

在webots中搭建双轮差速机器人
注意:
- 再学习本系列教程时,应该已经安装过ROS了并且需要有一些ROS的基本知识
webots版本:2020b rev1 ros版本:melodic webots官方参考资料:
模型如下图所示: 
1.新世界
- 打开webots后,选择
文件->新世界,创建一个新的地图。
2.点一下场景树中的worldinfo,激活 按钮。 3.点击
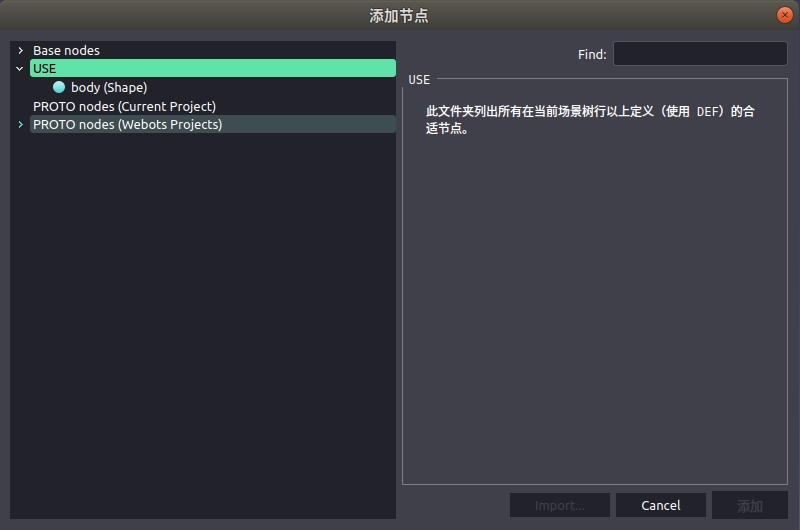
按钮。 3.点击 按钮用于添加节点或对象,会有如下窗口,并且找到
按钮用于添加节点或对象,会有如下窗口,并且找到PROTO nodes(Webots Projects)->objects->backgrounds,添加这两个节点到仿真环境中。 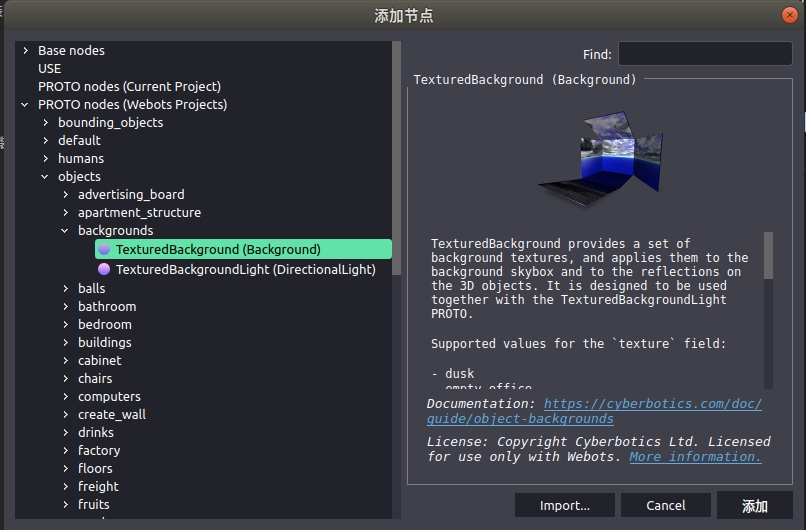
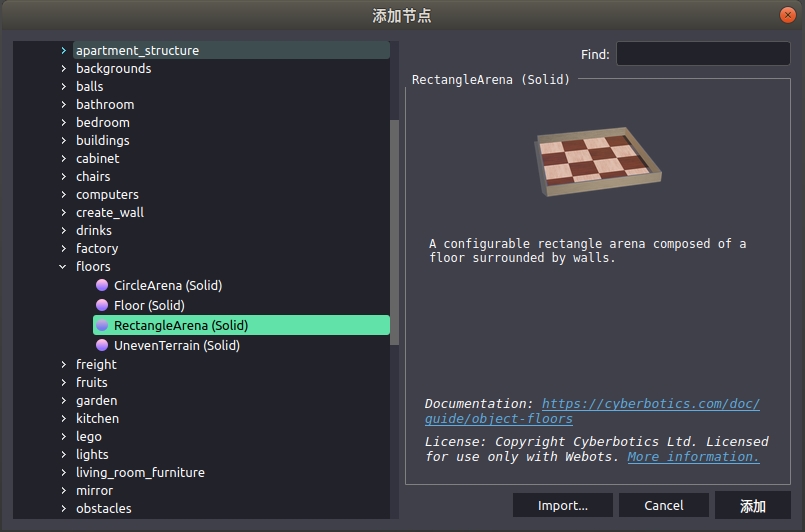
- 添加完场景后添加floor,找到
PROTO nodes(Webots Projects)->objects->floors,添加RectangleArena(solid)节点。
- 我们可以看到左边的场景树中有很多属性,这些属性都是可以修改的。
比如我们可以修改一下floorsize的大小,双击floorsize改成x=5m y=5m 可以看到地图变大了。 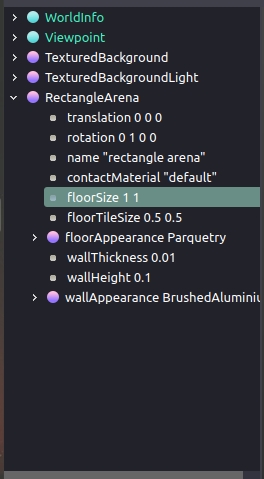
2.模型建立
2.1 body
- 在场景树中添加Robot节点
- 双击
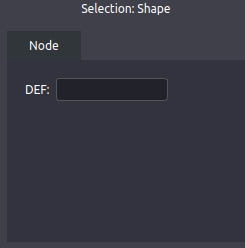
Robot->children节点,创建Base_nodes->Shape节点 - 在场景树中单击
Robot->children->Shape,下面会弹出一个DEF框,添加定义为body
- 双击appearance 添加颜色纹理
Base_nodes->Appearance,双击geometry 添加形状Base_nodes->Box。 - 双击
appearance->material添加金属属性,可以修改其节点下的diffusecolor属性更改颜色。 - 并在geometry节点添加几何属性,设置车体大小,我这里设置(x=0.5 y=0.15 z=0.5)m,将其在y上坐标设置高一些,方便后面加轮子。
- 现在我们得到这样一个物体:

- 在
Robot节点下给轮子增加碰撞属性boundingObject及重力属性physics
-
- 碰撞属性boundingObject:因为上面DEF了body,直接use body即可
-
- 重力属性physics:只要创建一个physics子节点即可
2.2 动轮
- 在
Robot->children下创建一个Base_nodes->HingeJoint节点,DEF为left_wheel,该节点下会出现三个节点jointParameters、device和endPoint - 在
HingeJoint->jointParameters节点下创建子节点HingeJointParameters,该节点将定义旋转原点(anchor)以及旋转轴(axis)。- axis是表示电机旋转轴的平行向量
- anchor表示旋转轴相对于父节点的坐标偏移量
- 点击
查看–>可选显示–>show joint Axes或者同时按下ctrl+F5,可以显示出旋转轴,方便我们调整旋转轴及旋转原点。 - 在
HingeJoint->device节点下添加电机Rotatioal Motor,Rotatioal Motor->name命名为left_motor - 在
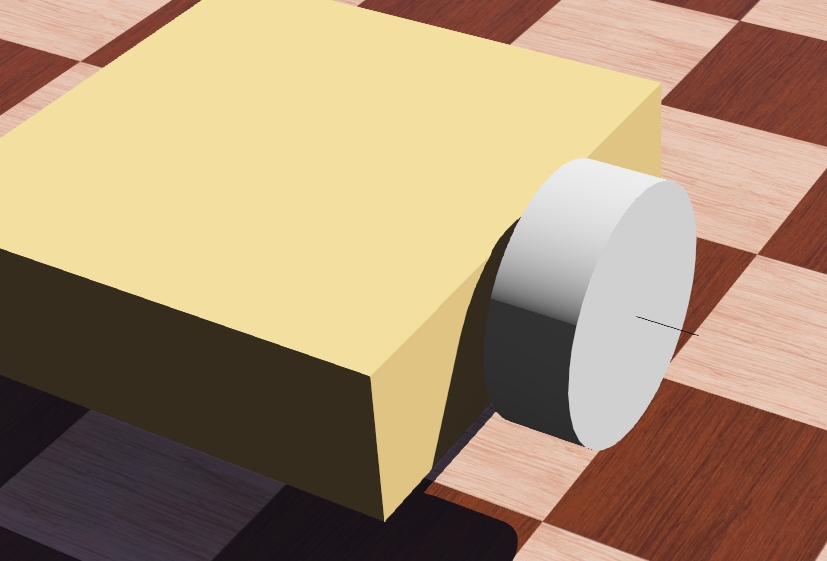
HingeJoint->endPoint节点下,增加Base_nodes->soild节点,该节点主要是设置电机模型以及其他功能参数,之后在soild->children节点下创建一个shape节点,在shape节点下设置轮子的形状为Cylinder。 - 通过调整
translation和rotation,将轮子设置到合适的位置,轮子大小设置为(height=0.08 radius=0.12)如图:

- 接下来通过调整
axis和anchor,将电机旋转轴调整到正确位置,比如我这里电机的位置相对于车体(x=0.31,y=0,z=0),于是我将旋转轴相对于父节点(body)的位置通过anchor调整至此,并且修改axis的各个值观察到我的轮子是绕x轴旋转,所以将axis设置为(1 0 0)。可以看到,轮子处有一个黑线,表示旋转轴在这里,黑线表示的就是电机旋转轴的位置和方向。笔者在这里设置的(axis=2 0 0)m和(anchor=0.31 0 0)m
- 最后,在
HingeJoint->endPoint节点下给轮子增加碰撞属性boundingObject及重力属性physics- 碰撞属性boundingObject:设置和轮子大小一致即可
- 重力属性physics:只要创建一个physics子节点即可
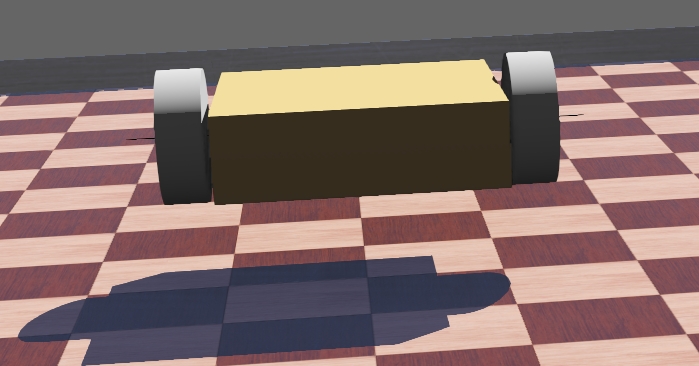
- 接下来复制出另一个轮子,按照上面的方法调整
axis和anchor,并且更改电机name为right_motor如下图所示:
2.3 导轮
- 在
Robot->children下创建一个Base_nodes->HingeJoint节点。 - 向上面的教程一样创建
jointParameters节点和endpoint节点,唯一和上面不同的是,导轮不需要电机,他是被动的。 - 对于导轮,笔者使用的是圆球
sphere,因为比较好操作。 - 位置如图所示:
- axis设置为(0 1 0)
- anchor设置为(0 -0.09 0.23)

- 在
HingeJoint->endPoint节点下给轮子增加碰撞属性boundingObject及重力属性physics- 碰撞属性boundingObject:设置和导轮大小一致即可
- 重力属性physics:只要创建一个physics子节点即可
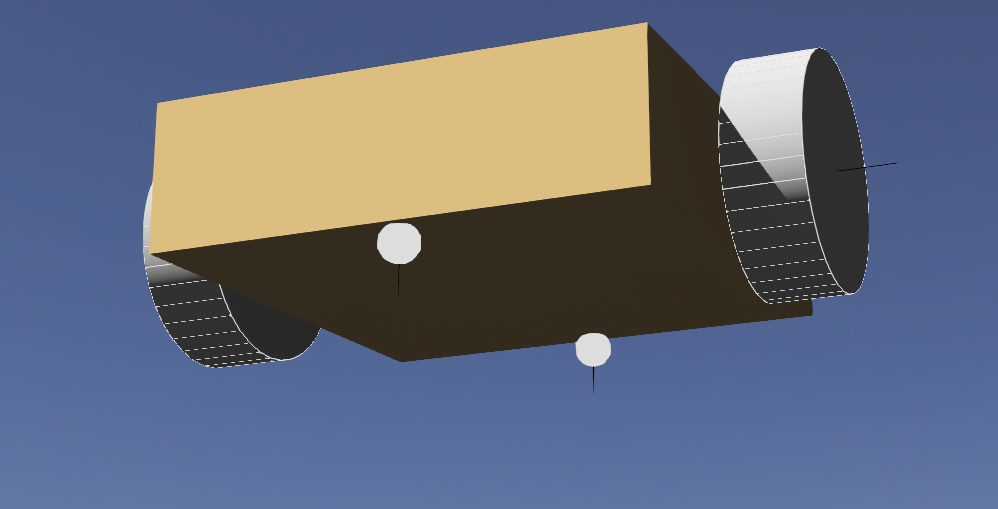
- 接下来复制出另一个导轮置另一边,按照上面的方法调整
axis和anchor如下图所示:
2.4 运行测试
按下运行按钮可以看到机器人平稳的降落到了地面上。 
2.5 保存地图
在创建完机器人后一定要记得保存地图啊!!!! 搭建地图很浪费时间的!! 在这里我们保存为webots_map.wbt
总结
本文也是基于笔者的学习和使用经验总结的,主观性较强,如果有哪些不对的地方或者不明白的地方,欢迎评论区留言交流~ 下一节通过ros控制小机器人吧。 Bye reference:https://blog.csdn.net/weixin_44508381/article/details/105669173




评论(0)
您还未登录,请登录后发表或查看评论