
引言
我们已经知道如何已知角度去推算机械臂末端的位置,那么如何由位置反推出机械臂到达需求位需要的角度呢?逆向运动学
基本过程就是已知手臂末端点的位置{H}(机器手head)或者该坐标系相对于世界坐标系{W}的向量,求出关轴的角度目录
几何法
代数法
数值法
综合例题
Tips:从多个解中选择的方法
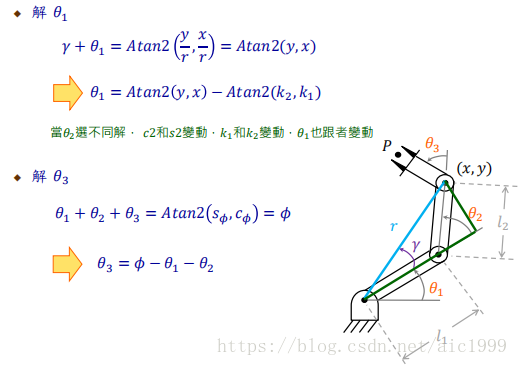
几何法
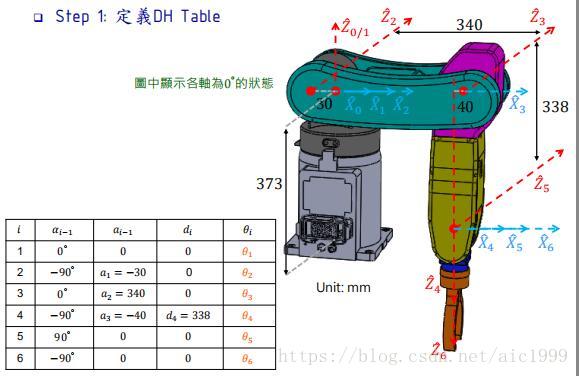
顾名思义,直接利用几何关系和定理求解即可。在这里直接引出经典的PUMA机械臂案例。 【举例】已知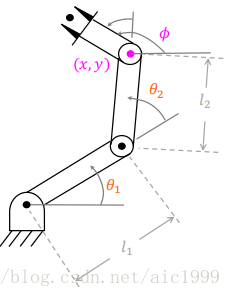 【求解过程】
【求解过程】
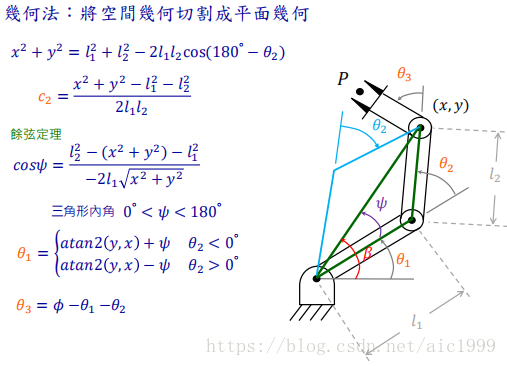 上图表明了
上图表明了 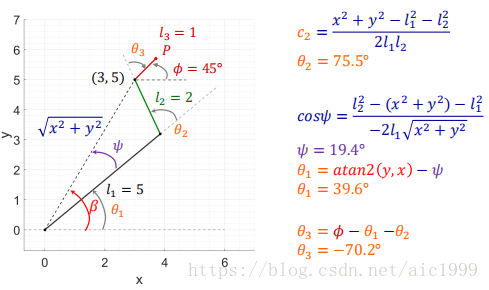
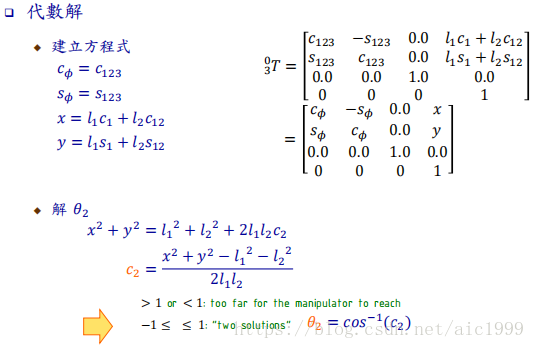
代数法
【例题】和上面例题一样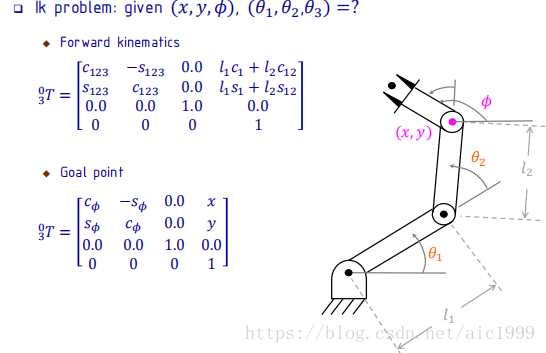 【求解过程】
【求解过程】
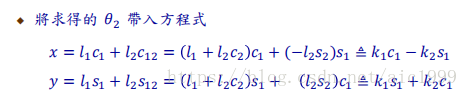 代数,并使用极坐标知识,可以得出:(小声bb:现在才知道高中数学的重要性....)
