、系统存储卡、GSM终端控制等方面。
ARM7系列微处理器的主要的应用领域是:工业控制、Internet设备、网络和调制解调器设备、移动电话等多种多媒体和嵌入式应用。
ARM提供一系列内核、体系扩展、微处理器和系统芯片方案。由于所有产品均采用一个通用的软件体系,所以相同的软件可在所有产品中运行。使用的产品如下(4_1)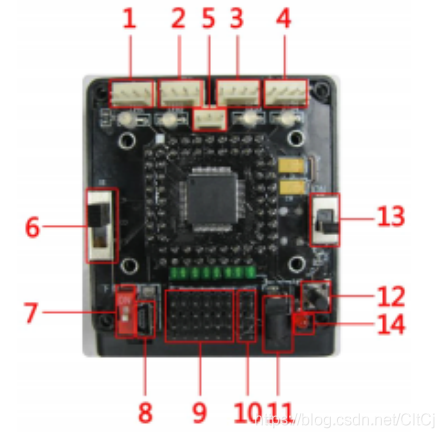
(4-1)
我们使用的主控制板电路图(4-2):
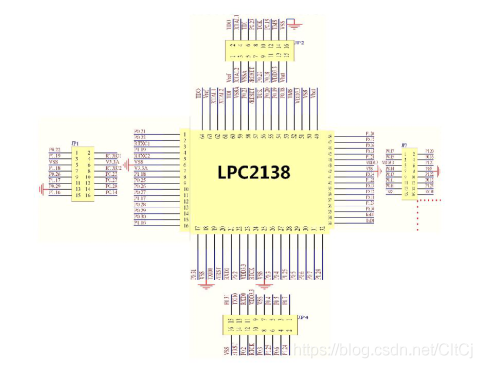
(4-2)
2、传感器部分
传感器的主要特点是:微型化、数字化、智能化、多功能化、系统化、网络化,促进了传统产业的改造、更新换代,且还可能建立新型工业。套件中包括了,闪动传感器,通过光线的晃动来判断。光强传感器,通过感受光线的强度变化来判断。声控传感器,通过感受声响,接受距离大致2m以外。近红外传感器,感受红外线物体的靠近。黑标传感器、触碰传感器等。
传感器数据采集,数据采集的意义与任务。在生产过程中,对工艺参数进行采集,为提高质量。作用,能够降低成本,提供准确的信息. 在科学研究中,获取微观, 动静态的信息。 意义:为了 解决依靠人不能解决的问题. 解决掉靠人不能解决的问题。其任务,采集传感器输出的模拟信号,并转化成所需的数字信息,然后传入,系统再对数字信号进行处理。其功能一般有:采集数据,按照采样的周期,对模拟数字,开关信号进行采样等。
在生产过程中要进行—个明确的测量工作,要考虑选用哪一种原理的传感器,这就要分析传感器的多方面因素,进而确定。即便在测量同一物理量时,就会有多种原理的传感器可以选用,那么何种原理的传感器更加合适,就需要根据被测量的特点和传感器的使用条件考虑到以下的一些具体问题:量程的大小;测量方式为接触式还是非接触式;被测位置对传感器体积的要求;信号的引出方法,有线、是非接触测量;传感器的来源,国产或是进口,价格是否承受。
此次我们选用了得是白标传感器,属于中断型。其主要参数有:线性度、灵敏度、迟滞、重复性、漂移等。可识别到1cm以上宽度的白色标记,在较近的距离检测到障碍。(工作电压4.4-5.5V,工作电流:1.2mA)
3、舵机部分
套件中包括16个标准舵机,8个圆周舵机,具有速度和角度的调节功能。我们使用的是圆周舵机,其可以作为直流电机使用。(工作电源:4.8-6V,其工作电源:10mA;扭力:2.2kg/cm)。
圆周舵机是在标准舵机的基础上进行改造,拆除了标准舵机中电位器和减速箱之间的反馈电路,导致标准舵机的电机不能够判断自身的转动角度,进而持续转动,因此,圆周舵机在软件控制原理上与标准角度舵机相同,由PWM来控制。好比,在相同的控制参数下,对标准舵机是控制转动角度,而对圆周舵机而言,是控制转速。
舵机控制函数Servo(uint8 Num,uint16 Ang),第一个参数为插接在主控制板上的输出端口的序号,第二个参数的范围在0~180之间,该参数对圆周舵机而言,越接近0或180,舵机转动速度越快,反之越慢,参数等于90时圆周舵机停止转动,由于舵机硬件的误差,舵机停止转动的参数往往不等于90,一般是在90左右。因此,圆周舵机的停止参数值大小需要人为的设定,对圆周舵机的控制也以此值为标准。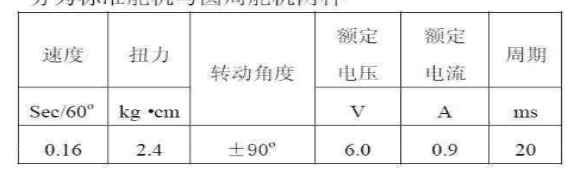
本次的主要参数:
单片机工作频率:2MHz
串口速率:9600bps
红外检测距离:20cm-500cm
机器人最快速度:78mm/s
编码器分辨率:33脉冲/转
驱动轮直径:75mm,宽度:21mm
两驱动轮中心矩:155mm
1.5 软件设计
程序的编写部分代码
*1电源接口和电池接口
#include "config.h" #include "lib_io.h" #include "lib_arm.h" #include "lib_io_uart_lpc2138.h" int main(void) { Initial_ARM();
{int s;int i;int a;
while(1){ s=0; for (i=0;i<3;i++) //依次读取3个传感器的触发状态,并给变量s的低3位分别置0或者置1 { s=s|(Input(i+1,1)<<i); if (Input(i+1,1)==1) LedIn(i+1,2); else LedIn(i+1,0); }
