

*课程资料请到微信公众号“古月居”后台回复“机器人学资料”获取
该课程已开通专门交流答疑区,点击这里,发帖提问交流
课程目的

工业机器人为模拟人手臂、手腕和手功能的机械电子装置,它可以把任一物件或工具按空间位置、姿态的时变要求进行移动,从而完成某一工业生产的作业要求。是一种应用于工业自动化的,多轴的、可编程的、自动控制的、多功能的执行机构。机械臂的三大基本问题是:路径规划、运动控制、力控制。而整个机械臂研究的理论基础都建立在空间描述和变换之上。
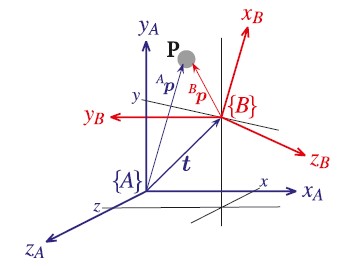
本课程将带领大家学习机器人学的基础——空间描述和变换。机器人操作,是指通过某种构使零件和工具在空间运动,这自然就需要表达零件、工具以及机构本身的位置和姿态。为了定义和运用表达位姿的数学量,我们必须定义坐标系给出表达的规则。参照世界坐标系讨论所有问题,定义的位姿参照世界坐标系,或参照由世界坐标系定义的笛卡尔坐标系。
最后一节课我们会在MATLAB中使用Robotics Toolbox插件实现部分仿真。
课程内容
1、位置、姿态、坐标系
2、坐标系间的映射
3、其次变换
4、等效旋转轴和旋转角
5、欧拉角
6、MATLAB仿真
省钱妙招


两人成团即可享受优惠!
三人拼团优惠加倍哦~
扫描下方二维码了解课程内容
下一个机器人大师就是你!
适用人群:
1、本课程为MATLAB的知识入门课程,适合有一点MATLAB基础、会使用简单的模块进行基础仿真、希望进一步了解更多功能与使用方法、以及各种小tips的人群。
2、适合机器人相关专业行业入门人士的基础学习。


评论(0)
您还未登录,请登录后发表或查看评论