

ArduPilot飞行前检查 主要包括两个部分:
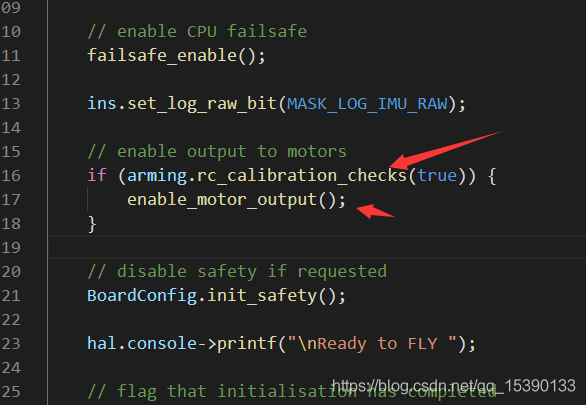
1. 初始化中遥控器输入检查;
2. 1Hz解锁前检查。
附: 显示地面站信息
参考文章:Ardupilot Pre-Arm安全检查程序分析
1. 初始化中遥控器输入检查
直接跳转进去查看函数为;
bool AP_Arming_Copter::rc_calibration_checks(bool display_failure)
{
const RC_Channel *channels[] = {
copter.channel_roll,
copter.channel_pitch,
copter.channel_throttle,
copter.channel_yaw
};
copter.ap.pre_arm_rc_check = rc_checks_copter_sub(display_failure, channels)
& AP_Arming::rc_calibration_checks(display_failure);
return copter.ap.pre_arm_rc_check;
}
可见里面是对遥控器通道的检查,只有检查通过之后,才允许最后PWM输出。(此时输出为ShutDown状态)
2. 1Hz解锁前检查
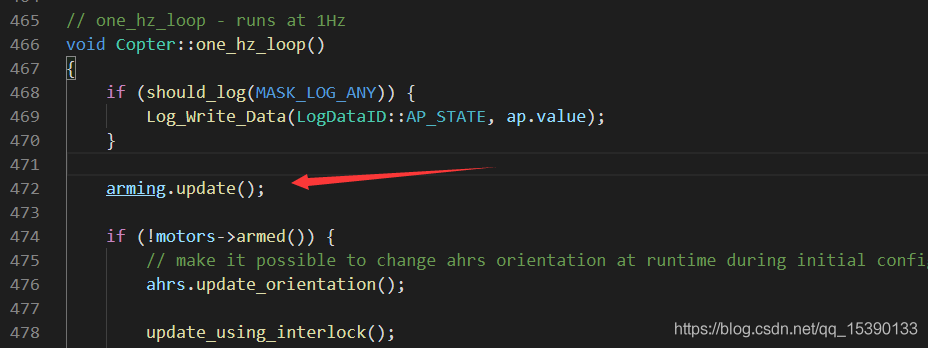
// performs pre-arm checks. expects to be called at 1hz.
void AP_Arming_Copter::update(void)
{
// perform pre-arm checks & display failures every 30 seconds
static uint8_t pre_arm_display_counter = PREARM_DISPLAY_PERIOD/2;
pre_arm_display_counter++;
bool display_fail = false;
if (pre_arm_display_counter >= PREARM_DISPLAY_PERIOD) {
display_fail = true;
pre_arm_display_counter = 0;
}
pre_arm_checks(display_fail);
}
执行跳转后为:
bool AP_Arming_Copter::pre_arm_checks(bool display_failure)
{
const bool passed = run_pre_arm_checks(display_failure);
set_pre_arm_check(passed);
return passed;
}
再次跳转查看,得:
bool AP_Arming_Copter::run_pre_arm_checks(bool display_failure)
{
// exit immediately if already armed
if (copter.motors->armed()) {
return true;
}
// check if motor interlock and Emergency Stop aux switches are used
// at the same time. This cannot be allowed.
if (rc().find_channel_for_option(RC_Channel::AUX_FUNC::MOTOR_INTERLOCK) &&
rc().find_channel_for_option(RC_Channel::AUX_FUNC::MOTOR_ESTOP)){
check_failed(display_failure, "Interlock/E-Stop Conflict");
return false;
}
// check if motor interlock aux switch is in use
// if it is, switch needs to be in disabled position to arm
// otherwise exit immediately. This check to be repeated,
// as state can change at any time.