代数,并使用极坐标知识,可以得出:(小声bb:现在才知道高中数学的重要性....)
数值法
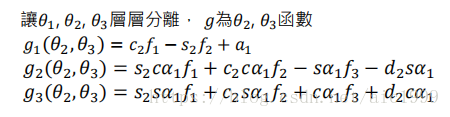
列出每个关节的T矩阵,让电脑自己往里面带入数据,数字一个一个跑,直到求出解为止。 反算出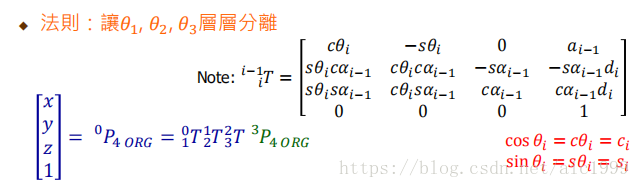 使用代数法运算,为了方便求解,我们先定义好代数式 f, g
使用代数法运算,为了方便求解,我们先定义好代数式 f, g
 可以知道f 是有关
可以知道f 是有关
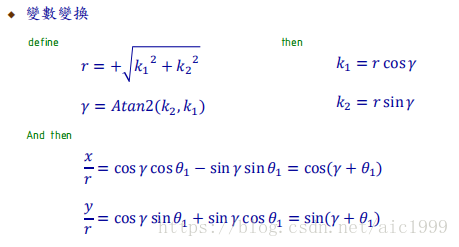
 在这里先假设代数 K:
在这里先假设代数 K:
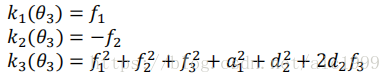
 可以知道r是有关
可以知道r是有关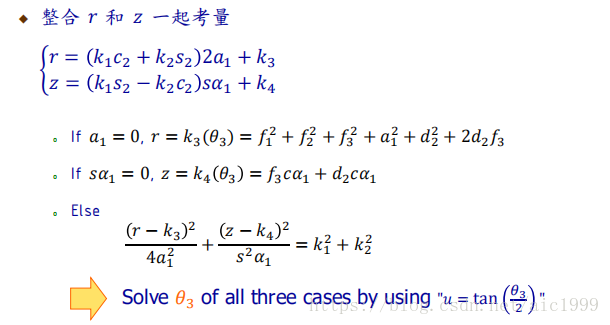 即可联系已知求解
即可联系已知求解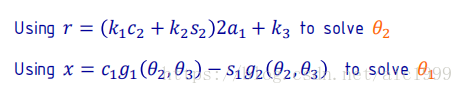 (2)求解
