
D-H表达法(Denavit-Hartenberg)
DH表达法有两个通用版本,一个是标准版(standard),一个是craig版本,在这先使用craig版本作解释。 一般(驱动)关节(joint)分为两种:转轴(R型,revolute)或者 滑动杆 / 平移(P型,prismatic)目录
如何构建DH表格
相关例题
DH表的作用
相关例子(PUMA560)
扩展(选读)
DH表达法的另一个版本(标准版)
复合型关节如何得到驱动数值
如何构建DH表格
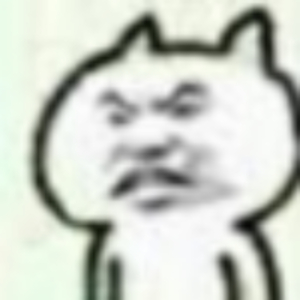
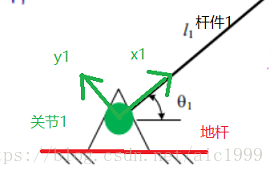
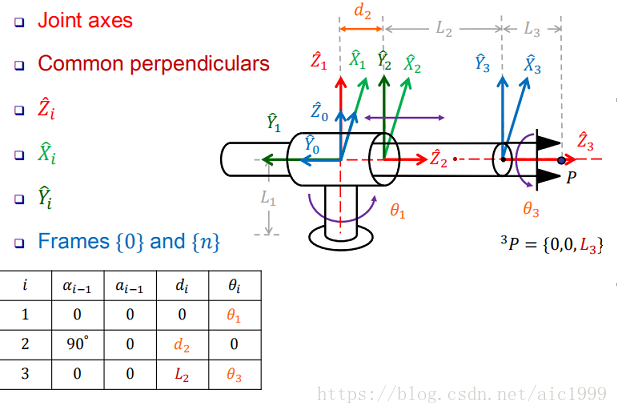
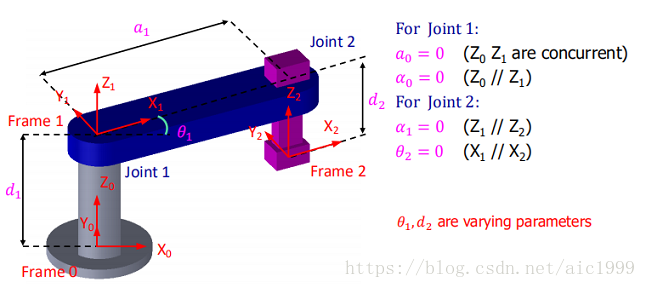
构建DH表格首先需要画出坐标系,然后根据坐标系的数据做表。 (1)如何确定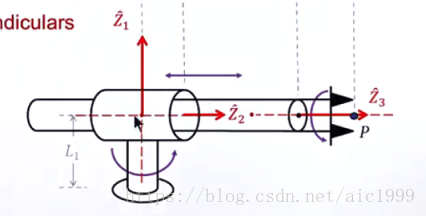 可以看到这个机械臂由转动、平移、转动关节组成,即所谓的RPR类型机械臂。
(2)如何确定
可以看到这个机械臂由转动、平移、转动关节组成,即所谓的RPR类型机械臂。
(2)如何确定  (3)如何确定
(3)如何确定  (4)处理特殊点的坐标系(最开始、最后的)
由上述三点,一般杆件的驱动坐标系都定义出来了。还有两个特殊的杆件:地杆和端杆,我们如何处理?
(4)处理特殊点的坐标系(最开始、最后的)
由上述三点,一般杆件的驱动坐标系都定义出来了。还有两个特殊的杆件:地杆和端杆,我们如何处理?