1.舵机控制
让小车做出一系列动作的核心是舵机的控制,在实验器材中的圆周舵机和标准舵机(可以180°的范围内指定角度的旋转)中,我们选用了圆周舵机,能够实现正反向圆周转动。
通过多次的实验,发现圆周舵机能够控制的范围在0到180,在90°时舵机停止了。从舵机外部看,大于90顺时针旋转,小于则是逆时针旋转,若值偏离90越大,速度越大。了解到了两种舵机的特性后,选用了圆周舵机用于轮子的传动,通过对左右轮的旋转角度,速度的控制,实现小车的左转、右转、前进、后退等一系列动作具体见程序。因为圆周舵机的初始位置和数值的对应关系不确定,因而要通过实验来确定好参数。
2.传感器控制
本次套件中包含了有许多传感器,初步方案中我们选用了,黑标、白标传感器,通过一次次实验,发现使用白标传感器较为合理,能控制到所需的距离,其能对外部环境不同条件的信息接收。获到正确的传感器输入值,作出相应的反应动作。
1.6 系统开发与调试
1.舵机的种类
在我们能够使用的舵机有,标准舵机与圆周舵机。
标准舵机各类参数,转速0.13s/60°,扭力2.9kg·cm/40.30磅·英寸,转动角度±90°,额定电压6v。
圆周舵机各类参数,转速78r/min,扭力2.2kg·cm/30.16磅·英寸,转动角度360°,额定电压6v。
2.舵机的选取
在舵机的选取中我们选择了圆周舵机来作为机器人运动时轮子旋转的驱动装置,以此舍去了标准舵机。在参数中可见标准舵机转动的角度限制,无法满足我们的所需条件。
工作原理:舵机三根线分别为GND(黑色)、Vcc(供电,红色)和信号线(白色),控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。其工作流程为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。
传感器:在我们能够使用的传感器有,触碰传感器,触碰开关闭合时触发,可用作按钮或碰撞开关,接触式感应;触须传感器,弹簧向两侧弯曲时触发,可做仿生昆虫触角,接触式感应;光强传感器光线变暗时触发,可用作仿生夜间生物活动的触发装置;近红外传感器,接收端前方5cm以内有障碍物时触发,可用于避障、跟随等;黑标传感器,可识别白色背景中的黑色区域、空旷空间,可用于走黑标和悬崖识别;白标传感器,可识别黑色背景中的白色区域,可用于机器人走白标;声控传感器,接收到50分贝以上声音时触发,如正常拍手,可用作声控装置;控传感器闪动传感器,接收到光线明暗闪烁时触发,可用于识别物体经过、挥手、闪光等。
传感器的选取:在根据现有的条件和环境,我们初步选取了黑标传感器和白标传感器。在机器人的组装完成之后,我们选择了黑标传感器。根据黑标传感器的光感变化的强弱,来判断机器人是否偏离了运行轨道。再使用程序来控制左右舵机的转速差来微调,保持机器人不偏离轨道。我们在让机器人过草坪时会卡在草坪上。原因是因为安装在机器人上的黑标传感器的位置太低,阻碍了机器人的运行。于是我们舍去了黑标传感器,转而选择白标传感器。
工作原理:在我们使用的白标传感器是通过把光强度的变化转换成电信号的变化来实现的控制,光电传感器一般分为:发送器、接收器和检测电路。发送器对准目标发射光束,发射的光束一般来源于半导体光源,发光二极管(LED)、激光二极管及红外发射二极管。光束不间断地发射,或者改变脉冲宽度。接收器有光电二极管、光电三极管、光电池组成。在接收器的前面,装有光学元件如透镜和光圈等。在其后面是检测电路,它能滤出有效信号和应用该信号。此外,光电开关的结构元件中还有发射板和光导纤维。三角反射板是结构牢固的发射装置。它由很小的三角锥体反射材料组成,能够使光束准确地从反射板中返回,具有实用意义。它可以在与光轴0到25的范围改变发射角,使光束几乎是从一根发射线,经过反射后,还是从这根反射线返回。
ARM7主控板:ARM7是一块嵌入式芯片的主控板。美国电气和电子工程师协会对嵌入式系统的定义:“用于控制、监视或者辅助操作和设备的装置。”中国国内普遍认同的定义:以应用为中心,计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗等严格要求的专用计算机系统。它总共有4个输入端口,6个舵机端口、2个输出端口以及1个红外线通信端口。
