

我们将开始考虑刚体的位置。
使用旋转矩阵 表示物体坐标系{b}相对于空间坐标系{s}的姿态,使用向量
表示{b}的坐标原点相对于{s}的坐标。
构造
特殊欧式群SE(3):所有4x4实矩阵T的集合。
T满足的特性为(相似于R):
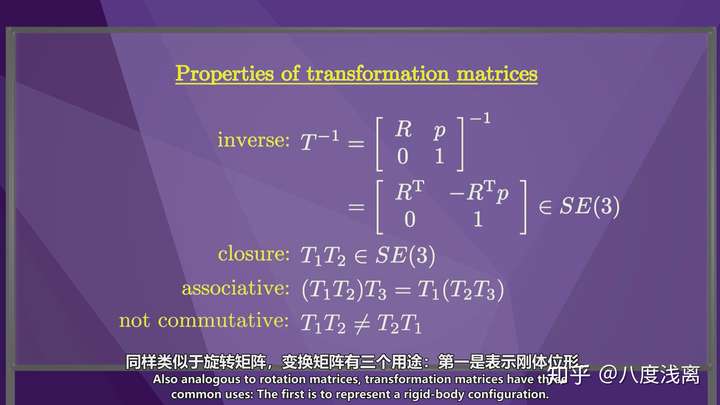
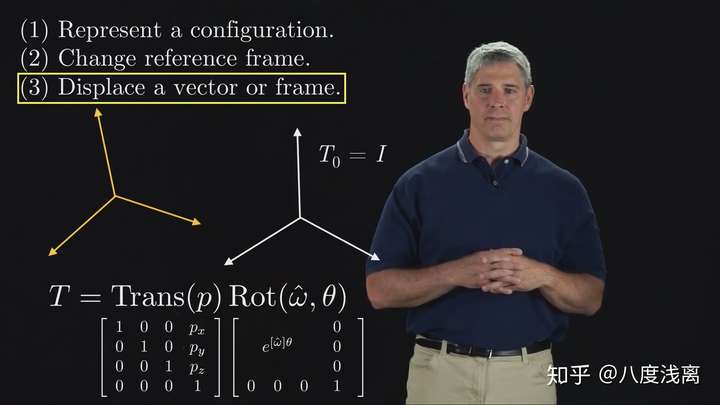
齐次变换T的用途(也与R类似):
- 表示刚体的位形(位置和姿态)
- 变换参考坐标系
- 移动(旋转和平移)向量或坐标系
对于1,不用说
对于2,当变换向量的参考坐标系时,会发现维度不匹配,需要构造为 。
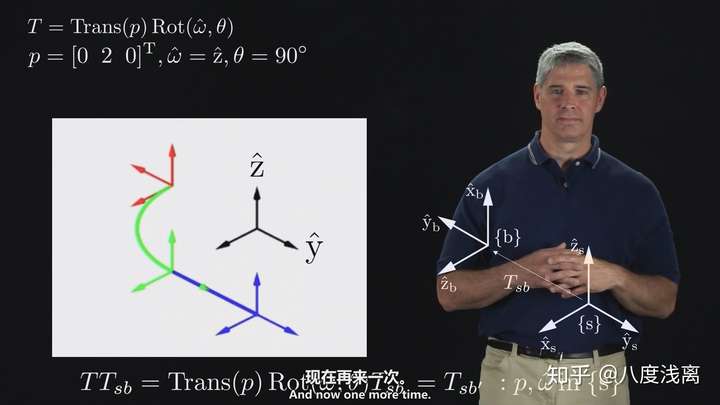
对于3,要思考算子T的左右乘。
当T为左乘时, ,可以看出物体坐标系为先相对{s}系绕轴
旋转
角,再相对{s}系移动p。
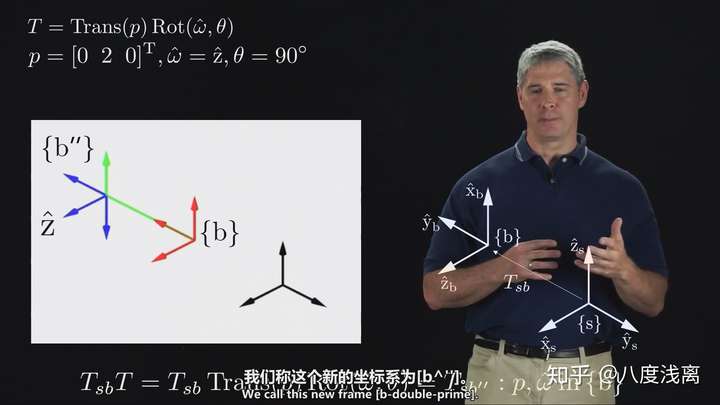
当右乘T时, 以看出物体坐标系为先相对自身移动p,再相对新生成的坐标系绕
轴转动。


评论(0)
您还未登录,请登录后发表或查看评论