

文章目录
前言
RVIZ是ROS提供的一款3D可视化工具,其作为一种可扩展化的视图工具,可以使用插件机制添加丰富的功能模块。RVIZ中常用的激光数据、图像数据的可视化显示其实都是官方提供的插件。
下面,通过实现一个速度控制的插件,熟悉rviz plugin插件的实现过程。
这篇文章源码来自胡老师的书-《ROS机器人开发实践》。
一、功能描述
界面如图:

该插件使用Qt开发,包含三个输入框,分别是话题名、线速度和角速度。
二、创建功能包
命令如下:
catkin_create_pkg rviz_teleop_commander roscpp rviz std_msgs
这个功能包依赖于RVIZ,因为RVIZ是基于Qt开发的,所以不需要单独列出对Qt的依赖。
三、代码实现
1、创建teleop_pad.h文件
文件内容如下:
#ifndef TELEOP_PAD_H
#define TELEOP_PAD_H
//所需要包含的头文件
#ifndef Q_MOC_RUN
#include <ros/ros.h>
#include <ros/console.h>
#include <rviz/panel.h> //plugin基类的头文件
#endif
class QLineEdit;
namespace rviz_teleop_commander
{
// 所有的plugin都必须是rviz::Panel的子类
class TeleopPanel: public rviz::Panel
{
// 后边需要用到Qt的信号和槽,都是QObject的子类,所以需要声明Q_OBJECT宏
Q_OBJECT
public:
// 构造函数,在类中会用到QWidget的实例来实现GUI界面,这里先初始化为0即可
TeleopPanel( QWidget* parent = 0 );
// 重载rviz::Panel积累中的函数,用于保存、加载配置文件中的数据,在我们这个plugin
// 中,数据就是topic的名称
virtual void load( const rviz::Config& config );
virtual void save( rviz::Config config ) const;
// 公共槽.
public Q_SLOTS:
// 当用户输入topic的命名并按下回车后,回调用此槽来创建一个相应名称的topic publisher
void setTopic( const QString& topic );
// 内部槽.
protected Q_SLOTS:
void sendVel(); // 发布当前的速度值
void update_Linear_Velocity(); // 根据用户的输入更新线速度值
void update_Angular_Velocity(); // 根据用户的输入更新角速度值
void updateTopic(); // 根据用户的输入更新topic name
// 内部变量.
protected:
// topic name输入框
QLineEdit* output_topic_editor_;
QString output_topic_;
// 线速度值输入框
QLineEdit* output_topic_editor_1;
QString output_topic_1;
// 角速度值输入框
QLineEdit* output_topic_editor_2;
QString output_topic_2;
// ROS的publisher,用来发布速度topic
ros::Publisher velocity_publisher_;
// ROS节点句柄
ros::NodeHandle nh_;
// 当前保存的线速度和角速度值
float linear_velocity_;
float angular_velocity_;
};
} // end namespace rviz_teleop_commander
#endif // TELEOP_PANEL_H
2、创建teleop_pad.cpp文件
文件内容如下:
#include <stdio.h>
#include <QPainter>
#include <QLineEdit>
#include <QVBoxLayout>
#include <QHBoxLayout>
#include <QLabel>
#include <QTimer>
#include <geometry_msgs/Twist.h>
#include <QDebug>
#include "teleop_pad.h"
namespace rviz_teleop_commander
{
// 构造函数,初始化变量
TeleopPanel::TeleopPanel( QWidget* parent )
: rviz::Panel( parent )
, linear_velocity_( 0 )
, angular_velocity_( 0 )
{
// 创建一个输入topic命名的窗口
QVBoxLayout* topic_layout = new QVBoxLayout;
topic_layout->addWidget( new QLabel( "Teleop Topic:" ));
output_topic_editor_ = new QLineEdit;
topic_layout->addWidget( output_topic_editor_ );
// 创建一个输入线速度的窗口
topic_layout->addWidget( new QLabel( "Linear Velocity:" ));
output_topic_editor_1 = new QLineEdit;
topic_layout->addWidget( output_topic_editor_1 );
// 创建一个输入角速度的窗口
topic_layout->addWidget( new QLabel( "Angular Velocity:" ));
output_topic_editor_2 = new QLineEdit;
topic_layout->addWidget( output_topic_editor_2 );
QHBoxLayout* layout = new QHBoxLayout;
layout->addLayout( topic_layout );
setLayout( layout );
// 创建一个定时器,用来定时发布消息
QTimer* output_timer = new QTimer( this );
// 设置信号与槽的连接
// 输入topic命名,回车后,调用updateTopic()
connect( output_topic_editor_, SIGNAL( editingFinished() ), this, SLOT( updateTopic() ));
// 输入线速度值,回车后,调用update_Linear_Velocity()
connect( output_topic_editor_1, SIGNAL( editingFinished() ), this, SLOT( update_Linear_Velocity() ));
// 输入角速度值,回车后,调用update_Angular_Velocity()
connect( output_topic_editor_2, SIGNAL( editingFinished() ), this, SLOT( update_Angular_Velocity() ));
// 设置定时器的回调函数,按周期调用sendVel()
connect( output_timer, SIGNAL( timeout() ), this, SLOT( sendVel() ));
// 设置定时器的周期,100ms
output_timer->start( 100 );
}
// 更新线速度值
void TeleopPanel::update_Linear_Velocity()
{
// 获取输入框内的数据
QString temp_string = output_topic_editor_1->text();
// 将字符串转换成浮点数
float lin = temp_string.toFloat();
// 保存当前的输入值
linear_velocity_ = lin;
}
// 更新角速度值
void TeleopPanel::update_Angular_Velocity()
{
QString temp_string = output_topic_editor_2->text();
float ang = temp_string.toFloat() ;
angular_velocity_ = ang;
}
// 更新topic命名
void TeleopPanel::updateTopic()
{
setTopic( output_topic_editor_->text() );
}
// 设置topic命名
void TeleopPanel::setTopic( const QString& new_topic )
{
// 检查topic是否发生改变.