调试:在机器的运行过程中,我们发现机器人在走巡线时走不直,过障碍时总是会跑偏。于是我们调整了,舵机之间的平行度和垂直度。让误差最小化,再次运行时就发现这些问题都有所改善,但是并不是做得更好。每个细节的误差,到最后都会被反应成一个更大的误差。为了让机器在走巡线的时候更加的平直,我们在程序里细化了这部分的微调。当外部硬件与程序的精密控制。在过巡线时,基本满足了我们的要求。在过巡线的时候转弯的地方,机器总是不能正确的拐弯。会在程序里加入自动修正的程序,以此来达到来辨识。在爬坡的时候,机器人是上不去的。于是我们分析是动力不足,于是调大了动力的。依旧存在爬坡无力的情况。再次分析过后,我们将机器人的轮子换成履带,来增大与斜坡的摩擦力。情况得到改善。爬上斜坡之后,在下坡的阶段,机器人是从斜坡上翻下来。而非正常的滑下,于是我们做出调整,将机器的重心降低。再次运行的时候便没有出现类似的状况。我们让机器在阶梯上运行,总是出现机器偏向一边的状态。我们初步分析,可能是支撑点与重心不重合,于是机器总是歪向一遍。经过分析我们在车尾,加了一个导向轮以此来弥补上台阶的缺陷。再次运行的时候,这种情况得到改善。 在上高台的部分,总是会出现从会从中间掉下去。前面已经搭上高台,后方掉下去。我们认为是动力不足的原因,但是并不是这个原因。我们试图在车尾搭一个架子来,来弥补悬空的前方动力的不足。再次运行,机器上高台。后尾的轮子,显然弥补了很大的空间。机器在上高台上,即便以小于90°的方向上高台,车子依旧正常运行。
1.7 结论
整个设计过程中,在机器人的机械结构上我们曾经遇到了很大的困难,好几次的设计 都由于设计不符合要求已经被改的面目全非,好在团队成员的团结合作下,最终解决了机械机构问题。,按照理论规划的数据在加上我们的实际操作,我们最终确定使用方案六参加此次“中国工程机器人大赛暨国际公开赛”,原因是方案六完全解决了前五个方案所产生的问题,不会再出现:底盘太低,无法通过大部分障碍、动力不足,无法冲上斜坡、重心高,上斜坡容易前后翻车,容纳传感器的空间不足,履带的行进速度慢,无法上高台等问题。方案六灵活的采用履带式和单轮结合的机械结构,在轮子的结构上,根据之前经验,将前轮做成倾斜式,与地面成30°夹角,使车子过台阶和草坪栅格等障碍时更加顺畅。具有创新性思维的一点是,车身后方添加的独轮装置。该装置采用标准舵机为装置提供旋转力,使其可以上下摆动,在履带车后方添加独轮装置,起支撑和辅助推动左右,有效增加了上坡平稳性和速度。且该装置根据需求抬高和放下,在过高台障碍部分,当小车后半身悬空时,独轮装置放下,提供支撑,避免了因为行进速度慢而冲不过悬空间距掉落的情况。
整个工程车的研发无疑是一个充满辛苦的过程,在团队成员的共同努力下,我们最终完成了整个工程车的调试制作。
参考文献
【1】郭天祥,51单片机C语言教程-入门、提高、开发、拓展全攻略,北京,电子工业出版社,2009,(1):8-16,(2):17-20:(3):41(4):521-522
【2】王滨生、刘辉、刘佳男、郑世杰、毛文睿,模块化机器人创新教学与实践:“探索者”模块化机器人平台系列,哈尔滨,2016,(1):4-22
(2):28-31(3):202\
致 谢
在做过障碍小车的过程中,我们发现做这个做小车本身就是一个很好的学习机会,机器人 大赛给我们一个自我锻炼与学习的机会,在完成自小车机械制作的过程中,我们计划安排了时间。在机械确定、硬件设计方面,我们比较挑选方案,亲手制作了多个模型,通过网络、 实地购买,才完整买到所有电子元件。进行软件编程时,遇到了各式各样的麻烦,我们尽心与耐心,一部分一部分进行调试,最终进行总体调试,当我们看到整个机器人开始工作时,先前的所有辛苦与疲惫也灰飞烟灭。能够完成作品,那种成就感和欣慰,没有经历是永远无法体会其中那份无以言表的感受。能顺利完成这件作品,首先感谢我们的指导老师陆翔宇老师,他密切关心作品的进度,耐心指导,给我们所需的帮助。在整个过程中学习和体会了很多东西,不仅加强了我们的动手能力,在专业技术和知识方面也有所巩固和加深。我们的交际能力也得到了锻炼,还开拓了我们的视野,同时也给予了我们书本上学不到的知识。


评论(0)
您还未登录,请登录后发表或查看评论