- 地杆(第0杆,link 0):无关节驱动、不动的
 当
当 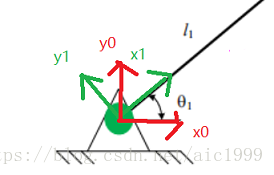 注:这个坐标系定义后不会变动,一般作为整个机械臂的参考坐标系使用。
注:这个坐标系定义后不会变动,一般作为整个机械臂的参考坐标系使用。
- 端杆(最后一杆,link n):
 一般使用上一个关节的坐标系的
一般使用上一个关节的坐标系的 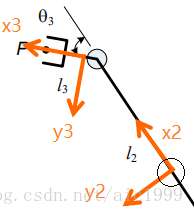 (5)构建DH表格
(5)构建DH表格
 (注意区分
(注意区分  一般而言,杆的长度我们都是已知的,数值都是可以直接得到的,所以有:
对于转轴而言,
一般而言,杆的长度我们都是已知的,数值都是可以直接得到的,所以有:
对于转轴而言,相关例题

DH表的作用
我们通过齐次矩阵{T}能轻易知道两个关节杆子相互之间的联系与位置转换,通过{T}的运算连续性也很容易知道不相邻杆件关节间的状态: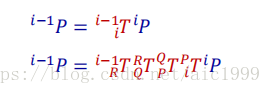 通过上式可以得知,如果我们想把物体
通过上式可以得知,如果我们想把物体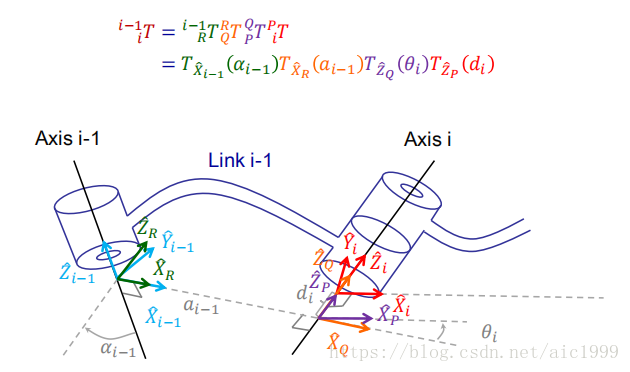 这个矩阵的意思是:
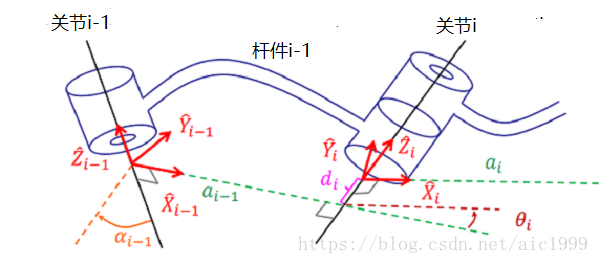
关节i-1怎么到关节i呢?
首先是围绕
这个矩阵的意思是:
关节i-1怎么到关节i呢?
首先是围绕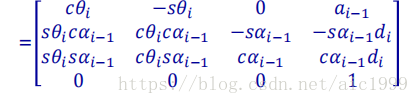
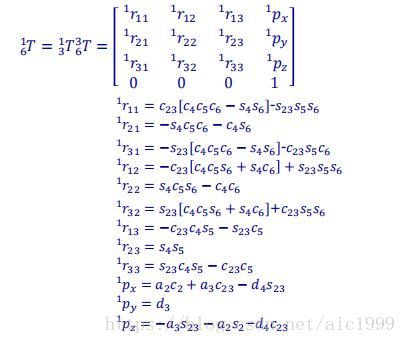
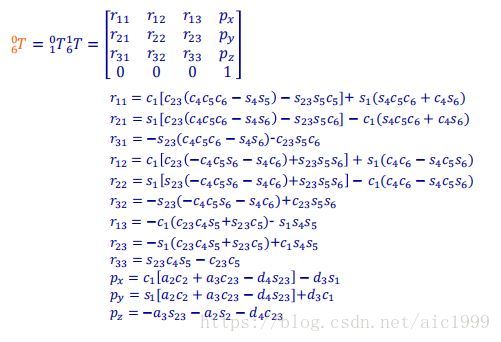
相关例子(PUMA560)