if (copter.ap.using_interlock && copter.ap.motor_interlock_switch) {
check_failed(display_failure, "Motor Interlock Enabled");
}
// if pre arm checks are disabled run only the mandatory checks
if (checks_to_perform == 0) {
return mandatory_checks(display_failure);
}
return fence_checks(display_failure)
& parameter_checks(display_failure)
& motor_checks(display_failure)
& pilot_throttle_checks(display_failure)
& oa_checks(display_failure)
& gcs_failsafe_check(display_failure) &
AP_Arming::pre_arm_checks(display_failure);
}
同时,在最后一句 AP_Arming::pre_arm_checks(display_failure);中,我们继续深挖,可以看到还有如下检查内容:
bool AP_Arming::pre_arm_checks(bool report)
{
#if !APM_BUILD_TYPE(APM_BUILD_ArduCopter)
if (armed || require == (uint8_t)Required::NO) {
// if we are already armed or don't need any arming checks
// then skip the checks
return true;
}
#endif
return hardware_safety_check(report)
& barometer_checks(report)
& ins_checks(report)
& compass_checks(report)
& gps_checks(report)
& battery_checks(report)
& logging_checks(report)
& manual_transmitter_checks(report)
& mission_checks(report)
& rangefinder_checks(report)
& servo_checks(report)
& board_voltage_checks(report)
& system_checks(report)
& can_checks(report)
& proximity_checks(report)
& camera_checks(report)
& aux_auth_checks(report);
}
显示地面站信息:
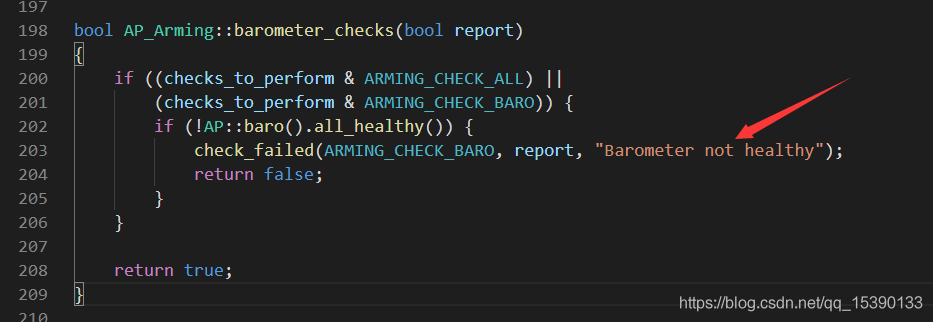
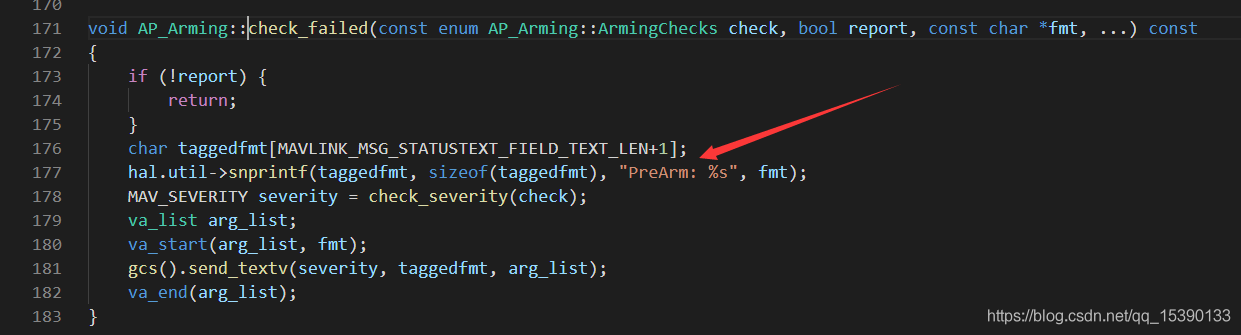
通过这样的组合,我们就在地面站上看到了 熟悉的 PreArm: Barometer not healthy



评论(0)
您还未登录,请登录后发表或查看评论