(2)求解 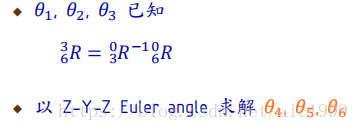 【这里的求解过程参考(2)】
【这里的求解过程参考(2)】
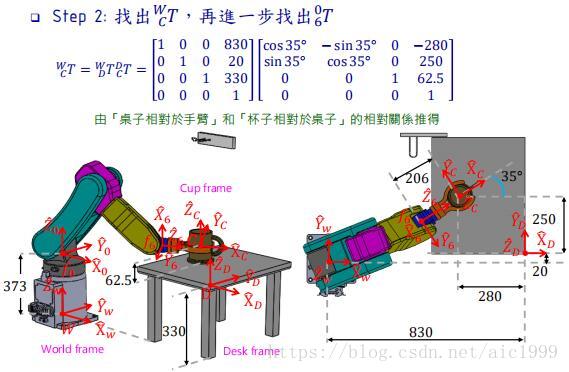
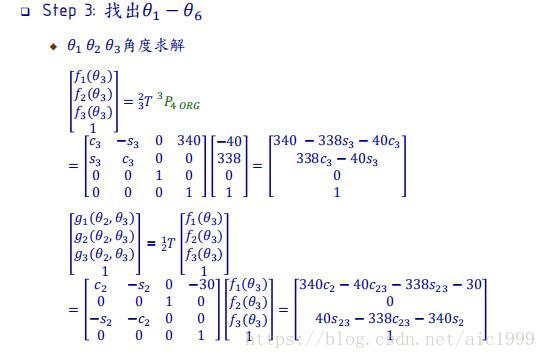
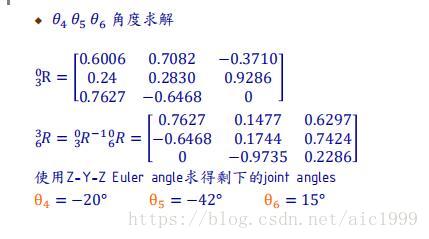
综合例题
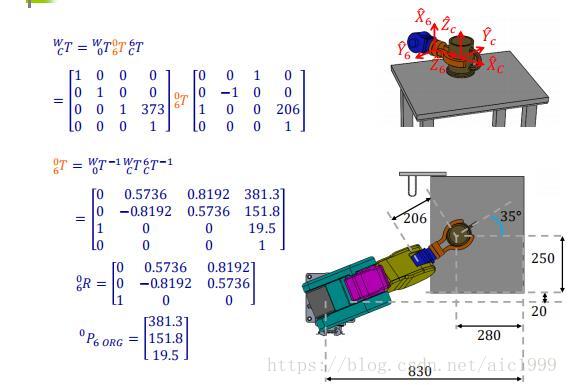
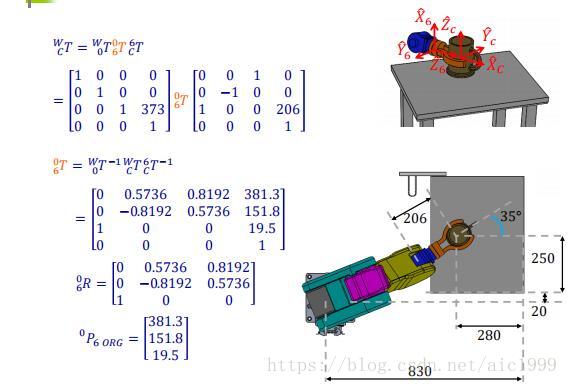
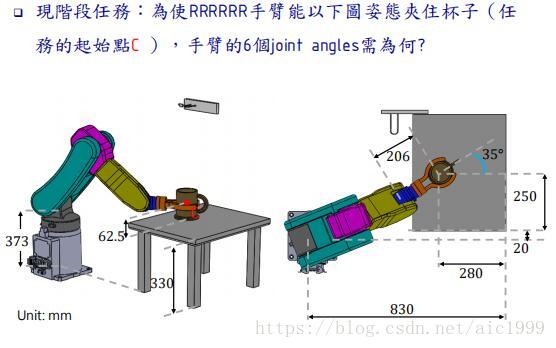 【解题过程】
【解题过程】

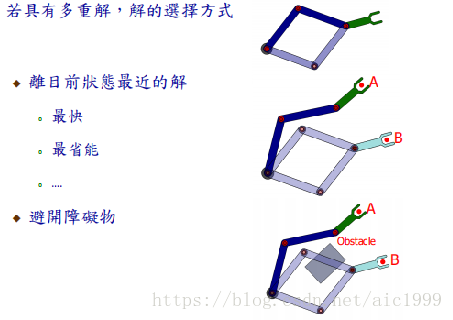
Tips:从多个解中选择的方法
 感谢:课程内容、PPT来自林沛群教授的课程《机器人学》!!!
感谢:课程内容、PPT来自林沛群教授的课程《机器人学》!!! 

评论(0)
您还未登录,请登录后发表或查看评论