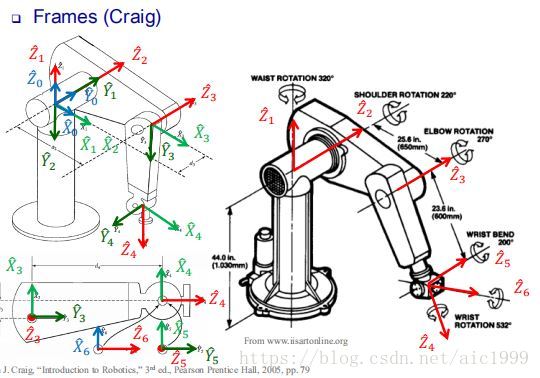 这是很经典的一个机械手臂——PUMA 560.现在需要求出
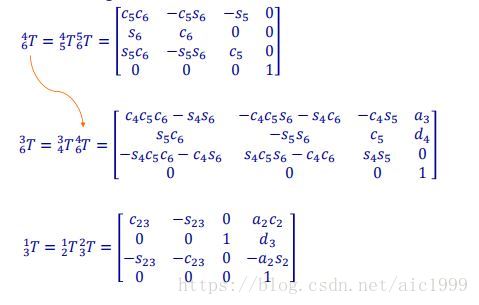
这是很经典的一个机械手臂——PUMA 560.现在需要求出 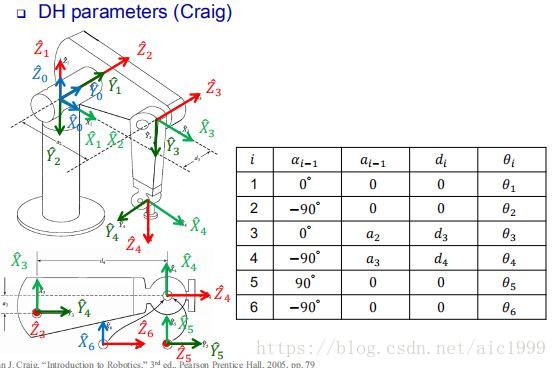 2)使用T矩阵的连续性求解
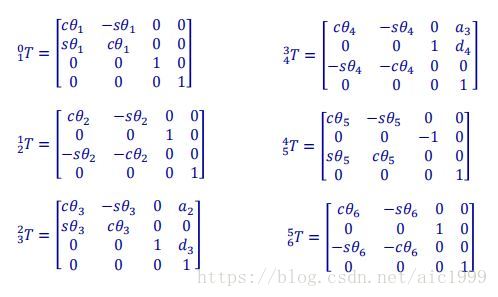
根据之前提供的公式,这六个矩阵有:
2)使用T矩阵的连续性求解
根据之前提供的公式,这六个矩阵有:
扩展(选读)
之前有提到DH表达法由两种版本,本博客举例的是craig版本的,而不是早期教材中的standard版本。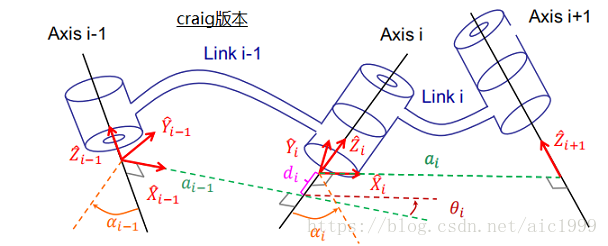
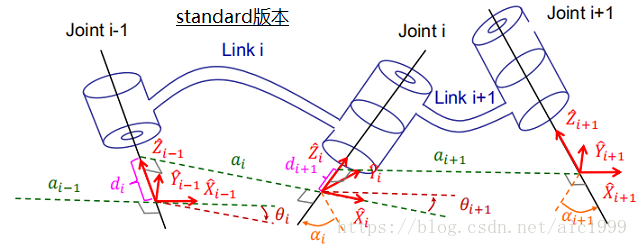 他们的区别是:
1、名称上的区别,前者的关节的表示英文为axis ,后者为 joint
2、代号定义上的区别,前者是关节i后面接杆件
他们的区别是:
1、名称上的区别,前者的关节的表示英文为axis ,后者为 joint
2、代号定义上的区别,前者是关节i后面接杆件

-
复合型关节如何得到驱动数值
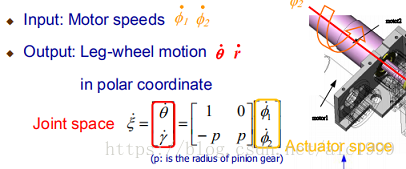
之前说过了,一般的关节分两种:转轴或者滑动杆。 其中转轴的驱动机械臂运动的数值取决于,滑动杆取决于
。 但是实际上的需求关节会有更复杂的,这里以这个机器人的轮腿为例:

可以看到的轮子不只可以转动,而且由于可以“上上下下”,所以可以达到“走路”的效果。 所以这是由两个马达控制的关节驱动,一个控制转动。
,
代表的是两个马达的状态。


评论(0)
您还未登录,请登录后发表或查看评论