if( new_topic != output_topic_ )
{
output_topic_ = new_topic;
// 如果命名为空,不发布任何信息
if( output_topic_ == "" )
{
velocity_publisher_.shutdown();
}
// 否则,初始化publisher
else
{
velocity_publisher_ = nh_.advertise<geometry_msgs::Twist>( output_topic_.toStdString(), 1 );
}
Q_EMIT configChanged();
}
}
// 发布消息
void TeleopPanel::sendVel()
{
if( ros::ok() && velocity_publisher_ )
{
geometry_msgs::Twist msg;
msg.linear.x = linear_velocity_;
msg.linear.y = 0;
msg.linear.z = 0;
msg.angular.x = 0;
msg.angular.y = 0;
msg.angular.z = angular_velocity_;
velocity_publisher_.publish( msg );
}
}
// 重载父类的功能
void TeleopPanel::save( rviz::Config config ) const
{
rviz::Panel::save( config );
config.mapSetValue( "Topic", output_topic_ );
}
// 重载父类的功能,加载配置数据
void TeleopPanel::load( const rviz::Config& config )
{
rviz::Panel::load( config );
QString topic;
if( config.mapGetString( "Topic", &topic ))
{
output_topic_editor_->setText( topic );
updateTopic();
}
}
} // end namespace rviz_teleop_commander
// 声明此类是一个rviz的插件
#include <pluginlib/class_list_macros.h>
PLUGINLIB_EXPORT_CLASS(rviz_teleop_commander::TeleopPanel,rviz::Panel )
// END_TUTORIAL
四、编译插件
1、创建plugin的描述文件
在功能包根目录下,创建plugin的描述文件,文件名为plugin_description.xml,内容如下:
<library path="lib/librviz_teleop_commander">
<class name="rviz_teleop_commander/TeleopPanel"
type="rviz_teleop_commander::TeleopPanel"
base_class_type="rviz::Panel">
<description>
A panel widget allowing simple diff-drive style robot base control.
</description>
</class>
</library>
2、修改package.xml文件
在package.xml文件中添加plugin_description.xml文件路径,内容如下:
<export>
<rviz plugin="${prefix}/plugin_description.xml"/>
</export>
3、修改CMakeLists.txt文件
添加编译规则,内容如下:
## This plugin includes Qt widgets, so we must include Qt like so:
find_package(Qt5 COMPONENTS Core Widgets REQUIRED)
set(QT_LIBRARIES Qt5::Widgets)
## I prefer the Qt signals and slots to avoid defining "emit", "slots",
## etc because they can conflict with boost signals, so define QT_NO_KEYWORDS here.
add_definitions(-DQT_NO_KEYWORDS)
## Here we specify which header files need to be run through "moc",
## Qt's meta-object compiler.
qt5_wrap_cpp(MOC_FILES
src/teleop_pad.h
)
## Here we specify the list of source files, including the output of
## the previous command which is stored in ``${MOC_FILES}``.
set(SOURCE_FILES
src/teleop_pad.cpp
${MOC_FILES}
)
## An rviz plugin is just a shared library, so here we declare the
## library to be called ``${PROJECT_NAME}`` (which is
## "rviz_plugin_tutorials", or whatever your version of this project
## is called) and specify the list of source files we collected above
## in ``${SOURCE_FILES}``.
add_library(${PROJECT_NAME} ${SOURCE_FILES})
