
ros2 launch racing_obstacle_detection_yolo racing_obstacle_detection_yolo.launch.py
在运行nodehub上给出的项目时,报下面的错误,但是在文件中找不到multi_model_task_delegation.cpp文件
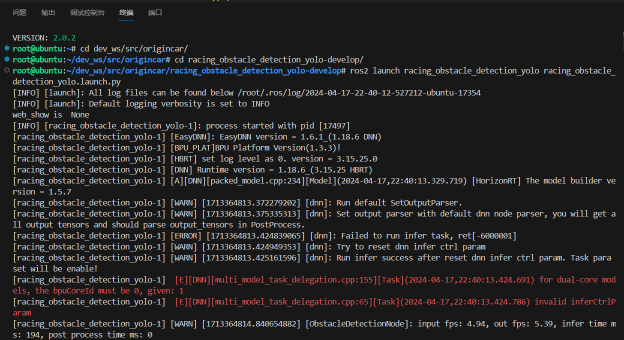
ros2 launch racing_obstacle_detection_yolo racing_obstacle_detection_yolo.launch.py
在运行nodehub上给出的项目时,报下面的错误,但是在文件中找不到multi_model_task_delegation.cpp文件
您还未登录,请登录后发表或查看评论




第三方账号登入
QQ 微博 微信