## Link the library with whatever Qt libraries have been defined by
## the ``find_package(Qt4 ...)`` line above, and with whatever libraries
## catkin has included.
##
## Although this puts "rviz_plugin_tutorials" (or whatever you have
## called the project) as the name of the library, cmake knows it is a
## library and names the actual file something like
## "librviz_plugin_tutorials.so", or whatever is appropriate for your
## particular OS.
target_link_libraries(${PROJECT_NAME} ${QT_LIBRARIES} ${catkin_LIBRARIES})
## END_TUTORIAL
## Install rules
install(TARGETS
${PROJECT_NAME}
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
install(FILES
plugin_description.xml
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION})
做好上述修改后,就可以编译该功能包了,命令如下:
catkin_make --pkg rviz_teleop_commander
五、运行插件
首先运行roscore,命令如下:
roscore
运行RVIZ,命令如下:
rosrun rviz rviz
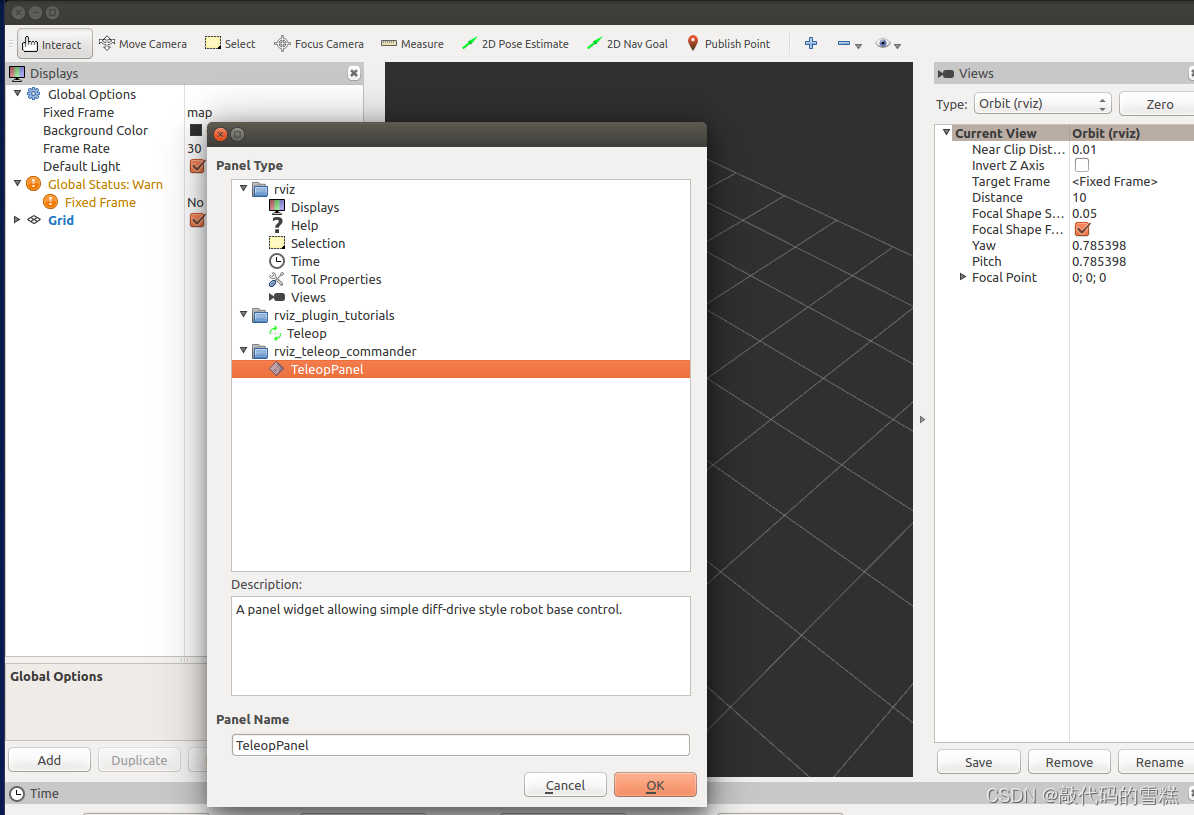
点击菜单栏中的Panels选项,选择Add New Panel,在插件列表中就可以看到刚刚创建的插件,如图:
点击OK后,就可以看到,该插件的界面,输入参数值,如下: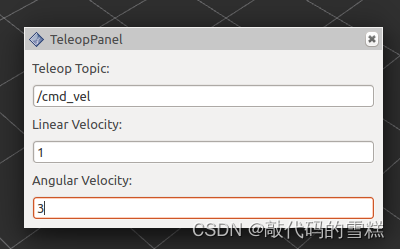
运行命令:
rostopic echo /cmd_vel
效果如下: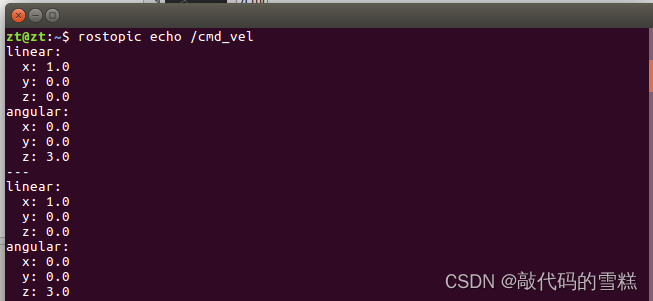
可以看到ROS中已经有节点在发布/cmd_vel话题的消息了。



评论(0)
您还未登录,请登录后发表或查看评论